一种适用于特高压变电站的协同灭火系统及方法与流程
本发明涉及消防,具体为一种适用于特高压变电站的协同灭火系统及方法。
背景技术:
1、特高压变电站在现代电力系统中起到关键枢纽作用,其中的特高压变压器因传输能量大、贮油量多,火灾风险十分突出。当前特高压站普遍配置了举高灭火机器人、消防炮等关键消防设备设施。对直流换流站来说,站内大多有4极阀组,按极ⅰ高-极ⅰ低-极ⅱ低-极ⅱ高的顺序设计布置,同极阀组变压器面对面布置,两组低端阀组背靠背布置。消防炮一般布置在换流变的正上方挑檐处,每台换流变至少有其上方左右两门对应的消防炮负责保护,对侧阀组同样布置有消防炮。
2、对交流变电站来说,变压器一般以a、b、c三相为一组,按线性排布,中间用防火墙隔开,消防炮布置在防火墙顶端。由于压缩空气泡沫扑灭油火的优异性能,当前特高压站消防炮大多将压缩空气泡沫作为主要灭火介质。为了监视变压器日常运行情况,在主变周围还安装了辅助监视摄像头。消防炮一般由主控制室内的远程琴台控制,举高机器人由手持终端控制,可以在火灾现场操作,二者在火情态势感知上均存在短板。
3、在处置特高压变压器火灾实战中发现,消防炮身本体自带的摄像头易被溅射压缩空气泡沫覆盖,加之绝缘油燃烧后火场浓烟密布,导致消防炮远程控制琴台上难以有效监视火场画面,亦无法根据火场情况及时调整炮口方向角度。
4、举高机器人和变压器辅助监视摄像头距离喷射的泡沫较远,可以观察到火情处置情况,但其与消防炮分属不同系统,在火情信息共享和灭火技战术协同配合上存在困难,须由工作人员用对讲机等通讯装置传递火情信息和操作指令,降低了处置效率,增大了误操作可能性,无法发挥全部装备实效。
5、因此,上述问题阻碍了特高压变压器火情的高效处置,多系统的协同灭火方法和控制策略亟需改进。
6、现有技术中,专利公开号为cn115554633a的发明专利,一种适用特高压换流站消防炮琴台自动识别控制方法及系统,针对发生火灾后,消防炮喷射泡沫液,导致该消防炮的摄像头被泡沫遮挡,无法判断消防炮喷射位置的问题,通过设置预置位对阀组左相和对阀组右相,用于同级对侧阀组发生火灾后能够对对侧相进行实时清晰监控,准确判断对侧消防炮的喷射位置及效果,辅助调节对侧消防炮灭火方位和方式,确保灭火有效。但是该方法有明显局限性,仅适用于特高压直流换流站,交流站变压器无对侧相,无法利用对侧相视频监控,实现对火情发展和处置的监视。
技术实现思路
1、本发明所要解决的技术问题在于:解决特高压变压器火灾高效处置的问题。
2、为解决上述技术问题,本发明提供如下技术方案:
3、一种适用于特高压变电站的协同灭火系统,包括:消防炮(100)、消防炮控制琴台、举高机器人(200)和互联通信模块;将消防炮(100)上的摄像头、举高机器人(200)上的摄像头以及站内辅助监控系统组成多路视频信号,并将所述多路视频信号耦合,以及通过所述互联通信模块传输到所述消防炮控制琴台和所述举高机器人(200)的手持控制终端上共同显示和切换;且消防炮(100)的炮口方向角度控制命令接入所述手持控制终端内,使火灾现场,由一台所述手持控制终端同时控制举高机器人(200)、消防炮(100)两套灭火系统。
4、在本发明的一实施例中,所述站内辅助监控系统包括变压器运行辅助摄像头、故障相换流变对侧相摄像头以及其他位置安装的能够清晰监视火灾处置情况的摄像头。
5、在本发明的一实施例中,所述协同灭火系统还包括自动切换模块,所述多路视频信号耦合由所述自动切换模块实现;所述自动切换模块针对每相变压器,依据实际情况预置对应的多路监控信号规则,形成规则列表,并写入所述自动切换模块系统程序。
6、在本发明的一实施例中,所述协同灭火系统还包括变压器火灾故障相定位模块,用于自动识别火情并定位到变压器所属相别,输出具体的故障相别信息,并与自动切换模块通信连接,当所述变压器火灾故障相定位模块输出故障相别信息,被所述自动切换模块接收后,从所述自动切换模块规则列表中查找确定所对应的监控信号源,并完成切换输出。
7、在本发明的一实施例中,若站内实际发生火灾的变压器相别与所述变压器火灾故障相定位模块输出相别不一致,工作人员能够手动调整真实故障相别,使所述消防炮控制琴台、所述手持控制终端输出画面同步调整至故障相的监视画面。
8、在本发明的一实施例中,当变压器火灾发生后,举高机器人(200)部署现场并就位后向所述互联通信模块发出已就位信号,所述互联通信模块获取举高机器人(200)的举高臂架(210)前端的摄像头监视信号,无线传输至所述消防炮控制琴台;同时所述站内辅助监控系统的监视信号和消防炮(100)上的摄像头信号也由所述互联通信模块传输至所述手持控制终端,从而实现多路双向同步监视功能。
9、在本发明的一实施例中,消防炮(100)的方向角度控制命令接入所述手持控制终端由灭火控制模块实现,所述灭火控制模块安装在所述手持控制终端内;当变压器火灾发生后,举高机器人(200)部署现场并就位后向,向所述灭火控制模块发出已就位信号;所述灭火控制模块与消防炮(100)的控制系统通信,获取控制权限,使消防炮(100)的水平、俯仰角度能够由所述手持控制终端调整。
10、在本发明的一实施例中,所述灭火控制模块与消防炮(100)的控制系统通信后,所述消防炮控制琴台和所述手持控制终端均能控制消防炮(100)的角度方向,且无冲突;当一方操作指令未结束时,另一方暂时无法控制消防炮(100)。
11、本发明还提供一种适用于特高压变电站的协同灭火方法,应用上述所述的适用于特高压变电站的协同灭火系统,包括以下步骤:
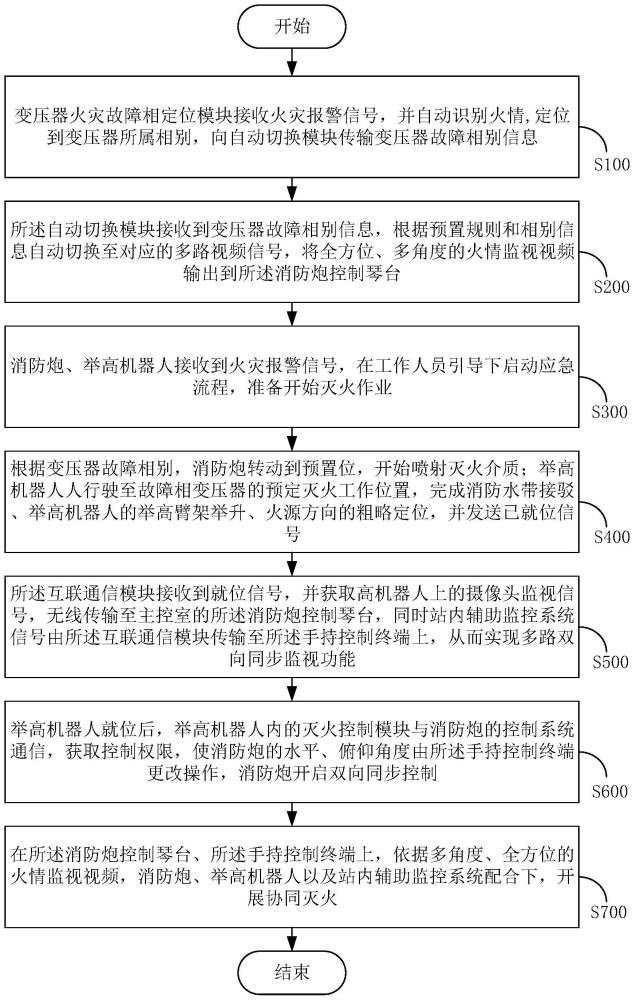
12、s100,变压器火灾故障相定位模块接收火灾报警信号,并自动识别火情,定位到变压器所属相别,向自动切换模块传输变压器故障相别信息;
13、s200,所述自动切换模块接收到变压器故障相别信息,根据预置规则和相别信息自动切换至对应的多路视频信号,将全方位、多角度的火情监视视频输出到所述消防炮控制琴台;
14、s300,消防炮、举高机器人接收到火灾报警信号,在工作人员引导下启动应急流程,准备开始灭火作业;
15、s400,根据变压器故障相别,消防炮转动到预置位,开始喷射灭火介质;举高机器人人行驶至故障相变压器的预定灭火工作位置,完成消防水带接驳、举高机器人的举高臂架举升、火源方向的粗略定位,并发送已就位信号;
16、s500,所述互联通信模块接收到就位信号,并获取高机器人上的摄像头监视信号,无线传输至主控室的所述消防炮控制琴台,同时站内辅助监控系统信号由所述互联通信模块传输至所述手持控制终端上,从而实现多路双向同步监视功能;
17、s600,举高机器人就位后,举高机器人内的灭火控制模块与消防炮的控制系统通信,获取控制权限,使消防炮的水平、俯仰角度由所述手持控制终端更改操作,消防炮开启双向同步控制;
18、s700,在所述消防炮控制琴台、所述手持控制终端上,依据多角度、全方位的火情监视视频,消防炮、举高机器人以及站内辅助监控系统配合下,开展协同灭火。
19、在本发明的一实施例中,所述变压器火灾故障相定位模块的工作流程包括:
20、s110,站内的火灾报警系统、消防炮摄像头火灾识别系统接入到变压器火灾故障相定位模块的输入侧,监控变压器运行情况并输出信号;
21、s120,发生变压器火灾,变压器火灾故障相定位模块接收到火灾报警信号;
22、s130,判断是否与站内实际火灾情况相符;若相符,变压器火灾故障相定位模块输出故障相别信息,若不相符,则工作人员手动修改真实故障相信息;
23、s140,所述变压器火灾故障相定位模块输出故障相别信息给所述自动切换模块,完成下一步协同灭火系统功能。
24、在本发明的一实施例中,在步骤s700中,协同灭火过程包括三个阶段:预置定位、同步调节、全覆盖喷射;
25、预置定位:消防炮(100)的控制系统设有预置位功能,根据历次火灾经验,对变压器网侧套管、中性点套管、油枕等高危位置预先设定好角度方向,能够在火灾时一键对位到上述位置;协同灭火的第一阶段是预置定位,根据火情监视画面,确定起火位置,使用一键定位功能将消防炮(100)调节至距离火源最近预置位,开启喷射压缩空气泡沫等灭火介质。
26、同步调节,举高机器人(200)部署就位,举高机器人(200)上的摄像头画面同步传输共享,手持控制终端获取消防炮(100)的控制权限;根据多路视频信号的火情态势监视画面,对着火点严重程度排序,安排灭火先后顺序;依据火焰面积大小制定灭火策略,将面积最大火焰排在首位,稍小面积的依次排序,面积相同时以消防炮(100)最近着火点优先;综合研判分析火源位置,以变压器网侧套管为首位危险源,依次分析分接开关、孔口、变压器器身;使用就地的机器人控制终端和远方的琴台双向同步调节炮口角度朝向,精准打击火源。
27、全覆盖喷射,灭火先后顺序和高危火源位置确定后,举高机器人(200)和消防炮(100)开展协同灭火,以多角度全覆盖喷射介质打击火源。对网侧套管、分解开关等点位火源,消防炮喷射模式应调整为直流喷射,对准起火套管和孔口处集中喷射;对于变压器器身撕裂导致的溢流火,在不确认器身撕裂位置前,消防炮喷射模式应调整为喷雾模式,对溢流火全覆盖打击。
28、与现有技术相比,本发明的有益效果是:
29、本发明针对特高压变压器火情处置现场透明度差问题,在现有消防炮控制琴台监视上做出改进,引入消防炮上的摄像头、变压器工况辅助监视摄像头可灵活部署举举高机器人的摄像头等多路视频监控源。将多路视频信号接入到自动切换模块,根据火灾故障变压器相别实现自动切换火情画面,并在消防炮控制琴台和所述举高机器人(200)的手持控制终端上共同显示和切换,,多路视频信号能多角度、全方位观察火情发展态势,为调整消防炮口朝向、布置灭火技战术提供有力决策支持。
30、本发明提出了特高压站举高机器人和消防炮的协同控制方法和灭火策略,通过将消防炮的方向角度控制命令接入所述手持控制终端内,使火灾现场,由一台手持控制终端同时控制举高机器人、消防炮两套灭火系统,能有效提高火情处置效率。在消防炮控制琴台和手持控制终端两侧,实现了对消防炮的双向控制和火灾现场监视画面的多路双向同步显示,大大提升了分属不同系统的消防设备的火情信息共享能力和协同处置能力。
- 还没有人留言评论。精彩留言会获得点赞!