集合器装置、纺纱头以及纺纱机的制作方法
本技术涉及一种用于织物带的集合器(condenser,集棉器)装置、包括这种装置的纺纱头以及包括这种纺纱头的纺纱机。
背景技术:
1、众所周知,在纺纱头中,用于形成带的纤维通过拉伸装置而变得平行且规则化,这些纤维必须在与主纺纱方向一致的预限定线性路径内适当地输送和引导。此外,为了防止由于拉伸辊造成的挤压而导致带变得过薄,并因此引起横向上的纤维相对于中心纤维分离、弯曲、卷曲和/或重叠的风险,有必要在一方面将纤维有序地聚集和集合,另一方面将纤维在一区域内的宽度尽可能压缩得较窄以限制后续纺纱步骤中的缠结缺陷。这些操作是由称为集合器的特殊装置进行的,由于上述原因,集合器在保持带的规则性和均匀性方面起着重要作用。
2、现有技术的集合器(示例如图1至图3所示)具有呈锥形并在带的前进方向上收缩的封闭截面,从而有利于纤维的逐渐聚集。然而,正如将在下文中更清楚地解释的,它们受到不同性质的多种技术缺陷的影响,最突出的是在纺纱的停止和重新启动步骤中控制带的能力差。
3、如果考虑使带的一部分在两对相邻的拉伸滚筒(以下统称为“轴”)之间,则在正常纺纱条件下,带由前轴拉动,前轴以比后轴更高的圆周速度拖动带,从而实现纤维的拉伸和平行化。当停止纺纱时,理论上两个轴应同时停止以避免在带中引起过度应变或应变不足,但实际上这是不可能的,因为轴通常由没有角位置传感器的电动步进电机驱动,而不存在执行反馈检查的任何具体可能性。
4、强制性地,拉伸轴在不同的时间停止,并且因此带在进入集合器的入口处,特别是在侧部(参见图1)且朝向机器外侧(参见图2)发生明显的鼓起。这种现象由于集合器的封闭截面阻止了带在横向区域的任何适应和自我调节的可能性的事实而进一步加剧。
5、应当注意的是,在纺纱头产生细密支数的特定情况下,当纺纱开始时,也可能发生带鼓起。在这种情况下,为了便于重新启动,通常首先减小拉伸比以增加引入纺纱单元中的纤维量。此外,在这种情况下,如果集合器的尺寸不合适,则会发生带堵塞。
6、当纺纱再次开始时,带的鼓起会立即导致集合器内的堵塞和阻塞,必须停止纺纱头,以允许操作员清除多余的累积纤维并恢复带的正确路径。很容易理解,如果忽略了这种不希望的边缘效应,可能会在带(从而在纱线中)中引起缺陷和不规则性,并且可能会严重损害纺纱头本身的功能性。
7、而且,集合器的封闭截面还会产生进一步的工艺缺点:事实上,带受力被推向且压靠集合器的壁,从而导致集合器壁的局部磨损现象。因此,传统的集合器通常在出口截面设置一对钢塞(如图1和图3所示),该对钢塞设计用于拦截带且同时防止塑料体磨损。这种额外的设备增加了集合器结构的复杂性,特别是由于需要将部件制成两个单独的零件,以便稍后连接,或者必须将销嵌入塑料主体中。
8、此外,出口截面的封闭迫使操作员在启动机器后准备带时,将带以物理方式插入每个集合器内,从而增加了劳动时间。如专利us2272787中所示,如果该截面通过在横向于带的方向上穿过的狭槽而敞开,也会出现这种情况。
9、然而,封闭截面使得操作员无法监控带的行进过程中发生的诸如不规则、堵塞、缠结等。
10、传统集合器的另一个缺点是其在改变纤维类型和带的支数方面缺乏灵活性。事实上,为了正确处理带,集合器的入口和出口截面必须与进入和离开集合器的带的对应支数(因此与对应的体积材料流率)相兼容。
11、因此,如果机器需要处理新的生产批次(例如,相同的纱线具有不同的支数),则必须首先逐个更换所有集合器,这显然会转变成一系列操作上的缺点,诸如装配到机器上的部件数量增加、生产成本增加、操作员承担的更大的组装、维护和存储成本,并且由于更换集合器本身所需的停机时间而导致机器生产率普遍降低。
12、在现有技术中,存在一些系统,诸如专利us2774995和us2813307中所示的系统,它们通过机械和气动作用相结合来执行集中过程,以便通过使纤维彼此粘附并防止其在侧部上不期望的扩展来使纤维聚集并密实。
13、然而,这些装置是不利的,因为它们需要真空发生装置以便成功地操作,并且还要吸收一定的电能。
14、此外,在这种装置中,带的横向通道截面实际上总是封闭的,这是因为集合器直接应用于拉伸带附近,因此会产生已经提到的在停止和重新启动过程中存在堵塞和阻塞带的风险。
15、专利gb705039描述了一种集合器,该集合器借助于通过带自身的前进运动而滚动的球来执行带的挤压和滚动动作。这种装置的主要缺点是带受到了机械应力,这会影响其规则性和质量。
16、还已知的是带横向截面的主动控制系统,诸如专利gb1131069中描述的那些,其中拉伸比与集合器由于带施加在集合器上的力而受到的位移成比例地变化。然而,这些设备也是特别限制的,因为它们必须设置有用于集合器的弹性组件的机械系统以及用于测量和控制偏转的电子设备;此外,这些集合器还使用优选封闭型的横截面,特别是漏斗的形式。
17、最后,还有其他主动式带宽度控制系统,诸如专利jp2009030180a中描述的那些,该主动式带宽度控制系统包括相对于带的标称位置对称地移动的一对臂。该系统相当复杂,由各种具有销和狭槽的机械部件形成,这些部件在纺织环境中容易经受灰尘、冲击和阻塞。所示的装置还预设使用马达且因此也预设使用控制器,该控制器适于根据用户必须输入机器中的特定参数来驱动马达,从而导致机器的机械和电子结构更复杂。
技术实现思路
1、因此,需要解决参考现有技术提到的缺点和限制。
2、特别是,鉴于前述限制,需要提供一种用于纺纱机的集合器,该集合器简单、经济、尺寸小、没有主动控制系统、自适应且独立于待加工的带的特征。
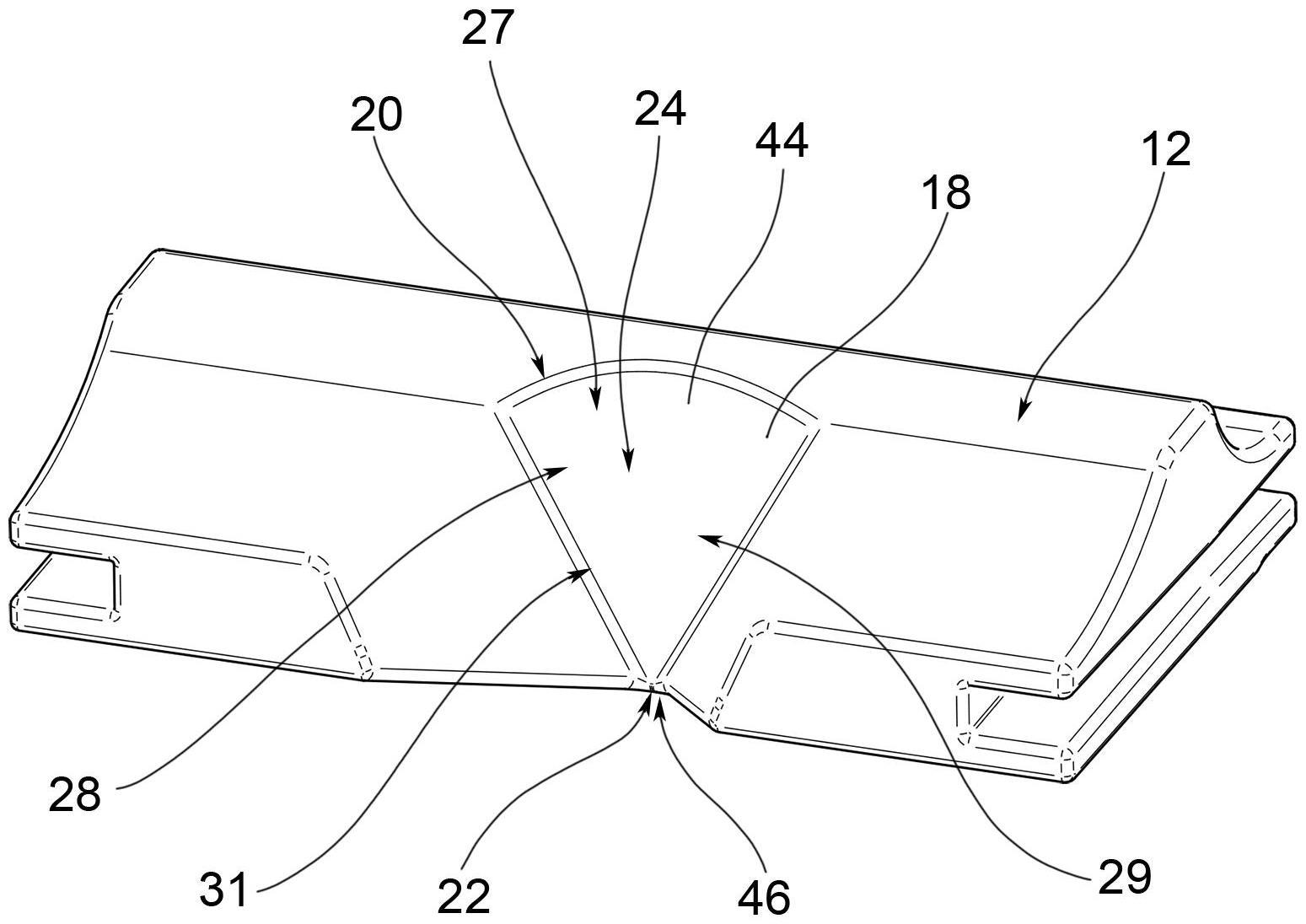
3、本实用新型一方面提供了一种集合器装置,该集合器装置是纺纱头的用于织物带的集合器装置,该集合器装置包括至少一个通道槽,该至少一个通道槽设置有嘴部、出口以及包括在嘴部和出口之间的滑动表面。滑动表面从嘴部朝向出口会聚。滑动表面设置有滑动底部和滑动侧壁,该滑动侧壁在相对于滑动底部的相反方向上彼此背离。
4、进一步地,集合器装置包括基本上与滑动底部相对的径向开口。
5、进一步地,集合器装置包括至少两个并排的通道槽。
6、进一步地,基于垂直于进入嘴部的滑动方向的截面平面至少一个通道槽的截面迹线为包含发散臂的基本上v形或u形形状。
7、进一步地,在发散臂之间限定40°至70°的第一角度,优选地该第一角度为57°。
8、进一步地,基于包含滑动方向且垂直于包含该滑动方向的中心线平面的平面,至少一个通道槽的截面迹线为具有会聚臂的基本上v形或u形形状。
9、进一步地,在会聚臂之间限定20°至60°的第二角度,优选地该第二角度为40°。
10、进一步地,至少一个通道槽是棱锥体的侧表面部分。
11、进一步地,棱锥体的侧表面部分包括至少两个面。
12、进一步地,棱锥体的侧表面部分包括三个面。
13、进一步地,至少一个通道槽是圆椎体表面部分。
14、进一步地,至少一个通道槽包括顶部表面部分,该顶部表面部分靠近棱椎体表面或圆椎体表面的顶点或者包含棱椎体表面或圆椎体表面的顶点。
15、进一步地,至少一个通道槽的滑动底部相对于进入嘴部的滑动方向倾斜一第三角度,第三角度为0°至10°,优选地该第三角度为5°。
16、进一步地,至少一个通道槽相对于包含进入嘴部的滑动方向的中心线平面对称。
17、进一步地,至少一个通道槽沿进入嘴部的滑动方向的长度为10mm至20mm,优选地该长度为15mm。
18、进一步地,在出口处,至少一个通道槽在垂直于进入嘴部的滑动方向的平面中具有的深度为8mm至18mm,优选地该深度为13mm。
19、进一步地,至少一个通道槽的边缘和/或顶点设置有配合部,配合部的半径为0mm至1.5mm,优选地该半径为0.5mm。
20、本实用新型另一方面提供了一种纺纱头,包括前述集合器装置。
21、本实用新型再一方面提供了一种纺纱机,包括至少一个前述的纺纱头。
22、借助于具有发散臂的双v形或双u形构造,集合器装置能够沿着两个方向压缩织物带,使得织物带的横向截面能够根据纺纱头的操作条件在侧部和正面自由地扩展,而不会在集合器本身的入口处产生堵塞和/或纤维块。
- 还没有人留言评论。精彩留言会获得点赞!