拾起垃圾的机器人的控制方法及拾起垃圾的机器人与流程
本发明涉及机器人,具体涉及一种拾起垃圾的机器人的控制方法及拾起垃圾的机器人。
背景技术:
1、随着人们生活水平的日益提高,旅游业得到了快速发展,然而随之而来的问题就是公园、景区等一些公共场所的垃圾不能够得到及时的清理,影响公共场所的环境卫生。目前,市场上生产了用于垃圾收集的机器人,该机器人依靠机械臂末端的夹子拾取垃圾,这样提高了环卫工人的工作环境,同时也节约了劳动力。
2、然而,该拾起垃圾的机器人只能用于某一固定场所,无法进行自动的路径规划,这使得机器人的数量必然增加,应用成本大幅增。
技术实现思路
1、本发明解决的问题是现有的拾起垃圾的机器人的控制方法中无法实现自动路径规划的问题。
2、为解决上述问题,本发明提供一种拾起垃圾的机器人的控制方法,所述机器人包括摄像部件和执行部件,所述控制方法包括:
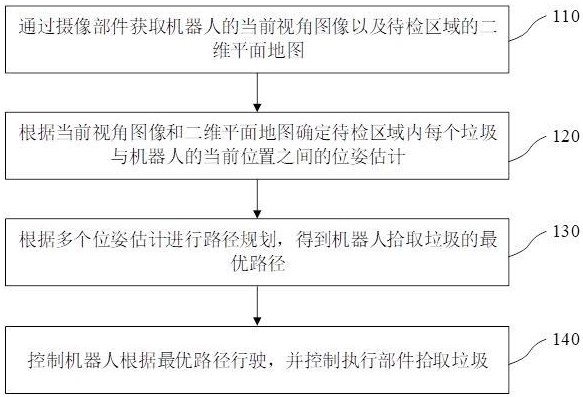
3、通过所述摄像部件获取所述机器人的当前视角图像以及待检区域的二维平面地图;
4、根据所述当前视角图像和所述二维平面地图确定所述待检区域内每个垃圾与所述机器人的当前位置之间的位姿估计;
5、根据多个所述位姿估计进行路径规划,得到所述机器人拾取所述垃圾的最优路径;
6、控制所述机器人根据所述最优路径行驶,并控制所述执行部件拾取所述垃圾;
7、其中,所述根据所述当前视角图像和所述二维平面地图确定所述待检区域内每个垃圾与所述机器人的当前位置之间的位姿估计包括:
8、获取当前视角下与所述当前视角图像同分辨率的深度图像;
9、在预设数据库中将所述当前视角图像的每个像素和所述深度图像的每个像素进行逐像素匹配以得到神经网络鸟瞰图;
10、将所述神经网络鸟瞰图与预设神经网络地图进行位置匹配,以得到所述机器人在当前视角下的位姿估计。
11、可选的,所述将所述神经网络鸟瞰图与预设神经网络地图进行位置匹配,以得到所述机器人在当前视角下的位姿估计包括:
12、将所述神经网络鸟瞰图在所述预设神经网络地图中进行旋转匹配;
13、当所述神经网络鸟瞰图与所述预设神经网络地图的重合率最大时,确定所述神经网络鸟瞰图的旋转角度;
14、根据所述旋转角度和深度信息得到每个垃圾与所述机器人之间的位姿估计,其中,所述位姿估计包括偏移量和偏转角度。
15、可选的,在所述将所述神经网络鸟瞰图与预设神经网络地图进行位置匹配之前,所述控制方法还包括:
16、将所述二维平面地图中的区域、线和点栅格化为具有固定采样距离的图像,以得到栅格地图;
17、将所述栅格地图中的各个类别特征嵌入关联形成特征映射;
18、通过卷积神经网络提取与定位相关的几何特征,将所述几何特征编码值地图中以得到所述预设神经网络地图。
19、可选的,所述根据多个所述位姿估计进行路径规划,得到所述机器人拾取所述垃圾的最优路径包括:
20、采用解决旅行商问题的优化方法在预设时间内进行有限迭代次数计算以确定行驶路线最短的路径为最优路径。
21、可选的,所述控制方法还包括:
22、在拾取所述垃圾时判断所述待检区域内是否有其他待拾取的垃圾;
23、若存在,则根据所述待检区域内剩余的垃圾与所述机器人的当前位置之间的位姿估计更新所述路径规划,并控制所述机器人根据更新后的路径规划进行拾取垃圾。
24、可选的,所述控制方法还包括:
25、判断当前导航路径上是否具有障碍物;
26、若存在障碍物,则对所述最优路径进行调整以规避所述障碍物。
27、本技术实施例还提供一种拾起垃圾的机器人,所述机器人包括:
28、摄像部件,所述摄像部件用于获取所述机器人的当前视角图像、获取当前视角下与所述当前视角图像同分辨率的深度图像以及获取所述待检区域的二维平面地图;
29、执行部件,所述执行部件用于拾取垃圾;
30、控制部件,所述控制部件均与所述摄像部件和所述执行部件连接,用于根据获取的所述当前视角图像和所述二维平面地图确定待检区域内每个垃圾与所述机器人的当前位置之间的位姿估计,根据多个所述位姿估计进行路径规划,得到所述机器人拾取所述垃圾的最优路径;控制所述机器人根据所述最优路径行驶,并控制所述执行部件拾取所述垃圾;
31、其中,所述根据获取的所述当前视角图像和所述二维平面地图确定所述待检区域内每个垃圾与所述机器人的当前位置之间的位姿估计包括:
32、获取当前视角下与所述当前视角图像同分辨率的深度图像;
33、在预设数据库中将所述当前视角图像的每个像素和所述深度图像的每个像素进行逐像素匹配以得到神经网络鸟瞰图;
34、将所述神经网络鸟瞰图与预设神经网络地图进行位置匹配,以得到所述机器人在当前视角下的位姿估计。
35、可选的,所述摄像部件包括多线激光雷达、双目相机和预定位单元,所述预定位单元与所述多线激光雷达和所述控制部件连接,所述双目相机用于获取所述机器人的当前视角图像,所述多线激光雷达用于获取所述待检区域的三维点云,所述预定位单元用于将所述三维点云压缩成二维平面地图后发送至所述控制部件。
36、可选的,所述机器人还包括:
37、移动部件,所述移动部件用于调整所述机器人的位置和方向;
38、垃圾箱,所述垃圾箱设置在所述移动部件上,用于暂存垃圾;和
39、立柱,所述立柱与所述移动部件连接,所述立柱上设置有所述多线激光雷达和所述双目相机,其中,所述双目相机设置在所述多线激光雷达靠近所述移动部件的一侧。
40、本技术实施例所提供的拾起垃圾的机器人的控制方法,机器人包括摄像部件和执行部件,该控制方法包括通过摄像部件获取机器人的当前视角图像以及待检区域的二维平面地图;根据当前视角图像和二维平面地图确定待检区域内每个垃圾与机器人的当前位置之间的位姿估计;根据多个位姿估计进行路径规划,得到机器人拾取垃圾的最优路径;控制机器人根据最优路径行驶,并控制执行部件拾取垃圾,其中,根据当前视角图像和二维平面地图确定待检区域内每个垃圾与机器人的当前位置之间的位姿估计包括:获取当前视角下与当前视角图像同分辨率的深度图像;在预设数据库中将当前视角图像的每个像素和深度图像的每个像素进行逐像素匹配以得到神经网络鸟瞰图;将神经网络鸟瞰图与预设神经网络地图进行位置匹配,以得到机器人在当前视角下的位姿估计。本技术通过机器人自动对待检区域内的垃圾进行识别以及位姿估计后规划出行驶的最优路径,既加快了机器人拾取垃圾的速度,提高了机器人的工作效率,也由于机器人会自动规划行驶路径,因而也不需要在每个区域都增设机器人,从而降低了成本。另外,本技术通过获取的机器人的当前视角图像以及待检区域的二维平面地图以确定待检区域内每个垃圾与机器人的位姿估计,将原本基于三维空间的机器人移动和机械臂拾取的组合优化问题简化为了在二维平面中进行导航和机械臂在待检区域平面内进行移动的两个独立优化问题,能够简化整体考虑时带来的复杂解耦问题,提高了计算效率和机器人的响应速度,进而提高了机器人的工作效率。
- 还没有人留言评论。精彩留言会获得点赞!