一种聚合物纤维人工肌肉连续自动加捻收卷装置及方法
1.本发明涉及聚合物纤维人工肌肉领域,具体涉及一种聚合物纤维人工肌肉连续自动加捻收卷装置及方法。
背景技术:
2.聚合物纤维人工肌肉最早由haines等人在《artificial muscles from fishing line and sewing thread》[j].(science,2014,343(6173):868-872)文章中提出。相比于其他螺旋型纤维人工肌肉,聚合物纤维人工肌肉具有应力应变大、能量密度高、稳定性强、价格便宜等优点,目前许多科研工作者正致力于其实际应用的研究。
[0003]
聚合物纤维人工肌肉可由聚合物纤维加捻制得,如申请号为cn202010932284.3的中国发明专利中所提到的,将纤维一端固定于电机轴上,另一端悬挂重物,用电机对其进行加捻直至纤维完全形成螺旋结构,这样螺旋型纤维人工肌肉就制备成功。
[0004]
申请号为cn201810635660.5的中国专利发明提出了一种聚酰胺纤维人工肌肉的定量制备测试装置与方法。该装置采用步进电机实现聚酰胺纤维的定量可控扭转;利用电加热管均匀,定量地加热聚酰胺纤维人工肌肉,并利用热成像仪实时监测、反馈;采用力传感器实时检测聚酰胺纤维人工肌肉所受载荷力,实现聚酰胺纤维人工肌肉的定量制备与力、温度响应特性的相关测试。
[0005]
然而上述专利所提及的纤维人工肌肉制备方法只能对有限长度的纤维进行加捻,并不能实现纤维的连续加捻。所以发明一种可对聚合物纤维进行连续自动加捻收卷的装置对聚合物纤维人工肌肉的应用具有十分重要的意义。
技术实现要素:
[0006]
本发明旨在解决上述传统纤维人工肌肉制备方法效率低且只能制备有限长度人工肌肉的限制,本发明提供了一种可对聚合物纤维进行连续自动加捻收卷,并且可以精确控制纤维人工肌肉加捻负载的装置。该装置大大提高了人工肌肉的制备效率,实现了聚合物纤维人工肌肉的自动化生产,对聚合物纤维人工肌肉的应用具有重大意义。
[0007]
为实现上述目的,本发明提供了一种聚合物纤维人工肌肉连续自动加捻收卷装置。该装置包括送丝机构、聚合物纤维、加捻机构、收卷机构、平移机构以及底板。所述送丝机构中滚动轴承ⅰ的中心轴与收卷机构中花键轴的中心轴水平对齐;所述聚合物纤维一般为尼龙纤维丝、涤纶纤维丝等;所述加捻机构、收卷机构和平移机构全部安装在底板上;加捻机构中的加捻机构衔接座固定在收卷机构中的前支撑座上;平移机构中的带座轴承与收卷机构中的花键轴进行过盈配合连接。平移机构中的导杆安装在收卷机构中的后支撑座上,并用螺母进行固定。
[0008]
进一步地,上述送丝机构包括力矩电机、力矩电机安装支座、集线筒ⅰ、送丝机构底板、送丝滑轮ⅰ、送丝滑轮ⅱ、滚动轴承ⅰ以及送丝平台。所述力矩电机通过力矩电机安装支座固定于送丝机构底板上;所述集线筒ⅰ安装于力矩电机输出轴上。所述送丝滑轮ⅰ、送丝滑
轮ⅱ安装于送丝平台上,通过两个送丝滑轮可防止纤维上的扭矩传到集线筒ⅰ上;所述滚动轴承ⅰ安装于送丝平台前端的孔中,纤维通过滚动轴承可有效减少纤维丝的磨损;所述送丝平台固定在送丝机构底板上。通过调节力矩电机输出力矩大小可以控制工作过程中纤维丝上的张力大小。
[0009]
进一步地,上述加捻机构包括同步带轮ⅰ、同步带ⅰ、绕线杆、同步带轮ⅱ、同步带轮支撑、滚动轴承ⅱ、加捻机构衔接座、步进电机安装支座ⅰ和步进电机ⅰ。所述同步带轮ⅰ安装在步进电机ⅰ输出轴上,并通过紧定螺钉进行限位防止发生相对滑动;所述步进电机ⅰ安装在步进电机安装支座ⅰ上;所述绕线杆一端攻有外螺纹与上述同步带轮ⅱ进行螺纹连接;所述同步带轮ⅱ安装在同步带轮支撑一端并用紧定螺钉防止发生相对转动;所述同步带轮支撑内侧安装有滚动轴承ⅱ并且为过盈配合;所述滚动轴承ⅱ内孔与加捻机构衔接座的轴进行过盈配合;所述加捻机构衔接座安装在所述收卷机构的前支撑座上;所述同步带安装在所述的两个同步带轮上。这样步进电机ⅰ通过带传动的方式使绕线杆转动,绕线杆带着聚合物纤维转动对其进行加捻操作。
[0010]
进一步地,上述收卷机构包括前支撑座、滚动轴承ⅲ、后支撑座、集线筒ⅱ、花键轴、花键轴套、滚动轴承ⅳ、同步带轮ⅲ、挡位环、同步带ⅱ、同步带轮ⅳ、步进电机安装支座ⅱ、步进电机ⅱ。所述集线筒ⅱ安装在所述花键轴的一端;所述花键轴套与所述滚动轴承ⅳ内孔进行过盈配合;所述滚动轴承ⅳ安装在所述前支撑座内,并且与前支撑座内孔为过盈配合;所述花键轴安装在所述花键轴套之中,并且可以进行轴向相对滑动;所述后支撑座内孔同样安装有滚动轴承,滚动轴承内安装有花键轴套,上述花键轴穿过所述花键轴套并且为间隙配合,且花键轴可相对花键轴套进行轴向滑动;所述花键轴上套有两个所述的挡位环并位于前后支撑座之间;所述同步带轮ⅲ内孔同样安装有花键轴套并且安装在花键轴上,位于两个挡位环之间;所述同步带轮ⅳ安装在步进电机ⅱ的输出轴上,并通过紧定螺钉进行限位防止发生相对滑动;所述步进电机ⅱ安装在步进电机安装支座ⅱ上;所述同步带ⅱ安装在同步带轮ⅲ、ⅳ上。步进电机ⅱ通过带传动的方式带动花键轴转动进而使集线筒ⅱ转动完成收卷工作。
[0011]
进一步地,上述平移机构包括导杆、带座轴承、平移衔接座、丝杆螺母、梯形丝杆、联轴器、步进电机安装支座ⅲ、步进电机ⅲ。所述导杆一端安装在所述平移衔接座中,另外一端旋入螺母用来限位;所述带座轴承安装在平移衔接座的左端;所述丝杆螺母安装在平移衔接座的右端;所述梯形丝杆旋入丝杆螺母之中;所述步进电机ⅲ安装在所述步进电机安装支座ⅲ上;所述联轴器连接步进电机ⅲ的输出轴与梯形丝杆。步进电机ⅲ驱动平移衔接座在导杆上进行滑动。
[0012]
本发明有以下有益效果:
[0013]
1.聚合物纤维可被从集线筒ⅰ上源源不断地拉出并对其进行加捻;
[0014]
2.通过调节力矩电机输出力矩大小可准确控制聚合物纤维上的张力也就是加捻负载;
[0015]
3.集线筒ⅱ在轴向上的转动使其可以对加捻完成的人工肌肉进行收卷;
[0016]
4.平移机构可以使集线筒ⅱ在轴向方向上往复移动,使人工肌肉均匀地收集在集线筒ⅱ上。
[0017]
5.整体装置结构简单、巧妙,操作便捷,可快速连续地完成聚合物纤维人工肌肉的
制备。
附图说明
[0018]
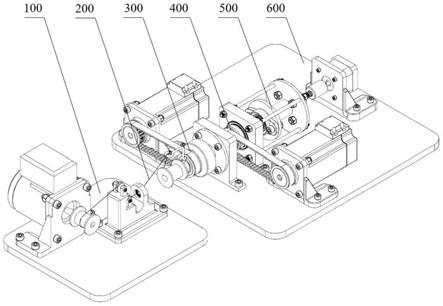
图1为本发明所述的聚合物纤维人工肌肉连续自动加捻收卷装置总装示意图;
[0019]
图2为本发明所述送丝机构示意图;
[0020]
图3为本发明所述加捻机构示意图;
[0021]
图4为本发明所述收卷机构示意图;
[0022]
图5为本发明所述平移机构示意图。
[0023]
图中:100-送丝机构;200-聚合物纤维;300-加捻机构;400-收卷机构;500-平移机构;600-底板;101-力矩电机;102-力矩电机安装支座;103-集线筒ⅰ;104-送丝机构底板;105-送丝滑轮ⅰ;106-送丝滑轮ⅱ;107-滚动轴承ⅰ;108-送丝平台;301-同步带轮ⅰ;302-同步带ⅰ;303-绕线杆;304-同步带轮ⅱ;305-同步带轮支撑;306-滚动轴承ⅱ;307-加捻机构衔接座;308-步进电机安装支座ⅰ;309-步进电机ⅰ;401-前支撑座;402-滚动轴承ⅲ;403-后支撑座;404-集线筒ⅱ;405-花键轴;406-花键轴套;407-滚动轴承ⅳ;408-同步带轮ⅲ;409-挡位环;410-同步带ⅱ;411-同步带轮ⅳ;412-步进电机安装支座ⅱ;413-步进电机ⅱ;501-导杆;502-带座轴承;503-平移衔接座;504-丝杆螺母;505-梯形丝杆;506-联轴器;507-步进电机安装支座ⅲ;508-步进电机ⅲ;
具体实施方式
[0024]
为充分了解本发明的目的、特征及功能,借由下述具体的实施方式,对本发明做详细说明。
[0025]
图1是本发明所述的聚合物纤维人工肌肉连续自动加捻收卷装置总装示意图。如图1所示,该装置包括送丝机构100聚合物纤维200、加捻机构300、收卷机构400、平移机构500以及底板600。所述送丝机构100中滚动轴承ⅰ107的中心轴与收卷机构400中花键轴405的中心轴水平对齐。所述聚合物纤维200一般为尼龙纤维丝、涤纶纤维丝等;所述加捻机构300、收卷机构400和平移机构500全部安装在底板600上;加捻机构300中的加捻连接座307固定在收卷机构400中的前支撑座401上;平移机构500中的带座轴承502与收卷机构400中的花键轴405进行过盈配合连接。平移机构500中的导杆501安装在收卷机构400中的后支撑座403上,并用螺母进行固定。
[0026]
图2是送丝机构100示意图。如图2所示,包括力矩电机101、力矩电机安装支座102、集线筒ⅰ103、送丝机构底板104、送丝滑轮ⅰ105、送丝滑轮ⅱ106、滚动轴承ⅰ107以及送丝平台108。所述力矩电机101通过力矩电机安装支座102固定于送丝机构底板104上;所述集线筒ⅰ103安装于力矩电机101输出轴上;所述送丝滑轮ⅰ105、送丝滑轮ⅱ106安装于送丝平台108上,通过两个送丝滑轮可防止纤维上的扭矩传到集线筒ⅰ103上;所述滚动轴承ⅰ107安装于送丝平台108前端的孔中,纤维通过滚动轴承ⅰ107可有效减少纤维丝的磨损;所述送丝平台108固定在送丝机构底板ⅰ104上。通过调节力矩电机ⅰ101输出力矩大小可以控制工作过程中纤维丝上的张力大小。所述集线筒ⅰ103及送丝平台108均为3d打印件。
[0027]
图3是加捻机构300示意图。如图3所示,包括同步带轮ⅰ301、同步带ⅰ302、绕线杆303、同步带轮ⅱ304、同步带轮支撑305、滚动轴承ⅱ306、加捻机构衔接座307、步进电机安
装支座ⅰ308和步进电机ⅰ309。所述同步带轮ⅰ301安装在步进电机ⅰ309输出轴上,并通过紧定螺钉进行限位防止发生相对滑动;所述步进电机ⅰ309安装在步进电机安装支座ⅰ308上;所述绕线杆303一端攻有外螺纹与上述同步带轮ⅱ304进行螺纹连接;所述同步带轮ⅱ304安装在同步带轮支撑305一端并用紧定螺钉防止发生相对转动;所述同步带轮支撑305内侧安装有滚动轴承ⅱ306并且为过盈配合;所述滚动轴承ⅱ306内孔与加捻机构衔接座307的轴进行过盈配合;所述同步带302安装在所述的两个同步带轮上。这样步进电机ⅰ309通过带传动的方式使绕线杆303转动,绕线杆303带着聚合物纤维转动对其进行加捻操作。其中绕线杆303、同步带轮支撑305以及加捻机构衔接座307为金属加工件,其他均为外购零件。步进电机ⅰ309采用57高速闭环步进电机可确保转速准确不丢步。
[0028]
图4是收卷机构400示意图。如图4所示,收卷机构包括前支撑座401、滚动轴承ⅲ402、后支撑座403、集线筒ⅱ404、花键轴405、花键轴套406、滚动轴承ⅳ407、同步带轮ⅲ408、挡位环409、同步带ⅱ410、同步带轮ⅳ411、步进电机安装支座ⅱ412、步进电机ⅱ413。所述集线筒ⅱ404安装在所述花键轴405的一端;所述花键轴套406与所述滚动轴承ⅳ407内孔进行过盈配合;所述滚动轴承ⅳ407安装在所述前支撑座401内,并且与前支撑座401内孔为过盈配合;所述花键轴405安装在所述花键轴套406之中,并且可以进行轴向相对滑动;所述后支撑座403内孔同样安装有滚动轴承,滚动轴承内安装有花键轴套,上述花键轴405穿过所述花键轴套并且为间隙配合,且花键轴405可相对花键轴套进行轴向滑动(此处的滚动轴承与花键轴套图中未示出);所述花键轴405上套有两个所述的挡位环409并位于前后支撑座401、403之间(图中只示出一个挡位环);所述同步带轮ⅲ408内孔同样安装有花键轴套并且安装在花键轴405上(此处的花键轴套图中未示出),位于两个挡位环409之间;所述同步带轮ⅳ411安装在步进电机ⅱ413的输出轴上,并通过紧定螺钉进行限位防止发生相对滑动;所述步进电机ⅱ413安装在步进电机安装支座ⅱ412上;所述同步带ⅱ410安装在同步带轮ⅲ408、同步带轮ⅳ411上。步进电机ⅱ413通过带传动的方式带动花键轴405转动进而使集线筒ⅱ404转动完成收卷工作。其中前后支撑座401、403、花键轴405及花键轴套406为金属加工件;集线筒ⅱ404和挡位环409为3d打印件,其余为采购件。
[0029]
图5是平移机构500示意图。如图5所示,包括导杆501、带座轴承502、平移衔接座503、丝杆螺母504、梯形丝杆505、联轴器506、步进电机安装支座ⅲ507、步进电机ⅲ508。所述导杆501安装在所述平移衔接座503中,导杆501一端旋入螺母用来限位;所述带座轴承502安装在平移衔接座503的左端;所述丝杆螺母504安装在平移衔接座503的右端;所述梯形丝杆505旋入丝杆螺母504之中;所述步进电机ⅲ508安装在所述步进电机安装支座ⅲ507上;所述联轴器506连接步进电机ⅲ508的输出轴与梯形丝杆505。步进电机ⅲ508驱动平移衔接座503在导杆501上进行滑动。其中导杆501、平移衔接座503为金属加工件,其他均为采购件。
[0030]
下面对本发明所述的一种用于聚合物纤维人工肌肉连续自动加捻收卷装置工作过程进行说明:
[0031]
首先从集线筒ⅰ103上引出聚合物纤维200,使纤维绕过两个送丝滑轮,即送丝滑轮ⅰ105;送丝滑轮ⅱ106,之后依次穿过滚动轴承ⅰ107、绕线杆303,最后系在集线筒ⅱ404上。力矩电机101上电并调节到合适的扭矩t。步进电机ⅰ309、步进电机ⅱ413、步进电机ⅲ508同时开始转动,步进电机ⅰ309驱动加捻机构300中的同步带轮ⅱ304转动,绕线杆303随同步带
轮ⅱ304转动且转速为ω1。绕线杆303带动聚合物纤维200转动并开始对其进行加捻;步进电机ⅱ413驱动收卷机构400中的花键轴405以ω2开始转动,集线筒ⅱ404随花键轴405一起转动。若ω1≠ω2,集线筒ⅱ404开始收卷人工肌肉;步进电机ⅲ508以ω3往复转动,通过梯形丝杆505、丝杆螺母504配合驱动平移衔接座503在导杆501上往复运动,带座轴承502带动花键轴405及集线筒ⅱ404往复平移使加捻好的聚合物纤维200均匀地绕在集线筒ⅱ404上,且此时应满足以下关系:
[0032][0033]
其中,d为聚合物纤维200直径,s为梯形丝杆505的导程。
[0034]
人工肌肉制备过程中一个重要的参数——加捻负载f满足以下关系:
[0035][0036]
其中,r1为集线筒ⅰ103的半径,t为力矩电机输出力矩。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1