一种轨道式智能巡检机器人及其使用方法与流程
本发明涉及巡检机器人的,尤其涉及一种轨道式智能巡检机器人及其使用方法。
背景技术:
1、煤矿用巡检机器人能够代替人工对煤矿带式输送机、变电室、瓦斯抽采泵站等特殊场合进行自动巡检,采集设备运行状态数据以及环境数据,及时发现异常情况并预警,自动生成巡检数据表,提高巡检效率,保障安全生产。现有煤矿巡检机器人主要以吊挂方式沿行走轨道巡检,行走轨道多为架设在巷道顶部的工字钢。
2、由于工作环境的特殊性,其工作环境中含有大量粉尘,其粉尘会落至在轨道上,巡检机器人长时间的行走,轨道上的粉尘会附着至滚轮间隙中,阻碍滚轮的移动,影响装置的稳定运行,同时滚轮在使用一段时间后为保证滚轮的正常运作需要工作人员向滚轮轴承处添加润滑剂,增加了工作人员的工作量,且工作效率较低。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本申请的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、为解决上述技术问题,本发明提供如下技术方案:
3、一种轨道式智能巡检机器人,包括:
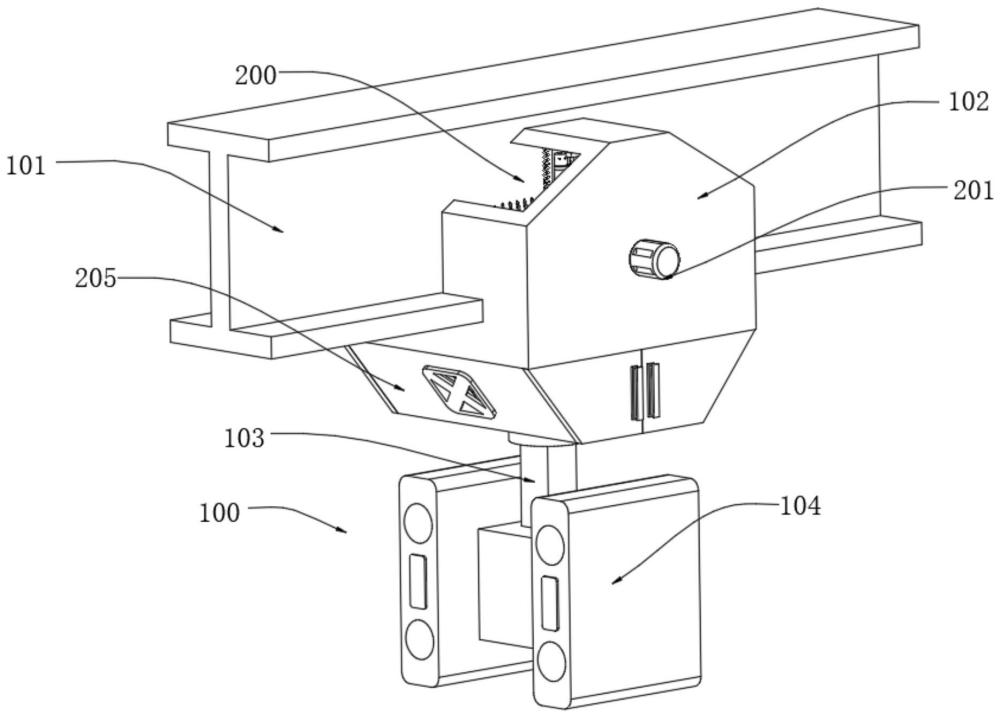
4、主体单元,包括工型轨道,所述工型轨道上设置有壳体,所述壳体下方设置有安装柱,所述安装柱上对称设有巡检摄像设备本体;
5、作业单元,包括多个电机,多个所述电机分别设置在壳体前后两侧壁上,所述电机输出端固定连接有蜗杆,所述蜗杆转动穿插在壳体上,所述蜗杆上固定设置有滚轮,所述滚轮与蜗杆之间设有轴承,所述壳体内设有对称清扫组件,所述壳体下方设有集尘组件,所述滚轮上对称转动连接有轴承罩,外侧所述轴承罩转动连接在蜗杆上,内侧所述轴承罩上方设有压注组件,所述压注组件上方设有储能组件,所述储能组件上方设有活动组件,所述活动组件下方设有清洁组件。
6、作为本发明所述一种轨道式智能巡检机器人的一种优选方案,其中:所述清扫组件包括转动辊,所述转动辊转动连接在壳体左右两内侧壁上,所述转动辊上对称固定连接有清洁辊,所述转动辊上固定连接有蜗轮,所述蜗轮与蜗杆相啮合。
7、作为本发明所述一种轨道式智能巡检机器人的一种优选方案,其中:所述集尘组件包括集尘箱,所述集尘箱固定连接在壳体上,所述安装柱设置在集尘箱底部,所述集尘箱内壁对称固定连接有滤板,所述集尘箱上对称设有风机,所述集尘箱上对称设有门体,所述壳体上对称开设有矩形开口。
8、作为本发明所述一种轨道式智能巡检机器人的一种优选方案,其中:所述压注组件包括储料筒,所述储料筒内壁上滑动连接有第一活塞板,所述第一活塞板下方填充有膏状润滑油,所述储料筒底端与内侧轴承罩之间转动设置有连接软管。
9、作为本发明所述一种轨道式智能巡检机器人的一种优选方案,其中:所述储能组件包括储能筒,所述储能筒设置在储料筒上方,所述储能筒内壁上固定连接有隔板,所述隔板上设有单向阀,所述储能筒内侧壁上滑动连接有第二活塞板,所述储能筒上开设有多个通孔,所述储能筒底部固定连接有连接管,所述储料筒螺纹连接在连接管上,所述连接管上设有电磁阀,所述储能筒上固定连接有出气管,所述出气管上设有泄压阀。
10、作为本发明所述一种轨道式智能巡检机器人的一种优选方案,其中:所述储能组件还包括固定环,所述固定环固定连接在储能筒上,所述固定环和壳体内顶壁之间对称固定连接有固定杆。
11、作为本发明所述一种轨道式智能巡检机器人的一种优选方案,其中:所述活动组件包括活动杆,所述活动杆滑动穿插在储能筒上,所述活动杆固定连接在第二活塞板上,所述活动杆上固定连接有土字板,所述土字板上对称固定连接有顶杆,所述转动辊上固定连接有凸轮,所述顶杆与凸轮相配合,所述土字板上对称固定连接有立板,所述立板与壳体内顶壁之间固定连接有弹簧。
12、作为本发明所述一种轨道式智能巡检机器人的一种优选方案,其中:所述清洁组件包括连接杆,所述连接杆固定连接在立板底面上,所述连接杆上固定连接有刷杆,所述刷杆与滚轮相配合。
13、作为本发明所述一种轨道式智能巡检机器人的一种优选方案,其中:所述工型轨道上设有防腐层,所述防腐层为铬。
14、如上所述一种轨道式智能巡检机器人的使用方法,包括如下步骤:
15、s1、启动电机,带动蜗杆转动,使得滚轮在工型轨道上进行移动,带动巡检摄像设备本体进行巡检;
16、s2、蜗杆转动,带动蜗轮转动,带动转动辊转动,使得清洁辊转动,对工型轨道上的灰尘进行清扫,同时启动风机,对集尘箱内部进行抽气,使得扬起的灰尘可随着气流通过矩形开口,进入集尘箱内进行收集,减少灰尘在滚轮上的附着;
17、s3、转动辊转动,带动凸轮转动,当凸轮与顶杆接触时,可将顶杆顶起,使得土字板向上运动,随后凸轮与顶杆脱离时,通过弹簧进行复位向下运动,如此往复,使得土字板上下运动,通过立板带动刷杆上下运动,对附着在滚轮上灰尘进行清刷,使其被收集,进一步减少了灰尘对滚轮造成不良影响;
18、s4、土字板上下运动,带动活动杆上下运动,带动第二活塞板上下运动,当第二活塞板向下运动时,可将隔板上方的气体挤压进隔板下方,随后第二活塞板向上运动至通孔上方,外界气体通过通孔进入储能筒内,如此往复对隔板下方存储高压气体,当需要注入润滑油时,开启电磁阀,使得储能筒底部的高压气体进入储料筒内,挤压第一活塞板向下运动,挤压润滑油注入轴承处。
19、本发明的有益效果:
20、1、使用时,启动电机,带动蜗杆转动,使得滚轮在工型轨道上进行移动,带动巡检摄像设备本体进行巡检,带动清洁辊转动,对工型轨道上的灰尘进行清扫,同时启动风机,使得扬起的灰尘可随着气流进入集尘箱内进行收集,减少灰尘在滚轮上的附着,避免影响滚轮的稳定运行,延长了装置的使用寿命。
21、2、转动辊转动,带动凸轮转动,当凸轮与顶杆接触时,可将顶杆顶起,使得土字板向上运动,随后凸轮与顶杆脱离时,通过弹簧进行复位向下运动,如此往复,使得土字板上下运动,通过立板带动刷杆上下运动,对附着在滚轮上灰尘进行清刷,使其被收集,进一步减少了灰尘对滚轮造成不良影响;
22、3、土字板上下运动,带动活动杆上下运动,带动第二活塞板上下运动,如此往复对隔板下方存储高压气体,当需要注入润滑油时,开启电磁阀,使得储能筒底部的高压气体进入储料筒内,挤压第一活塞板向下运动,挤压润滑油注入轴承处,无需工作人员手动添加涂抹,操作简单方便提高了工作效率。
技术特征:
1.一种轨道式智能巡检机器人,其特征在于:包括:
2.根据权利要求1所述的一种轨道式智能巡检机器人,其特征在于:所述清扫组件(204)包括转动辊(204a),所述转动辊(204a)转动连接在壳体(102)左右两内侧壁上,所述转动辊(204a)上对称固定连接有清洁辊(204b),所述转动辊(204a)上固定连接有蜗轮(204c),所述蜗轮(204c)与蜗杆(202)相啮合。
3.根据权利要求2所述的一种轨道式智能巡检机器人,其特征在于:所述集尘组件(205)包括集尘箱(205a),所述集尘箱(205a)固定连接在壳体(102)上,所述安装柱(103)设置在集尘箱(205a)底部,所述集尘箱(205a)内壁对称固定连接有滤板(205b),所述集尘箱(205a)上对称设有风机(205c),所述集尘箱(205a)上对称设有门体(205d),所述壳体(102)上对称开设有矩形开口(205e)。
4.根据权利要求3所述的一种轨道式智能巡检机器人,其特征在于:所述压注组件(207)包括储料筒(207a),所述储料筒(207a)内壁上滑动连接有第一活塞板(207b),所述第一活塞板(207b)下方填充有膏状润滑油,所述储料筒(207a)底端与内侧轴承罩(206)之间转动设置有连接软管(207c)。
5.根据权利要求4所述的一种轨道式智能巡检机器人,其特征在于:所述储能组件(208)包括储能筒(208a),所述储能筒(208a)设置在储料筒(207a)上方,所述储能筒(208a)内壁上固定连接有隔板(208b),所述隔板(208b)上设有单向阀(208c),所述储能筒(208a)内侧壁上滑动连接有第二活塞板(208d),所述储能筒(208a)上开设有多个通孔(208e),所述储能筒(208a)底部固定连接有连接管(208f),所述储料筒(207a)螺纹连接在连接管(208f)上,所述连接管(208f)上设有电磁阀(208g),所述储能筒(208a)上固定连接有出气管(208h),所述出气管(208h)上设有泄压阀(208i)。
6.根据权利要求5所述的一种轨道式智能巡检机器人,其特征在于:所述储能组件(208)还包括固定环(208j),所述固定环(208j)固定连接在储能筒(208a)上,所述固定环(208j)和壳体(102)内顶壁之间对称固定连接有固定杆(208k)。
7.根据权利要求6所述的一种轨道式智能巡检机器人,其特征在于:所述活动组件(209)包括活动杆(209a),所述活动杆(209a)滑动穿插在储能筒(208a)上,所述活动杆(209a)固定连接在第二活塞板(208d)上,所述活动杆(209a)上固定连接有土字板(209b),所述土字板(209b)上对称固定连接有顶杆(209c),所述转动辊(204a)上固定连接有凸轮(209d),所述顶杆(209c)与凸轮(209d)相配合,所述土字板(209b)上对称固定连接有立板(209e),所述立板(209e)与壳体(102)内顶壁之间固定连接有弹簧(209f)。
8.根据权利要求7所述的一种轨道式智能巡检机器人,其特征在于:所述清洁组件(210)包括连接杆(210a),所述连接杆(210a)固定连接在立板(209e)底面上,所述连接杆(210a)上固定连接有刷杆(210b),所述刷杆(210b)与滚轮(203)相配合。
9.根据权利要求8所述的一种轨道式智能巡检机器人,其特征在于:所述工型轨道(101)上设有防腐层,所述防腐层为铬。
10.根据权利要求1-9任意一项所述的一种轨道式智能巡检机器人的使用方法,其特征在于:包括如下步骤:
技术总结
本发明公开了一种轨道式智能巡检机器人,包括:主体单元,包括工型轨道,所述工型轨道上设置有壳体;作业单元,包括多个电机,所述电机输出端固定连接有蜗杆,所述蜗杆上固定设置有滚轮,所述滚轮与蜗杆之间设有轴承,所述壳体内设有对称清扫组件,所述壳体下方设有集尘组件,外侧所述轴承罩转动连接在蜗杆上,内侧所述轴承罩上方设有压注组件,所述压注组件上方设有储能组件,所述储能组件上方设有活动组件,所述活动组件下方设有清洁组件。本发明通过启动电机,带动清洁辊转动,对工型轨道上的灰尘进行清扫,同时启动风机,使得扬起的灰尘可随着气流进入集尘箱内进行收集,避免影响滚轮的稳定运行。
技术研发人员:凌建才,鞠岑,陈新杰,叶家坤,沈庆龙,李俊,张红伟,李品帝,刘银凯,钟斌
受保护的技术使用者:宁顺集团南京工程研究院有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!