灭火机器人的制作方法
本发明涉及灭火设备,具体而言,涉及一种灭火机器人。
背景技术:
1、目前,现有的灭火机器人具有ocr(即光学字符识别)和图像识别的能力,能模拟和代替专业人员进行不间断的巡检、扫描及灭火操作,因此在各种工作场合(尤其是较为恶劣或危险的工作环境)中的应用较为广泛,灭火机器人其可以代替人力在易燃易爆场所或人员密集场所进行巡检作业,在发现火情时可第一时间报警,同时可自动进行灭火,实现火灾发生初期的快速灭火。
2、但是现有的灭火机器人在使用时还存在一定缺陷,例如:现有的灭火机器人一般采用履带式或者轮式机器人运动结构,两种运动结构在转轮或者履带轮的两侧均设置有用于保护运动机构的护板,以保护转轮或者履带轮,实际的灭火机器人在工作中,护板会粘连灰尘、泥土等异物,因此需要人工及时拆卸护板,并清洁护板以及转轮或履带,以免粘连在护板上的异物卡住转轮或者履带,进而导致灭火机器人无法运动;但是现有的灭火机器人的护板无法快速拆卸,进而导致护板以及转轮或履带的清洁不便,维护效率低下的问题,不利于灭火机器人的整体维护。
技术实现思路
1、本发明提供了一种灭火机器人,以解决现有技术中的灭火机器人两侧的护板无法快速且便捷地拆卸,进而导致护板以及转轮或履带的清洁不便的问题。
2、为了解决上述问题,本发明提供了一种灭火机器人,包括:承载平台;灭火装置,设置在承载平台的上方,用于喷洒灭火介质;运动装置,设置在承载平台的下方,用于带动承载平台运动;支撑结构,固定设置在承载平台的下方,且位于运动装置的外部;护板,在运动装置的外部遮挡运动装置;快拆装置,护板通过快拆装置与支撑结构可拆卸连接;快拆装置包括承载体和设置在承载体上的拆卸结构,承载体的一端的内部具有配合孔,支撑结构的一端伸入配合孔内,并通过拆卸结构与承载体可拆卸连接;承载体的另一端与护板固定连接。
3、进一步地,支撑结构包括支撑杆;承载体上具有贯通孔,贯通孔与配合孔连通,拆卸结构包括:调节件,调节件可活动地的设置在承载体的外部;配合件,配合件弹性设置在贯通孔内,且在贯通孔内可移动;支撑杆伸入配合孔的一端具有定位凹槽,配合件的一端与定位凹槽配合,配合件的另一端与调节件配合;其中,在拆卸结构处于固定状态下,调节件限位配合件的一端,配合件的另一端伸入定位凹槽内,以约束承载体和支撑杆相对固定;在调节件与配合件脱离接触后,配合件在弹力作用下伸出定位凹槽,承载体和支撑杆脱离连接,以拆卸护板。
4、进一步地,调节件的一侧设置有球形凸块,配合件的一端设置有球形凹槽;在固定状态下,球形凹槽与球形凸块配合,以限位配合件和调节件的相对位置。
5、进一步地,配合件包括依次连接的配合轴、定位板和定位块,在固定状态下,定位块位于定位凹槽内,且与定位凹槽配合,定位板与支撑杆的外周面抵接。
6、进一步地,配合件为多个,贯通孔为多个,多个贯通孔在承载体的周向间隔设置;定位凹槽为多个,多个定位凹槽在支撑杆的周向间隔设置;多个贯通孔、多个定位凹槽分别与多个配合件一一对应配合;调节件套设在承载体的外周面上;其中,在固定状态下,调节件同时限位多个配合件的一端,多个配合件的另一端分别一一伸入多个定位凹槽内,以共同约束承载体和支撑杆相对固定。
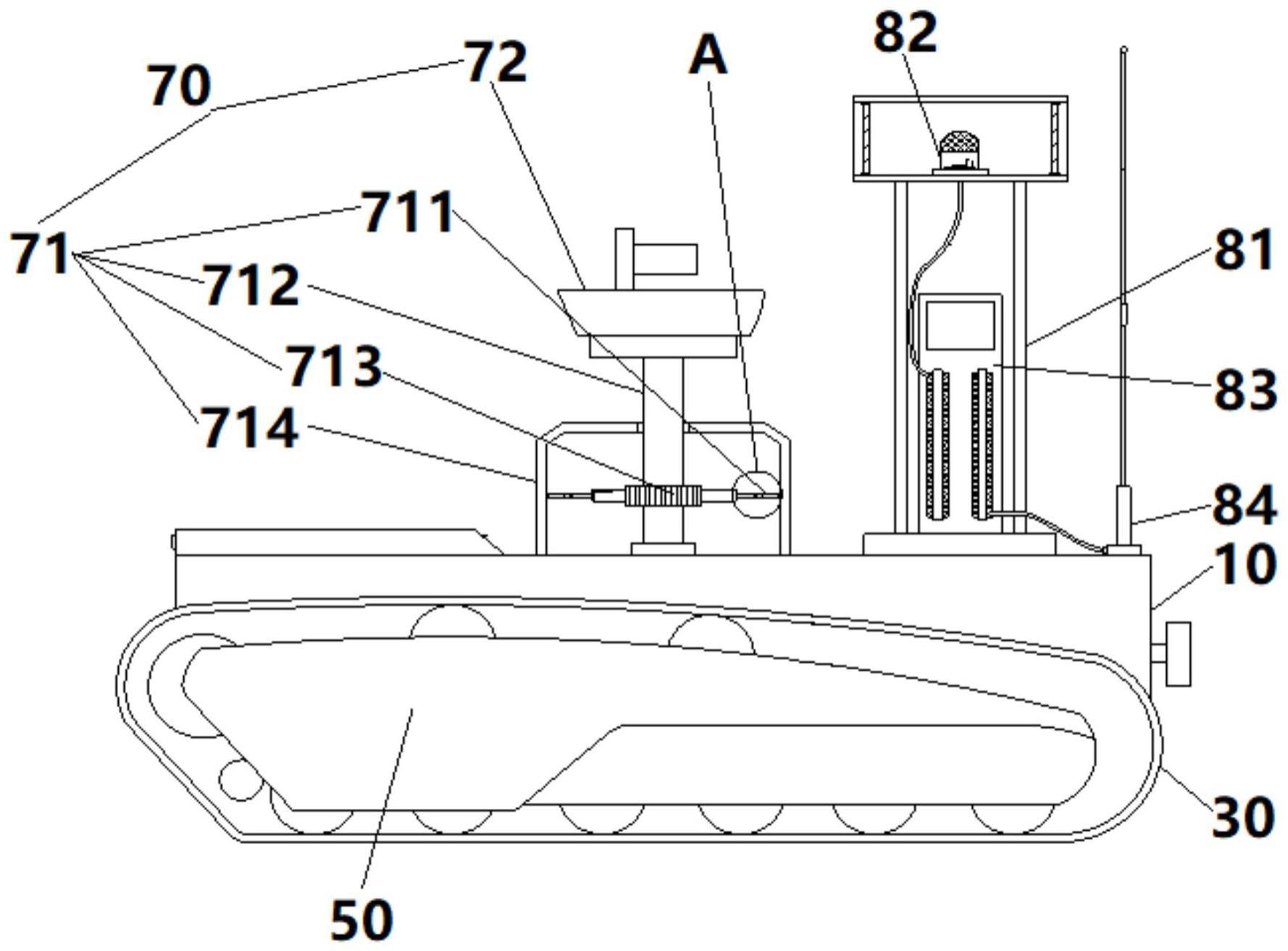
7、进一步地,灭火机器人还包括图像采集装置,图像采集装置可转动地设置在承载平台的上方,用于图像采集;图像采集装置包括转动结构和设置在转动结构上的摄像头,转动结构设置在承载平台的上方,以带动摄像头转动。
8、进一步地,转动结构包括:驱动部;转动杆,转动杆的一端与摄像头连接;转动杆的周向具有轮齿;齿条件,齿条件与驱动部连接;齿条件与轮齿配合;其中,驱动部驱动齿条件往复直线运动,带动转动杆转动,以驱动摄像头转动。
9、进一步地,灭火机器人还包括气体检测装置,气体检测装置包括:感应柱,感应柱设置在承载平台上;气体检测模块,设置在感应柱远离承载平台的一端,用于检测外部气体成分;信号处理器,设置在感应柱上,与气体检测模块电连接,以处理气体检测模块的检测数据;发射天线,设置在承载平台上,与信号处理器电连接,以将检测数据传输至外部设备。
10、进一步地,承载平台具有安全腔,灭火装置包括用于容纳灭火剂的干粉罐,干粉罐设置在安全腔内;灭火机器人还包括用于固定干粉罐的绑带,绑带的一端与安全腔的内壁固定连接,绑带的另一端与安全腔的内壁可拆卸连接。
11、进一步地,灭火机器人还包括检修门,检修门可转动地设置在承载平台上,以开闭安全腔。
12、应用本发明的技术方案,本发明提供了一种灭火机器人,包括:承载平台;灭火装置,设置在承载平台的上方,用于喷洒灭火介质;运动装置,设置在承载平台的下方,用于带动承载平台运动;支撑结构,固定设置在承载平台的下方,且位于运动装置的外部;护板,在运动装置的外部遮挡运动装置;快拆装置,护板通过快拆装置与支撑结构可拆卸连接;快拆装置包括承载体和设置在承载体上的拆卸结构,承载体的一端的内部具有配合孔,支撑结构的一端伸入配合孔内,并通过拆卸结构与承载体可拆卸连接;承载体的另一端与护板固定连接。本发明通过设置护板通过快拆装置与支撑结构可拆卸连接,实现了灭火机器人两侧的护板快速且便捷地拆卸,进而解决了护板以及转轮或履带清洁不便的问题,提高了灭火机器人的整体维护效率。通过设置承载体和拆卸结构,保证了快拆装置的结构简单化和轻量化,既易于加工成型,又有效降低了快拆装置的成本。
技术特征:
1.一种灭火机器人,其特征在于,包括:
2.根据权利要求1所述的灭火机器人,其特征在于,所述支撑结构(40)包括支撑杆(41);所述承载体(61)上具有贯通孔(612),所述贯通孔(612)与所述配合孔(611)连通,所述拆卸结构(62)包括:
3.根据权利要求2所述的灭火机器人,其特征在于,所述调节件(621)的一侧设置有球形凸块(6211),所述配合件(622)的一端设置有球形凹槽(6221);在所述固定状态下,所述球形凹槽(6221)与所述球形凸块(6211)配合,以限位所述配合件(622)和所述调节件(621)的相对位置。
4.根据权利要求2所述的灭火机器人,其特征在于,所述配合件(622)包括依次连接的配合轴(6222)、定位板(6223)和定位块(6224),在所述固定状态下,所述定位块(6224)位于所述定位凹槽(411)内,且与所述定位凹槽(411)配合,所述定位板(6223)与所述支撑杆(41)的外周面抵接。
5.根据权利要求2所述的灭火机器人,其特征在于,所述配合件(622)为多个,所述贯通孔(612)为多个,多个所述贯通孔(612)在所述承载体(61)的周向间隔设置;所述定位凹槽(411)为多个,多个所述定位凹槽(411)在所述支撑杆(41)的周向间隔设置;多个所述贯通孔(612)、多个所述定位凹槽(411)分别与多个所述配合件(622)一一对应配合;所述调节件(621)套设在所述承载体(61)的外周面上;其中,在所述固定状态下,所述调节件(621)同时限位多个所述配合件(622)的一端,多个所述配合件(622)的另一端分别一一伸入多个所述定位凹槽(411)内,以共同约束所述承载体(61)和所述支撑杆(41)相对固定。
6.根据权利要求1所述的灭火机器人,其特征在于,所述灭火机器人还包括图像采集装置(70),所述图像采集装置(70)可转动地设置在所述承载平台(10)的上方,用于图像采集;所述图像采集装置(70)包括转动结构(71)和设置在所述转动结构(71)上的摄像头(72),所述转动结构(71)设置在所述承载平台(10)的上方,以带动所述摄像头(72)转动。
7.根据权利要求6所述的灭火机器人,其特征在于,所述转动结构(71)包括:
8.根据权利要求1所述的灭火机器人,其特征在于,所述灭火机器人还包括气体检测装置(80),所述气体检测装置(80)包括:
9.根据权利要求1所述的灭火机器人,其特征在于,所述承载平台(10)具有安全腔(11),所述灭火装置(20)包括用于容纳灭火剂的干粉罐(21),所述干粉罐(21)设置在所述安全腔(11)内;所述灭火机器人还包括用于固定所述干粉罐(21)的绑带(90),所述绑带(90)的一端与所述安全腔(11)的内壁固定连接,所述绑带(90)的另一端与所述安全腔(11)的内壁可拆卸连接。
10.根据权利要求9所述的灭火机器人,其特征在于,所述灭火机器人还包括检修门(100),所述检修门(100)可转动地设置在所述承载平台(10)上,以开闭所述安全腔(11)。
技术总结
本发明提供了一种灭火机器人,包括:承载平台;灭火装置,设置在承载平台的上方,用于喷洒灭火介质;运动装置,设置在承载平台的下方,用于带动承载平台运动;支撑结构,固定设置在承载平台的下方,且位于运动装置的外部;护板,在运动装置的外部遮挡运动装置;快拆装置,护板通过快拆装置与支撑结构可拆卸连接;快拆装置包括承载体和设置在承载体上的拆卸结构,承载体的一端的内部具有配合孔,支撑结构的一端伸入配合孔内,并通过拆卸结构与承载体可拆卸连接;承载体的另一端与护板固定连接。本发明通过设置快拆装置,实现了灭火机器人两侧护板快速且便捷地拆卸,进而解决了护板以及转轮或履带清洁不便的问题,提高了灭火机器人的维护效率。
技术研发人员:陈明浩,陶良山,李俊林,胡海峰,郝俊,张继荣,李晨光,林旭东,杨元,刘守维,王国卫,高凯斌
受保护的技术使用者:国能神东煤炭集团有限责任公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!