一种工位器具精度检测装置的制作方法
本发明涉及机械加工,特别涉及一种工位器具精度检测装置。
背景技术:
1、在进行工位器具的生产加工时,加工完成的工位器具都需要进行精度、尺寸、外观等的检测,现有的在对工位器具进行精度检测时,一般是工人使用专用的测量工具对工位器具进行检测,在对工位器具进行检测时,需要对工位器具进行夹持固定后再进行。
2、现有公开号为:cn113008179a本公开涉及一种工位器具的精度检测方法和装置。工位器具的精度检测方法包括:在基准工位器具固定在预设位置的情况下,获取基准工位器具相对于预设位置的第一测量信息;在待调整工位器具固定在预设位置的情况下,获取待调整工位器具相对于预设位置的第二测量信息;根据第一测量信息和第二测量信息,确定待调整工位器具的误差信息;判断误差信息是否满足预设的阈值条件;在误差信息满足阈值条件的情况下,控制提示装置提示警告信息。如此,在保证待调整工位器具精度的同时,还能统一定位基准,提高工位器具的一致性。同时,还能够提高精度检测的效率。
3、然而,现有的人工对工位器具进行检测时,为保证对工位器具进行全方位的检测,导致需要多次反复夹持工位器具,操作较为繁琐,影响对工位器具的检测效率,同时,在对工位器具进行夹持时,一般采用丝杠带动夹持件对向移动的方式夹紧,工人转动丝杠力度较大时,容易挤坏工位器具。
技术实现思路
1、有鉴于此,本发明提供一种工位器具精度检测装置,实现了对工位器具多角度的检测,提高了整个检测装置的适用范围,避免了人工进行角度调节,提高了对工位器具检测的效率,保证了在夹持时的减震效果,提高了整个机械臂在夹持时的精度,保证了工位器具的生产质量。
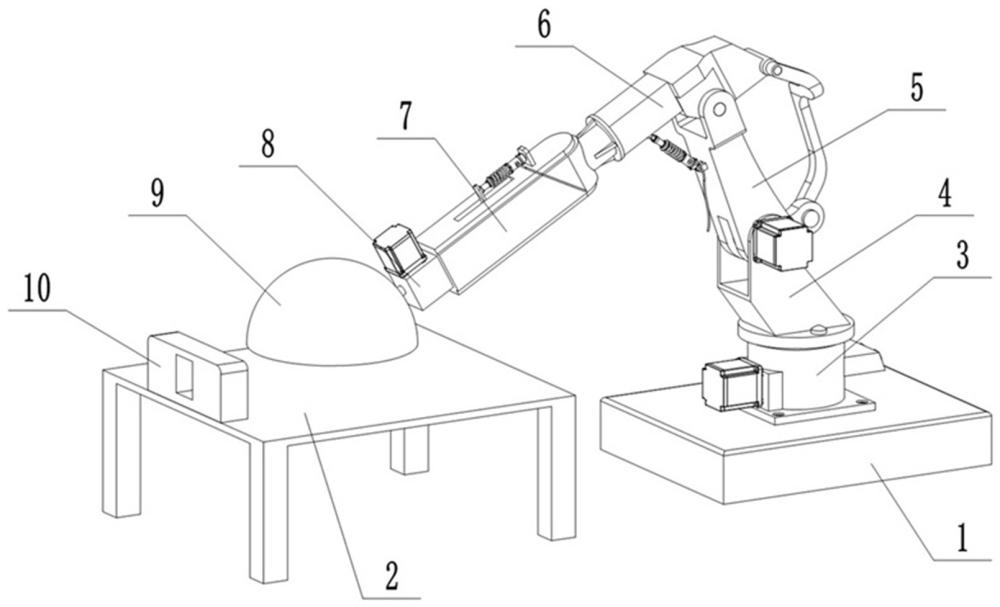
2、本发明提供了一种工位器具精度检测装置,包括检测支撑底座、检测台体、调节底座、第一固定臂、第二固定臂、第一调节臂、调节限位件、第二调节臂、抓持头、视觉检测件、角度驱动机构、凸轮调节机构和减震夹持机构;
3、所述检测台体设置在检测支撑底座的前方;
4、所述调节底座焊接在检测支撑底座的上方;
5、所述第一固定臂转动连接在调节底座的上方;
6、所述第二固定臂固定连接在第一固定臂的上方;
7、所述第一调节臂铰接在第二固定臂的上端前方;
8、所述调节限位件固定连接在第一调节臂的前端,调节限位件的上方设置有矩形槽结构;
9、所述第二调节臂滑动连接在调节限位件的内部前端,第二调节臂设置有螺纹孔结构;
10、所述抓持头转动连接在第二调节臂的前端,抓持头为碗状结构;
11、所述视觉检测件固定连接在检测台体的上方前端;
12、所述角度驱动机构设置在调节底座的内部;
13、所述凸轮调节机构设置在第一固定臂的上方;
14、所述减震夹持机构设置在第一调节臂的前方。
15、进一步的,所述角度驱动机构包括有:角度驱动电机、角度驱动蜗杆和角度驱动蜗轮;
16、所述角度驱动电机固定连接在调节底座的前端;
17、所述角度驱动蜗杆转动连接在调节底座的内部,角度驱动蜗杆同轴固定连接在角度驱动电机的转轴前端;
18、所述角度驱动蜗轮转动连接在调节底座的内部,角度驱动蜗轮与角度驱动蜗杆啮合。
19、进一步的,所述角度驱动机构还包括有:第一角度齿轮和第二角度齿轮;
20、所述第一角度齿轮同轴固定连接在角度驱动蜗轮的上方,第一角度齿轮转动连接在调节底座的内部;
21、所述第二角度齿轮转动连接在调节底座的内部,第二角度齿轮与第一角度齿轮啮合,第一固定臂同轴固定连接在第二角度齿轮的上方。
22、进一步的,所述凸轮调节机构包括有:凸轮调节电机、调节凸轮件和调节连接杆;
23、所述凸轮调节电机固定连接在第一固定臂的左侧,凸轮调节电机为自锁电机结构;
24、所述调节凸轮件转动连接在第一固定臂的上端,调节凸轮件与凸轮调节电机的转轴同轴固定连接;
25、所述调节连接杆的上端与第一调节臂的后端铰接,调节连接杆的下端与调节凸轮件的凸起部分铰接。
26、进一步的,所述减震夹持机构包括有:第一减震件;
27、所述第一减震件为液压阻尼器结构,第一减震件的下端铰接在第二固定臂的前端上方,第一减震件的上端与第一调节臂铰接。
28、进一步的,所述减震夹持机构还包括有:第二减震件;
29、所述第二减震件固定连接在调节限位件的上方,第二减震件的活塞杆前端与第二调节臂固定连接。
30、进一步的,所述减震夹持机构还包括有:夹持调节电机和夹持调节丝杆;
31、所述夹持调节电机固定连接在调节限位件的内部;
32、所述夹持调节丝杆同轴固定连接在夹持调节电机的转轴前端,夹持调节丝杆与第二调节臂螺纹连接。
33、进一步的,所述减震夹持机构还包括有:旋转驱动电机、旋转驱动蜗杆、旋转驱动蜗轮、第一旋转齿轮和第二旋转齿轮;
34、所述旋转驱动电机固定连接在第二调节臂的上方前端;
35、所述旋转驱动蜗杆转动连接在第二调节臂的内部前端,旋转驱动蜗杆同轴固定连接在旋转驱动电机的转轴下端;
36、旋转驱动蜗轮转动连接在第二调节臂的内部前端,旋转驱动蜗轮与旋转驱动蜗杆啮合;
37、所述第一旋转齿轮转动连接在第二调节臂的内部前端,第一旋转齿轮同轴固定连接在旋转驱动蜗轮的前端;
38、所述第二旋转齿轮转动连接在第二调节臂的内部前端,第二旋转齿轮与第一旋转齿轮啮合,抓持头同轴固定连接在第二旋转齿轮的前端。
39、进一步的,所述减震夹持机构还包括有:夹持液压缸和夹持头;
40、所述夹持液压缸设置有多组,多组夹持液压缸均为微型液压缸结构,多组夹持液压缸均固定连接在抓持头的内侧;
41、所述夹持头设置有多组,多组夹持头均为圆球状橡胶结构,多组夹持头均固定连接在夹持液压缸的活塞杆内侧。
42、有益效果:
43、本发明通过角度驱动机构的设置,打开角度驱动电机,角度驱动电机的转轴转动带动角度驱动蜗杆转动,角度驱动蜗杆转动带动角度驱动蜗轮转动,角度驱动蜗轮转动带动第一角度齿轮转动,第一角度齿轮转动带动第二角度齿轮转动,第二角度齿轮转动带动第一固定臂转动,此时实现了对整个机械臂水平方向的角度的调节,方便了对工位器具角度的调节,方便了对工位器具进行检测,避免了人工进行角度调节,提高了对工位器具检测的效率。
44、本发明通过凸轮调节机构的设置,打开凸轮调节电机,凸轮调节电机的转轴转动带动调节凸轮件转动,调节凸轮件转动带动调节连接杆向上移动,调节连接杆向上移动带动第一调节臂摆动,第一调节臂摆动实现了第一调节臂角度的调节,实现了对整个机械臂垂直角度的调节,实现了对整个机械臂多角度的调节,提高了整个检测装置的适用范围。
45、本发明通过减震夹持机构的设置,夹持调节电机的转轴转动带动夹持调节丝杆转动,夹持调节丝杆转动带动第二调节臂向前移动,旋转驱动电机的转轴转动带动旋转驱动蜗杆转动,旋转驱动蜗杆转动带动旋转驱动蜗轮转动,旋转驱动蜗轮转动带动抓持头转动,抓持头转动实现了对工位器具多角度的检测,打开夹持液压缸,夹持液压缸的活塞杆向内侧移动带动夹持头向内侧移动,夹持头实现了对不同型号的工位器具的夹持,增加了整个装置的适用范围,第一减震件和第二减震件实现了对第二调节臂动作时的减震效果,避免了夹持时挤坏工位器具,实现了对工位器具的保护,保证了工位器具的完整,提高了整个机械臂在夹持时的精度。
- 还没有人留言评论。精彩留言会获得点赞!