臂架防干涉方法、装置及工程车辆与流程
本发明涉及工程机械,尤其涉及一种臂架防干涉方法、装置及工程车辆。
背景技术:
1、针对包括多节臂架的工程车辆,在作业过程中,该工程车辆通过展收和/或伸缩这多节臂架,来调整臂架姿态,以使最后一节臂架末端设置的作业装置(如喷射装置)到达指定作业位置(如灭火位置)。若未按合理顺序展收和/或伸缩臂架,则会导致不同臂架之间发生干涉,造成臂架的损坏。
2、现有的臂架防干涉方法是基于臂架上设置的倾角传感器所采集的角度信息,确定任意两节不同臂架的相远离端部之间的距离,进而确定不同臂架之间的相对位置关系,根据该相对位置关系和预设安全阈值,确定不同臂架端部之间的干涉风险情况,对应控制臂架运行/停止。在实际作业过程中,不同臂架之间的干涉姿态复杂多样,该方法具有一定的局限性,导致工程车辆的作业安全性较低。
技术实现思路
1、本发明提供一种臂架防干涉方法、装置及工程车辆,用以解决现有的臂架防干涉方法具有一定的局限性,导致工程车辆的作业安全性较低的缺陷,该方法基于第一距离和第二距离,针对工程车辆在实际作业过程中不同臂架之间的干涉风险情况,确定较为准确的第一风险结果,进而精确控制第一臂架和/或第二臂架运行,有效提高工程车辆的作业安全性。
2、本发明提供一种臂架防干涉方法,应用于工程车辆,所述工程车辆包括多节臂架,所述方法包括:
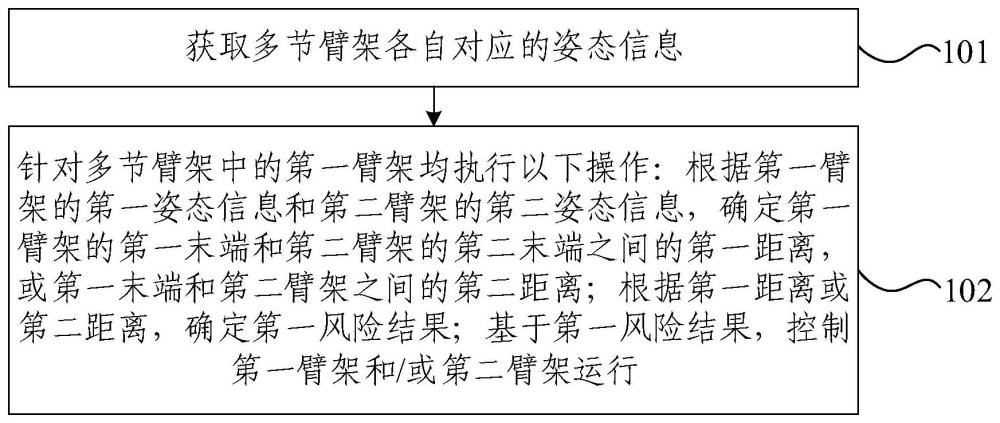
3、获取所述多节臂架各自对应的姿态信息;
4、针对所述多节臂架中的第一臂架均执行以下操作:根据所述第一臂架的第一姿态信息和第二臂架的第二姿态信息,确定所述第一臂架的第一末端和所述第二臂架的第二末端之间的第一距离,或所述第一末端和所述第二臂架之间的第二距离;根据所述第一距离或所述第二距离,确定第一风险结果;基于所述第一风险结果,控制所述第一臂架和/或所述第二臂架运行。
5、根据本发明提供的一种臂架防干涉方法,所述方法还包括:在所述多节臂架中的最后一节臂架的末端设有喷射装置的情况下,获取所述喷射装置对应的角度信息和空间位置信息;对所述多节臂架各自对应的姿态信息、所述角度信息和所述空间位置信息进行计算,得到所述喷射装置对应的喷射信息;根据所述喷射信息,确定第二风险结果;基于所述第二风险结果,控制所述多节臂架和/或所述喷射装置运行。
6、根据本发明提供的一种臂架防干涉方法,所述第一姿态信息包括第一臂架倾角信息和第一臂架长度信息,所述第二姿态信息包括第二臂架倾角信息和第二臂架长度信息;所述根据所述第一臂架的第一姿态信息和第二臂架的第二姿态信息,确定所述第一臂架的第一末端和所述第二臂架的第二末端之间的第一距离,或所述第一末端和所述第二臂架之间的第二距离,包括:根据所述第一臂架倾角信息和所述第一臂架长度信息,确定所述第一末端对应的第一坐标信息;根据所述第二臂架倾角信息和所述第二臂架长度信息,确定所述第二末端对应的第二坐标信息,以及所述第二臂架的首端对应的第三坐标信息;对所述第一坐标信息和所述第二坐标信息进行计算,得到所述第一距离;或,对所述第一坐标信息、所述第二坐标信息和所述第三坐标信息进行计算,得到所述第二距离。
7、根据本发明提供的一种臂架防干涉方法,所述根据所述第一距离或所述第二距离,确定第一风险结果,包括:根据所述第一距离或所述第二距离,结合预设最小安全距离和/或预设预警缓冲距离,确定所述第一风险结果,所述第一风险结果包括碰撞风险、干涉风险或没有风险,所述预设预警缓冲距离大于所述预设最小安全距离。
8、根据本发明提供的一种臂架防干涉方法,所述喷射信息包括喷射角度和喷射路径;所述根据所述喷射信息,确定第二风险结果,包括:获取车体在目标水平面的投影坐标信息;在所述喷射角度为负值的情况下,确定所述喷射路径与所述目标水平面的交点坐标信息;所述喷射角度为负值用于表征所述喷射装置向地面方向喷射;根据所述投影坐标信息和所述交点坐标信息,确定所述第二风险结果。
9、根据本发明提供的一种臂架防干涉方法,所述根据所述投影坐标信息和所述交点坐标信息,确定所述第二风险结果,包括:根据所述交点坐标信息及所述投影坐标信息对应的目标投影区域,结合预设最小安全距离和/或预设预警缓冲距离,确定所述第二风险结果,所述第二风险结果包括冲击风险、干涉风险或没有风险,所述预设预警缓冲距离大于所述预设最小安全距离。
10、根据本发明提供的一种臂架防干涉方法,所述基于所述第一风险结果,控制所述第一臂架和/或所述第二臂架运行,包括:在所述第一风险结果指示碰撞风险的情况下,控制所述第一臂架和/或所述第二臂架停止运行,并禁止所述第一臂架和/或所述第二臂架向碰撞方向继续运动,并允许所述第一臂架和/或所述第二臂架向碰撞相反方向继续运动;在所述第一风险结果指示干涉风险的情况下,控制所述第一臂架和/或所述第二臂架进行减速。
11、根据本发明提供的一种臂架防干涉方法,所述工程车辆还包括报警装置,在控制所述第一臂架和/或所述第二臂架运行之前,或,在控制所述多节臂架和/或所述喷射装置运行之前,所述方法还包括:在所述第一风险结果指示碰撞风险或干涉风险的情况下,或,在所述第二风险结果指示冲击风险或干涉风险的情况下,根据所述第一风险结果或所述第二风险结果的目标风险程度,对应控制所述报警装置进行报警提示。
12、本发明还提供一种臂架防干涉装置,应用于工程车辆,所述工程车辆包括多节臂架,所述装置包括:
13、获取模块,用于获取所述多节臂架各自对应的姿态信息;
14、处理模块,用于针对所述多节臂架中的第一臂架均执行以下操作:根据所述第一臂架的第一姿态信息和第二臂架的第二姿态信息,确定所述第一臂架的第一末端和所述第二臂架的第二末端之间的第一距离,或所述第一末端和所述第二臂架之间的第二距离;根据所述第一距离或所述第二距离,确定第一风险结果;基于所述第一风险结果,控制所述第一臂架和/或所述第二臂架运行。
15、本发明还提供一种工程车辆,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述臂架防干涉方法。
16、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述臂架防干涉方法。
17、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述臂架防干涉方法。
18、本发明提供的臂架防干涉方法、装置及工程车辆,通过获取多节臂架各自对应的姿态信息;针对多节臂架中的第一臂架均执行以下操作:根据第一臂架的第一姿态信息和第二臂架的第二姿态信息,确定第一臂架的第一末端和第二臂架的第二末端之间的第一距离,或第一末端和第二臂架之间的第二距离;根据第一距离或第二距离,确定第一风险结果;基于第一风险结果,控制第一臂架和/或第二臂架运行。该方法基于第一距离和第二距离,针对工程车辆在实际作业过程中不同臂架之间的干涉风险情况,确定较为准确的第一风险结果,进而精确控制第一臂架和/或第二臂架运行,有效提高工程车辆的作业安全性。
- 还没有人留言评论。精彩留言会获得点赞!