通过夹持对象的种类进行适应调整的机械手的制作方法
本发明涉及机械手,更具体地说,尤其涉及通过夹持对象的种类进行适应调整的机械手。
背景技术:
1、机械手,作为机器人的末端执行器(end-effector),在上身操作和抓取任务过程中起到至关重要的作用。机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置;机械手主要由执行机构、驱动机构和控制系统三大部分组成;手部是用来抓持工件的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。
2、机械手一般可以分成两大类,即为全驱动机械手和欠驱动机械手,现在业界比较流行的是欠驱动机械手,欠驱动为驱动器的数量小于驱动关节的数量;全驱动为驱动器的数量等于驱动关节的数量。欠驱动的优点在于,成本低(驱动器少)能够很好地去适应所抓物体的形状,控制起来精简,缺点在于机械结构设计难度较大,且抓取的物体容易滑动。
3、机械手是在机械化,自动化生产过程中发展起来的一种新型装置;在现代生产过程中,机械手被广泛的运用于自动生产线中,机械人的研制和生产已成为高技术领域内,迅速发展起来的一门新兴的技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。
4、在实际应用中,机械手对于被夹持物品的形状和材质却不能很好的去适应,尤其是被夹持物品在不同部位有不同造型,以及不同部位存在不同硬度的材质;即,现有的机械手则不能很好的根据实际被夹持物品的情况进行适应性调整,容易造成被夹持物品受损;例如中国专利一种机械手(授权公告号为cn113858239b)中记载的“拍摄结构”配合“控制模块”和“夹持结构”实现“控制模块根据拍摄结构反馈的待夹持的工件的图像信息或视频信息,控制夹持结构的动作,对工件实现准确夹持,降低夹持过程中对工件的伤害,且增加夹持的成功率”,但是“夹持结构”仍然是一个夹持体,在被夹持物品在不同部位有不同造型,以及不同部位存在不同硬度的材质时,也根本不能很好的根据实际被夹持物品的情况进行适应性调整;同时中国专利基于仿人机械手装置的物体软硬识别和自适应抓取方法(授权公告号为cn112976025b)中记载的“通过电压和应变双重信号对物体软硬进行表征识别并可以准确的识别物体的软硬属性,实现仿人机械手对不同软硬属性物体的自适应稳定抓取”,虽然可以做到根据物体的软硬属性进行自适应稳定抓取,但是只能简单弯曲调整形态的手指,在被夹持物品存在不同部位有不同造型,以及不同部位存在不同硬度的材质时,则也不能好的多角度调整形态去适应性夹持。
5、因此,针对“被夹持物品在不同部位有不同造型,以及不同部位存在不同硬度的材质时,现有的机械手则不能很好的根据实际被夹持物品的情况进行适应性调整,容易造成被夹持物品受损”的问题,特提出了通过夹持对象的种类进行适应调整的机械手。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点:被夹持物品在不同部位有不同造型,以及不同部位存在不同硬度的材质时,现有的机械手则不能很好的根据实际被夹持物品的情况进行适应性调整,容易造成被夹持物品受损,而提出的通过夹持对象的种类进行适应调整的机械手。
2、具体技术方案为:通过夹持对象的种类进行适应调整的机械手,包括加装在机械臂上的夹持手,所述夹持手包括支撑调节座和多关节调节夹板;多关节调节夹板设置有多个,并环形滑动装配在支撑调节座四周;通过调节多个多关节调节夹板在支撑调节座四周的分布,用于利用不同位置的支撑点去适应被夹持物品不同部位的不同造型,和其不同部位的不同硬度材质;
3、多关节调节夹板包括多个单位调节夹板和多个多体位调节关节,多个单位调节夹板和多个多体位调节关节呈依次交叉阵列分布;通过多体位调节关节多方位调节其两侧的单位调节夹板的错位分布,用于去适应被夹持物品不同部位的不同造型,和其不同部位的不同硬度材质。
4、在面对被夹持物品不同部位具有的不同造型,和不同部位具有的不同硬度材质时,使用多个多关节调节夹板在支撑调节座四周,进行滑动调节,形成在支撑调节座四周的不同程度的分离分布;以及结合使用多体位调节关节多方位调节其两侧的单位调节夹板的错位分布,做到多关节调节夹板在其不同部位的不同形态弯折,去实现根据实际被夹持物品的情况进行适应性调整,避免造成被夹持物品受损。
5、在本发明的技术方案中,所述支撑调节座包括定位盘,定位盘外侧壁上套设固定有齿条圈;多关节调节夹板通过其包含有的调节驱动组件动力传动连接在齿条圈上;通过调节驱动组件与齿条圈作用,带动多关节调节夹板在支撑调节座四周滑动,用于利用多个多关节调节夹板的分布,以不同位置的支撑点去适应被夹持物品不同部位的不同造型,和其不同部位的不同硬度材质。
6、进一步的,所述调节驱动组件包括限位滑块,限位滑块上开设有限位槽,限位滑块通过限位槽滑动卡设在齿条圈上;限位槽内侧的限位滑块内部开设有收纳腔,收纳腔内部转动装配有齿轮,齿轮啮合在齿条圈上;齿轮固定在驱动电机一的输出轴上,驱动电机一装配在限位滑块上。
7、再进一步的,所述限位滑块上固定有连接板,连接板在其端头处固定有导向板一,导向板一上开设有导向槽一,导向槽一上滑动装配有调节滑块一,调节滑块一上固定有电动伸缩杆一,电动伸缩杆一固定在导向槽一内部;单位调节夹板固定在调节滑块一上。
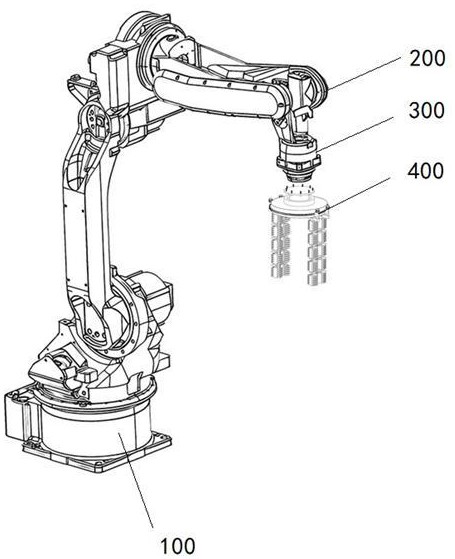
8、进一步的,所述支撑调节座还包括连接盘,连接盘一端固定在定位盘上,另一端固定有安装盘;安装盘通过多个螺栓可拆卸式安装在连接臂上,连接臂安装在机械臂上,机械臂安装在底座上。
9、在本发明的技术方案中,所述单位调节夹板包括动力箱,动力箱内部安装有驱动电机二;位于驱动电机二的输出轴上固定有转轴二,转轴二转动装配在动力箱上;转轴二安装在多体位调节关节上。
10、进一步的,所述多体位调节关节包括导向板二,导向板二上开设有导向槽二,导向槽二上滑动装配有调节滑块二,调节滑块二上固定有转轴一,转轴一固定在单位调节夹板上;导向槽二内部安装有电动伸缩杆二,电动伸缩杆二固定在调节滑块二上。
11、再进一步的,所述转轴一为电动伸缩杆三,通过电动伸缩杆三进行伸缩调整,用于调节相邻两个单位调节夹板之间的距离。
12、调节方式一为电动伸缩杆二通过调节滑块二带动相邻另一个单位调节夹板移动,做到相邻的单位调节夹板前后错位;调节方式二为驱动电机二将动力传递到转轴二上,通过转轴二带动相邻另一个单位调节夹板左右旋转;调节方式三为通过电动伸缩杆三进行伸缩调整,调节相邻两个单位调节夹板之间的距离;调节方式一、调节方式二和调节方式三组合实现提高两侧的单位调节夹板的错位分布覆盖范围,做到多关节调节夹板大范围通过其不同部位的不同形态弯折,去利用多关节调节夹板根据实际被夹持物品的情况进行适应性调整。
13、进一步的,所述单位调节夹板还包括夹板,夹板固定在动力箱上,夹板上开设有多个呈阵列分布的穿插孔,穿插孔中对应活动穿插有单位支撑柱。
14、再进一步的,所述单位支撑柱包括定位柱,定位柱一端固定有限位盘,另一端固定有按压板;限位盘和按压板之间的定位柱活动穿插在穿插孔中;穿插孔中的定位柱上固定有固定环,固定环上活动套设有弹簧,弹簧在远离固定环一端固定有套环,套环活动套设在定位柱上;套环在远离弹簧一侧设置有磁性限位筒,磁性限位筒活动套设在定位柱上;磁性限位筒的内侧壁上铺设有电磁线圈,磁性限位筒通过固定杆固定在穿插孔的内壁上。
15、一处局部多个,或者多处局部多个单位支撑柱,在面对被夹持物品不同部位的不同造型时,在穿插孔中活动穿插,即定位柱在穿插孔中活动穿插,带动固定环向磁性限位筒挤压弹簧,完成适应被夹持物品不同部位的不同造型,此后为电磁线圈通电,使得磁性限位筒吸附限位住定位柱;实现适应被夹持物品不同部位的不同造型的基础上,以不同位置的支撑点去适应被夹持物品不同部位的不同造型,和其不同部位的不同硬度材质。
16、与现有技术相比,本发明通过夹持对象的种类进行适应调整的机械手可以做到:
17、在面对被夹持物品不同部位具有的不同造型,和不同部位具有的不同硬度材质时,使用多个多关节调节夹板在支撑调节座四周进行滑动调节,形成在支撑调节座四周的不同程度的分离分布;以及结合使用多体位调节关节多方位调节其两侧的单位调节夹板的错位分布,做到多关节调节夹板在其不同部位的不同形态弯折,去实现根据实际被夹持物品的情况进行适应性调整,避免造成被夹持物品受损;
18、调节方式一为电动伸缩杆二通过调节滑块二带动相邻另一个单位调节夹板移动,做到相邻的单位调节夹板前后错位;调节方式二为驱动电机二将动力传递到转轴二上,通过转轴二带动相邻另一个单位调节夹板左右旋转;调节方式三为通过电动伸缩杆三进行伸缩调整,调节相邻两个单位调节夹板之间的距离;调节方式一、调节方式二和调节方式三组合实现提高两侧的单位调节夹板的错位分布覆盖范围,做到多关节调节夹板大范围通过其不同部位的不同形态弯折,去利用多关节调节夹板根据实际被夹持物品的情况进行适应性调整;
19、一处局部多个,或者多处局部多个单位支撑柱,在面对被夹持物品不同部位的不同造型时,在穿插孔中活动穿插,即定位柱在穿插孔中活动穿插,带动固定环向磁性限位筒挤压弹簧,完成适应被夹持物品不同部位的不同造型,此后为电磁线圈通电,使得磁性限位筒吸附限位住定位柱;实现适应被夹持物品不同部位的不同造型的基础上,以不同位置的支撑点去适应被夹持物品不同部位的不同造型,和其不同部位的不同硬度材质。
- 还没有人留言评论。精彩留言会获得点赞!