一种共面压电陶瓷片自动印银系统的制作方法
[0001]
本实用新型属于丝网印刷技术领域,具体涉及一种共面压电陶瓷片自动印银系统。
背景技术:
[0002]
压电陶瓷片是一种电子发音元件,使用时,在两片铜制圆形电极中间放入压电陶瓷介质材料,当在两片电极上面接通交流音频信号时,压电陶瓷片会根据信号的大小频率发生震动而产生相应的声音。
[0003]
在压电陶瓷片生产加工过程中,压电陶瓷片必须经过印银浆处理,即通过丝印机将银浆材料印刷至压电陶瓷片的表面,压电陶瓷片的上表面印刷第一电极层,下表面外周边设有外围电极层、第二电极层,第一电极层和外层电极层通过压电陶瓷片侧面的侧面电极层连接;现有的传统的压电陶瓷片的制作中,通常采用手工对压电陶瓷片的正面电极层和侧面电极层进行印刷,此种印刷方式效率低下,人工成本较高。
技术实现要素:
[0004]
实用新型目的:本实用新型目的在于针对现有技术的不足,提供一种共面压电陶瓷片自动印银系统,本实用新型能够对压电陶瓷片自动定位,依次对压电陶瓷片进行正面电极层和侧面电极层的印刷,提高工作效率,节省人工成本。
[0005]
实现本实用新型的技术方案是:
[0006]
本实用新型所述一种共面压电陶瓷片自动印银系统,包括搬运机构、储料机构、正面印刷机构、侧面移印机构和落料机构;所述储料机构内放置有压电陶瓷片,位于储料机构上的压电陶瓷片通过搬料机构搬运至正面印刷机构上,所述正面印刷机构包括定位机构、烘干机构和丝印机构,压电陶瓷片通过搬料机构搬运至定位机构上,位于定位机构上的压电陶瓷片移动至丝印机构进行正面电极印刷,并通过烘干机构对压电陶瓷片进行烘干,印有正面电极层的压电陶瓷片通过搬料机构搬运至侧面移印机构上,所述侧面移印机构包括移印定位机构和移印装置,所述搬料机构将压电陶瓷片搬运至移印定位机构上,通过移印装置对压电陶瓷片侧面电极印刷,位于移印定位机构上的压电陶瓷片通过搬运机构搬运至落料机构。
[0007]
优选地,所述储料机构包括至少一组料仓和上料机构;所述料仓呈一字排列设置与搬料机构上机械手的排列方式相同,所述料仓内放置有压电陶瓷片,每组料仓底部贯穿设有推杆,所述推杆通过上料机构将料仓内的压电陶瓷片向上推送,通过设置多组料仓可以实现一次对多个压电陶瓷片进行正面电极层和侧面电极层的印刷。
[0008]
优选地,所述上料机构包括第一连接板、第一直线滑台模组和第一驱动电机;所述料仓固定于工作板上,所述推杆的顶部穿过料仓底部,其底部通过第一连接板连接一体,所述第一连接板固定于第一直线滑台模组上的滑块上,所述第一直线滑台模组固定于工作板的底面,所述第一直线滑台模组通过第一驱动电机带动其上的第一连接板进行上下位移,
通过第一连接板的上下位移推送料仓内的压电陶瓷片位移;所述第一直线滑台模组沿其运动方向的侧边设有若干接近开关,通过接近开关来检测第一直线滑台模组上推杆的运动位置,进而判断储料机构中压电陶瓷片的剩余数量,及时补充储料机构中压电陶瓷片的数量。
[0009]
优选地,所述正面印刷机构的定位机构包括第一定位机构和第二定位机构;所述第一定位机构和第二定位机构上的压电陶瓷片的数目和排列方式与储料机构上压电陶瓷片的数目和排列方式相同,所述压电陶瓷片通过第一定位机构进行中心定位,再通过搬料机构将位于第一定位机构上的压电陶瓷片搬运至第二定位机构上,所述第二定位机构固定于第二直线滑台模组的滑块上,所述第二直线滑台模组通过第二驱动电机驱动第二定位机构进行直线位移,所述烘干机构和丝印机构位于第二定位机构直线位移的方向上。
[0010]
优选地,所述第一定位机构包括第一定位板、第一支撑板、吸附柱、第二连接板、第一滑轨组件和第二驱动气缸;所述第一支撑板固定于工作板上,所述第一支撑板的顶部侧面固定有第一定位板,所述第一定位板为长条状结构,其上设有与储料机构上压电陶瓷盘数目和排列方式相同的中心孔,所述中心孔上部为呈倒圆台型的穿孔,其下部为圆柱型的穿孔,每个中心孔内均穿设有吸附柱,吸附柱的底部固定于第二连接板上,所述第二连接板两端分别通过第一滑轨组件与第一支撑板侧面滑动连接,所述第二连接板的底部与第二驱动气缸连接,所述第二驱动气缸固定于工作板上,通过设置第一定位机构对压电陶瓷片进行重新排列。
[0011]
优选地,所述第二定位机构包括第一吸气板,所述第一吸气板上开设有与储料机构上压电陶瓷片数目和排列方式相同的第一吸气口,所述第一吸气板通过垫板固定于第二直线滑台模组的滑块上,所述第二直线滑台模组通过第二驱动电机带动其上第一吸气板运动,所述第二直线滑台模组的中部横跨设有烘干机构,其尾端设有丝印机构,所述丝印机构包括丝印版、丝网刮板和驱动机构,所述第二定位机构上的压电陶瓷片移动至丝印版的工作位下方,所述丝网刮板在驱动机构的驱动下移动并通过丝印版对压电陶瓷片进行正面电极印刷,印有正面电极层的压电陶瓷片在第二直线滑台模组上返回至烘干机构下方进行压电陶瓷片的烘干,位于第二定位机构上的压电陶瓷片通过一工作线自动完成压电陶瓷片的正面电极层的印刷和烘干处理,将印有正面电极层的压电陶瓷片进行烘干处理使第三搬料机械手搬运压电陶瓷片时,不会损坏压电陶瓷片上表面上印好的正面电极层。
[0012]
优选地,所述移印定位机构包括定位组件和定位滑动装置;所述定位组件对压电陶瓷片进行定位,所述定位组件固定于定位滑动装置上,所述移印装置包括移印组件、旋转组件和竖向移动装置;所述移印组件包括移印头和旋转板,所述移印头固定于旋转板端部,所述旋转板固定于旋转组件上,所述旋转组件固定于竖向移动装置上,所述移印头上下旋转时对压电陶瓷片侧面涂刷银浆。
[0013]
优选地,所述定位组件包括第二吸气板、第二定位板、第四驱动气缸、安装板,所述第二吸气板固定于安装板顶部,所述第二吸气板呈条状结构,其上设有与储料机构上压电陶瓷盘数目和排列方式相同的第二吸气口,每个第二吸气口上吸附有一压电陶瓷片,所述第二吸气板上设有第二定位板,位于第二吸气口一侧的第二定位板上设有与第二吸气口数目相同的v型槽,所述第二定位板的另一侧与第四驱动气缸连接,所述第四驱动气缸带动第二定位板相对于移印头进行前后位移,所述第二定位板推动压电陶瓷片向移印头侧位移,位于第二吸气口上的压电陶瓷片的待刷侧面电极层处朝向移印头侧设置,并外露于第二吸
气板,通过定位滑动装置调节与移印头的相对位置,通过旋转组件使移印头上的银浆涂刷至压电陶瓷片待刷侧面电极层处,通过设定压电陶瓷片外露于第二吸气板的大小来设置压电陶瓷片待刷侧面电极层的宽度,保证了压电陶瓷片侧面电极层宽度的一致性。
[0014]
优选地,所述移印头采用软性硅胶移印头,所述旋转组件采用回转气缸,所述移印头固定于旋转板端部,所述旋转板固定于回转气缸上,所述旋转板上的移印头移印侧与旋转组件旋转方向垂直;所述竖向移动装置包括气缸顶板、第一固定板、调节板和若干调节杆;所述气缸顶板和第一固定板之间均布固定调节杆,所述调节杆上穿设有调节板,所述气缸顶板上固定有迷你气缸,所述迷你气缸的驱动轴穿过气缸顶板与调节板连接,所述旋转组件固定于调节板一侧,所述迷你气缸驱动调节板进行竖向上下位移,通过使软性硅胶移印头上粘附银浆,移印头位于最底端的下方设有银浆盒,银浆盒的设置方便移印组件连续多次进行压电陶瓷片的侧面电极层的涂刷工作,提高工作效率,移印头通过竖向移动装置向下移动粘附银浆盒内的银浆,移印头再通过竖向移动装置向上移动到设定位置,再通过旋转组件旋转实现压电陶瓷片侧面电极印刷。
[0015]
优选地,所述搬料机构包括第一搬料机械手、第二搬料机械手、第三搬料机械手、第四搬料机械手和第四支撑架;所述第一搬料机械手、第二搬料机械手、第三搬料机械手和第四搬料机械手均采用负压取料机械手,四组负压取料机械手位于第四支撑架的同一侧,并固定于同步移动装置上,所述同步移动装置同步带动四组负压取料机械手进行往复直线运动。
[0016]
进一步地,所述第一搬料机械手将储料机构上的压电陶瓷片搬运至正面印刷机构,所述第一搬料机械手吸附起压电陶瓷片时,其正对着第一搬料机械手上的压电陶瓷片内侧设有吹料板,所述吹料板固定于第四支撑架上,每个压电陶瓷片正对着吹料板处设有吹料口,正对着吹料板的储料机构外侧设有接料盒,所述吹料板将第一搬料机械手吸附的压电陶瓷片上多余的物料吹落至接料盒内,通过设置吹料板和接料盒,保证第一搬料机械手上的机械手每次均搬运一个压电陶瓷片,多余的压电陶瓷片通过吹料板吹至接料盒内,方便后期对压电陶瓷片的回收利用。
[0017]
本实用新型可根据实际需要来设定料仓的组数,根据一次印刷压电陶瓷片的数目来设定料仓的组数,其中正面印刷机构上的第一定位机构、第二定位机构、以及侧面移印机构上的定位组件上压电陶瓷片的数目和排列方式与储料机构上的相同,搬料机构的负压取料机械手同步运动,第一搬料机械手将料仓上的压电陶瓷片搬运至第一定位机构,与此同时,第二搬料机械手将位于第一定位机构上的压电陶瓷片搬运至第二定位机构上,与此同时,第三搬料机械手将位于第二定位机构上的压电陶瓷片搬运至定位组件上,与此同时,第四搬料机械手将位于定位组件上的压电陶瓷片搬运至落料机构上,其中储料机构中的料仓、第一定位机构、第二定位机构、定位组件和落料机构的相邻两部件的间距相同,通过同步移动装置同步带动四组负压取料机械手进行直线运动;位于第一定位机构上的压电陶瓷片通过吸附柱吸附压电陶瓷片在第一定位板上的中心孔上实现中心定位,使压电陶瓷片排列整齐,压电陶瓷片的中心位于同一直线上,压电陶瓷片经过第一定位机构定位后,通过第二搬料机械手将位于第一定位机构上的压电陶瓷片搬运至第二定位机构上,通过第二定位机构上的第一吸气板吸附压电陶瓷片,使压电陶瓷片保持静止,位于第二定位机构上的压电陶瓷片通过丝印机构进行正面电极印刷,再通过烘干机构对压电陶瓷片进行烘干处理,
最后使第二定位机构返回至初始位置,通过第三搬料机械手将压电陶瓷片搬运至定位组件上,位于定位组件上的压电陶瓷片通过移印组件实现侧面电极印刷,印刷完侧面电极层的压电陶瓷片通过第四搬料机械手搬运至落料机构,完成整个系统的工作。
[0018]
采用了上述技术方案,本实用新型具有以下的有益效果:
[0019]
(1)本实用新型通过机械化设置搬料机构、储料机构、正面印刷机构、侧面印刷机构和落料机构,从压电陶瓷片的上料到实现正面电极层和侧面电极层的印刷工作,使用机械化设置,一次印刷能够实现多个压电陶瓷片的印刷工作,提高压电陶瓷片的正面电极层和侧面电极层的印刷效率,节省人工成本。
[0020]
(2)本实用新型在正面印刷机构中设置第一定位机构,通过第一定位机构对待印刷的压电陶瓷片进行中心定位和重新排列,使压电陶瓷片排列整齐并使压电陶瓷片的中心位于同一直线上,保证压电陶瓷片在后期的正面印刷机构和侧面移印机构中保持队列一致,使压电陶瓷片的正面电极印刷至正确位置,以及使压电陶瓷片的侧面电极印刷至压电陶瓷片的同一方位。
[0021]
(3)本实用新型中的侧面移印机构设有移印组件和定位组件,根据定位组件来对压电陶瓷片进行定位,使压电陶瓷片待刷侧面电极层处朝向移印头并外露于吸气板,根据压电陶瓷片侧面电极层的宽度来确定压电陶瓷片外露于吸气板的大小,通过吸气板上的吸气口对压电陶瓷片吸附定位,再通过定位板上的v型槽前后移动定位压电陶瓷片的外圆轮廓,实现对压电陶瓷片的定位,该定位组件能够使压电陶瓷片保持位置不动,使压电陶瓷片的侧面电极层涂刷至同一位置处,保持位置一致性,再通过旋转组件旋转带动移印头对压电陶瓷片侧面涂刷银浆,移印头的一次涂刷工作,可以同时完成多个压电陶瓷片的侧面电极层涂刷,能够提高压电陶瓷片侧面电极层的涂刷效率,进而提高工作效率。
[0022]
(4)本实用新型中搬运机构根据实际工位需要设置四组负压取料机械手,通过四组负压取料机械手的重复工作,可快速地将需要搬运的压电陶瓷片搬运至下一工位上进行工作,使每个机构均处于工作状态,提高工作效率。
附图说明
[0023]
为了使本实用新型的内容更容易被清楚地理解,下面根据具体实施例并结合附图,对本实用新型作进一步详细的说明,其中:
[0024]
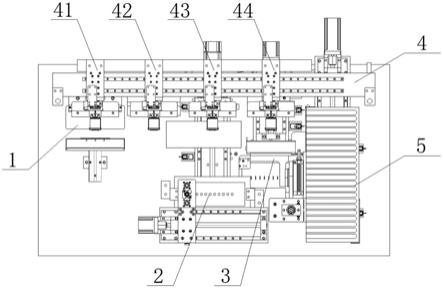
图1为本实用新型所述印银系统的俯视图;
[0025]
图2为本实用新型所述印银系统的立体结构示意图;
[0026]
图3为本实用新型所述储料机构的结构示意图;
[0027]
图4为本实用新型所述正面印刷机构的结构示意图;
[0028]
图5为本实用新型所述第一定位机构的结构示意图;
[0029]
图6为本实用新型所述第一定位板的结构示意图;
[0030]
图7为本实用新型所述第一定位板的剖视图;
[0031]
图8为本实用新型所述烘干机构的结构示意图;
[0032]
图9为本实用新型所述第一吸气板的结构示意图;
[0033]
图10为本实用新型所述烘干机构去掉罩壳后的结构示意图;
[0034]
图11为本实用新型所述丝印机构的结构示意图;
[0035]
图12为本实用新型所述侧面移印机构的结构示意图;
[0036]
图13为本实用新型所述定位组件、移印组件、旋转组件和竖向移动装置的结构示意图;
[0037]
图14为本实用新型所述定位组件和定位滑动装置的结构示意图;
[0038]
图15为本实用新型所述银浆盒的结构示意图;
[0039]
图16为本实用新型所述取料机构和落料机构的结构示意图;
[0040]
图17为本实用新型所述落料机构的结构示意图。
[0041]
图中,1-储料机构,11-料仓,12-推杆,13-第一连接板,14-第一直线滑台模组,15-第一驱动电机,16-吹料板,17-接料盒,18-第一驱动气缸,2-正面印刷机构,21-第一定位机构,211-第一定位板,212-第一支撑板,213-吸附柱,214-第二连接板,215-第一滑轨组件,216-第二驱动气缸,22-第二定位机构,221-第一吸气板,23-第二直线滑台模组,24-第二驱动电机,25-烘干机构,251-第一支撑架,252-烘干机,26-丝印机构,261-丝印版,262-第二支撑板,263-卡块,264-丝网刮板,265-第三驱动气缸,266-第三连接板,267-第三直线滑台模组,268-第三驱动电机,3-侧面移印机构,31-定位组件,311-第二吸气板,312-第二定位板,313-第四驱动气缸,314-安装板,32-移印组件,321-旋转板,322-移印头,33-旋转组件,331-回转气缸,34-竖向移动装置,341-调节板,342-带法兰直线轴承,343-调节杆,344-第一固定板,345-气缸顶板,346-迷你气缸,347-浮动接头,35-定位滑动装置,351-第四直线滑台模组,352-第四驱动电机,36-银浆盒,361-第二支撑架,362-上料盒,363-限位板,364-直线导轨,365-薄型气缸,366-第二固定板,4-搬料机构,41-第一搬料机械手,42-第二搬料机械手,43-第三搬料机械手,44-第四搬料机械手,45-第三支撑架,46-第二滑轨组件,47-双行程气缸,48-第四连接板,49-真空发生器吸头,491-流量监测器,492-滑台气缸,493-第三定位板,5-落料机构,51-接料板,52-第五直线滑台模组,53-第五驱动电机,6-接近开关,7-压电陶瓷片,8-工作板。
具体实施方式
[0042]
下面通过附图对本实用新型技术方案进行详细说明,但是本实用新型的保护范围不局限于所述实施例。
[0043]
实施例:一种共面压电陶瓷片7自动印银系统,压电陶瓷片7为待印刷正面和侧面的压电陶瓷片7;如附图1和2所示,本实施例中的自动印银系统安装于工作台的工作板8上,自动印银系统包括搬运机构、储料机构1、正面印刷机构2、侧面移印机构3和落料机构5;储料机构1内放置有压电陶瓷片7,位于储料机构1上的压电陶瓷片7通过搬料机构4搬运至正面印刷机构2上,正面印刷机构2包括定位机构、烘干机252构25和丝印机构26,压电陶瓷片7通过搬料机构4搬运至定位机构上,位于定位机构上的压电陶瓷片7移动至丝印机构26进行正面电极印刷,并通过烘干机构25对压电陶瓷片7进行烘干,印有正面电极层的压电陶瓷片7通过搬料机构4搬运至侧面移印机构3上,侧面移印机构3包括移印定位机构和移印装置,搬料机构4将压电陶瓷片7搬运至移印定位机构上,通过移印装置对压电陶瓷片7侧面电极印刷,位于移印定位机构上的压电陶瓷片7通过搬运机构搬运至落料机构5。
[0044]
本实施例中的储料机构1设置十组装有压电陶瓷片7的料仓11,根据储料机构1上的料仓11和自动印银系统来设定搬料机构4,如附图16和17所示,搬料机构4包括第一搬料
机械手41、第二搬料机械手42、第三搬料机械手43和第四搬料机械手44,第一搬料机械手41、第二搬料机械手42、第三搬料机械手43和第四搬料机械手44均采用负压取料机械手,四组负压取料机械手位于第三支撑架45的同一侧,并固定于同步移动装置上,同步移动装置同步带动四组负压取料机械手进行直线运动,其中同步移动装置包括第二滑轨组件46、双行程气缸47和第四连接板48,四组负压取料机械手均通过第二滑轨组件46与第三支撑架45滑动连接,第三支撑架45上铺设有两组第二滑轨组件46,第二滑轨组件46包括直线导轨,直线导轨上设有滑块,四组负压取料机械手位于第三支撑架45的同一侧,均通过板材固定于两滑块上,板材的一端与负压取料机械手固定连接,板材的底面固定于两滑块上,每组负压取料机械手通过第二滑轨组件46上的滑块沿着第三支撑架45的侧面做直线运动,每组负压取料机械手上的板材的另一端固定于第四连接板48上,第四连接板48的下方设有双行程气缸47,双行程气缸47固定于第三支撑架45上,双行程气缸47的两端伸出的驱动轴分别与第四连接板48固定连接,四组负压取料机械手在双行程气缸47的驱动下进行同步直线运动,本实施例中每个负压取料机械手根据储料机构1的设定均包括10个真空发生器吸头49、流量监测器491和滑台气缸492,10个真空发生器吸头49呈一字排列并与负压取料机械手的直线运动方向平行,每个真空发生器吸头49吸附一个压电陶瓷片7,成行设置的真空发生器吸头49固定于第三定位板493上,其顶部固定有回流装置,回流装置上设有流量监测器491,第三定位板安装于滑台气缸492上,滑台气缸492带动第三定位板进行竖向上下位移,滑台气缸492固定于第二滑轨组件46上的板材上,负压取料机械手通过滑台气缸492进行竖向上下位移吸附压电陶瓷片7,再通过同步移动装置同步带动负压取料机械手搬运压电陶瓷片7;负压取料机械手通过其上滑台气缸来调节真空发生器吸头的相对于工作板的高度,进而吸附待搬运的压电陶瓷片,吸附完压电陶瓷片后,再通过滑台气缸向上提升真空发生器吸头,达到预定高度后,再通过同步移动装置进行直线运动搬运压电陶瓷片到下一个工位的预定位置并放下压电陶瓷片,完成搬运工作,然后再通过同步移动装置带动负压取料机械手返回初始位置,进行下一轮搬运工作;。
[0045]
如附图3所示,本实施例中的储料机构1包括10组料仓11和上料机构;10组料仓11呈一字排列设置与第一搬料机械手41上的机械手的数目和排列方式相同,第一搬料机械手41上的机械手为真空发生器吸头49,用于吸附压电陶瓷片7,每组料仓11内放置有压电陶瓷片7,每组料仓11底部贯穿设有推杆12,推杆12通过驱动装置驱动将料仓11内的压电陶瓷片7向上推送,其中上料机构包括第一连接板13、第一直线滑台模组14和第一驱动电机15;料仓11固定于工作板8上,推杆12的顶部穿过料仓11底部,其底部通过第一连接板13连接一体,第一连接板13固定于第一直线滑台模组14上的滑块上,第一直线滑台模组14固定于工作板8的底面,第一直线滑台模组14通过第一驱动电机15带动其上的第一连接板13进行上下位移,通过第一连接板13的上下位移推送料仓11内的压电陶瓷片7位移;第一直线滑台模组14沿其运动方向的侧边设有若干接近开关6,通过接近开关6来监测推杆12的位置和行程,进而判断料仓11内剩余物料压电陶瓷片7的数目,能够及时补充料仓11内的压电陶瓷片7;为了保证第一搬料机械手41上的机械手每次均吸附一个压电陶瓷片7,在第一搬料机械手41吸附起压电陶瓷片7,正准备进行直线运动时,其正对着第一搬料机械手41上的压电陶瓷片7内侧设有吹料板16,吹料板16固定于第三支撑架45上,每个压电陶瓷片7正对着吹料板16处设有吹料口,正对着吹料板16的料仓11外侧设有接料盒17,吹料板16将第一搬料机
械手41吸附的压电陶瓷片7上多余的物料吹落至接料盒17内,接料盒17远离料仓11侧设有突出的挡板,挡板的设置高度高于吹料板16,并在接料盒17的底部安装第一驱动气缸18,第一驱动气缸18带动接料盒17相对于料仓11进行前后运动,第一搬料机械手41上吸附的压电陶瓷片7经吹料板16吹后搬运至正面印刷机构2。
[0046]
如附图4所示,正面印刷机构2包括定位机构、烘干机构25和丝印机构26;其中定位机构包括第一定位机构21和第二定位机构22,第一定位机构21和第二定位机构22上的压电陶瓷片7呈一字型排列,第一搬料机械手41将压电陶瓷片7放置于第一定位机构21上,经由第一定位机构21进行中心定位,第一搬料机械手41搬料完成后返回初始位置,如附图5所示,第一定位机构21包括第一定位板211、第一支撑板212、吸附柱213、第二连接板214、第一滑轨组件215和第二驱动气缸216;第一支撑板212固定于工作板8上,第一支撑板212的顶部侧面固定有第一定位板211,如附图6和7所示,第一定位板211为长条状结构,其上设有与第一搬料机械手41上的压电陶瓷盘排列方式相同的10个中心孔,中心孔上部为呈倒圆台型的穿孔,其下部为圆柱型的穿孔,每个中心孔内均穿设有吸附柱213,吸附柱213的底部固定于第二连接板214上,第二连接板214两端分别通过第一滑轨组件215与第一支撑板212侧面滑动连接,第一滑轨组件215包括固定于第一支撑板212上的直线滑轨,第二连接板214的两端分别固定于直线滑轨上的滑块上,第二连接板214沿第一滑轨组件215进行竖向方向的滑动,第二连接板214的底部与第二驱动气缸216连接,第二驱动气缸216固定于工作板8上,压电陶瓷片7被放于中心孔内,吸附柱213吸附压电陶瓷片7向下移动,压电陶瓷片7向下移动过程中,通过中心孔对压电陶瓷片7的中心进行重新排列,使压电陶瓷片7排列整齐并使压电陶瓷片7的中心位于同一直线上,保证压电陶瓷片7在后期的正面印刷机构2和侧面移印机构3中保持队列一致,使压电陶瓷片7的正面电极印刷至正确位置,以及使压电陶瓷片7的侧面电极印刷至压电陶瓷片7的同一方位;压电陶瓷片7经过第一定位机构21中心定位后,由第二搬料机械手42将第一定位机构21上的压电陶瓷片7搬运至第二定位机构22上,如附图8所示,第二定位机构22包括第一吸气板221,如附图9所示,第一吸气板221上开设有与第二搬料机械手42上吸附的压电陶瓷片7数目和排列方式相同的第一吸气口,第一吸气口的顶部边缘处设有环形凹槽,环形凹槽与第一吸气口的内部之间为凸起的环形隔块,在环形隔块上设置两流通口,流通口将环形凹槽与第一吸气口贯通,两流通口位于环形凹槽的同一直径上,环形凹槽的直径略小于压电陶瓷片7的直径,通过在第一吸气口上设置环形凹槽,通过流通口使环形凹槽和第一吸气口的气流贯通,增大压电陶瓷片7的吸附面积并增强压电陶瓷片7的稳定性,第一吸气板221通过垫板固定于第二直线滑台模组23的滑块上,第二直线滑台模组23通过第二驱动电机24带动其上滑块运动,第二直线滑台模组23上滑块的运动方向与负压搬料机械手的直线运动方向垂直,在第二直线滑台模组23的中部横跨设置烘干机构25,如附图10所示,烘干机构25包括第一支撑架251和烘干机252,烘干机252固定于第一支撑架251上,烘干机252外部设有开口向下的罩壳,烘干机252安装于罩壳内,烘干机252的烘干口呈条状朝下设置,烘干机252的烘干口覆盖完第二定位机构22上的压电陶瓷片7,第二定位机构22上的压电陶瓷片7移动至烘干机252烘干口的下方进行烘干,第二直线滑台模组23的尾端设有丝印机构26,如附图11所示,丝印机构26包括丝印版261、丝网刮板264和驱动机构,第二定位机构22上的压电陶瓷片7移动至丝印版261的工作位下方,丝网刮板264在驱动机构的驱动下移动并通过丝印版261对压电陶瓷片7进行正面电极印刷,丝印
机构26的驱动机构包括第三驱动气缸265、第三连接板266、第三直线滑台模组267、第三驱动电机268和第二支撑架361;丝印版261上银浆透过层的形状与第二定位机构22上压电陶瓷片7的正面电极相匹配,丝印版261的两端分别通过第二支撑板262固定于工作板8上,第二支撑架361的内侧均设有卡块263,卡块263上设有卡槽,丝印版261的两端分别伸入卡块263的卡槽内,丝印版261的银浆透过层上方设有丝网刮板264,丝网刮板264的顶部与第三驱动气缸265连接,第三驱动气缸265驱动丝网刮板264进行上下位移,第三驱动气缸265固定于固板上并通过第三连接板266固定于第三直线滑台模组267的滑块上,第三驱动电机268驱动第三直线滑台模组267上的滑块相对于丝印版261上的银浆透过层做直线运动,第三直线滑台模组267安装于第二支撑架361,第三直线滑台模组267中滑块的运动方向与第二直线滑台模组23中滑块的运动方向垂直,在第二直线滑台模组23的侧边上安装若干接近开关6,通过接近开关6来检测第二定位机构22的运动位置。位于第一定位机构21上的压电陶瓷片7经第二搬料机械手42搬运至第二定位机构22上,位于第二定位机构22的压电陶瓷片7在第二直线滑台模组23上移动至丝印机构26的工作处进行正面电极印刷,完成正面电极层印刷的压电陶瓷片7移动至烘干机252构25处进行烘干处理,烘干完成后第二定位机构22返回初始位置,经由第三搬料机械手43搬运至侧面移印机构3。
[0047]
如附图12和13所示,侧面印银装置包括移印组件32、旋转组件33、竖向移动装置34、压电陶瓷片7的定位组件31和定位滑动装置35;本实施例中的竖向移动装置34和定位滑动装置35固定安装于工作台的工作板8上,其中,移印组件32包括旋转板321和移印头322;旋转板321呈l型结构,包括两垂直设置的条形板,移印头322固定于旋转板321的一条形板上,移印头322的截面为上短下长的梯形结构和梯形结构顶部为凸起的光滑弧状结构,移印头322的底部固定于旋转板321的一条形板上,移印头322采用软性硅胶移印头322,软性硅胶移印头322能够防止压电陶瓷片7发生破损,保护压电陶瓷片7的完整,旋转板321固定于旋转组件33上,旋转组件33采用回转气缸331,旋转板321的另一条形板固定于回转气缸331上,使移印头322的移印侧与回转气缸331的旋转方向垂直并朝向外侧,回转气缸331旋转带动移印头322上下旋转移动,回转气缸331固定于竖向移动装置34上,竖向移动装置34带动旋转组件33进行竖向上下位移,在移印组件32上的移印头322粘附银浆,通过旋转组件33旋转带动移印头322对压电陶瓷片7侧面涂刷银浆;如附图13所示,本实施例中的竖向移动装置34包括气缸顶板345、第一固定板344、调节板341和若干调节杆343;气缸顶板345和第一固定板344之间均布固定调节杆343,第一固定板344固定于工作台的工作板8上,调节杆343为四根,分别固定于气缸顶板345和第一固定板344的四角处,调节杆343上穿设有调节板341,调节杆343上均套设有带法兰直线轴承342,调节板341套设于带法兰直线轴线外圆周,并通过螺栓与带法兰直线轴承342固定连接,气缸顶板345上固定有迷你气缸346,迷你气缸346的驱动轴穿过气缸顶板345与调节板341连接,迷你气缸346位于气缸顶板345的中部,其通过浮动接头347与调节板341顶面中部固定连接,旋转组件33固定于调节板341一侧,即回转气缸331固定于调节板341上,将回转气缸331的旋转轴上套设固定连接板,连接板的一端固定于调节板341上,回转气缸331位于水平方向上,迷你气缸346驱动调节板341在调节杆343上进行竖向上下位移,移印头322上粘附银浆,通过旋转组件33旋转带动移印头322对压电陶瓷片7侧面涂刷银浆,正对着移印头322侧设有压电陶瓷片7的定位组件31和定位滑动装置35,如附图14所示,定位组件31安装于定位滑动装置35上,定位滑动装置35带动定位组
件31正对着移印头322进行前后位移,定位组件31包括第二吸气板311、第二定位板312、第四驱动气缸313、安装板314,第二吸气板311固定于安装板314顶部,第二吸气板311呈条状结构,平行于移印头322设置,第二吸气板311固定于安装板314上,安装板314固定于定位滑动装置35上,在第二吸气板311的上表面沿长度方向设有10个成行排列的第二吸气口,每个第二吸气口上均吸附放置有压电陶瓷片7,使压电陶瓷片7保持静止不动,位于第二吸气口上的压电陶瓷片7的待刷侧面电极层处朝向移印头322侧设置,并外露于第二吸气板311,压电陶瓷片7外露于第二吸气板311的部分根据压电陶瓷片7的侧面电极层的宽度进行设定,在第二吸气板311上设有第二定位板312,第二定位板312的长度与第二吸气板311相同,位于吸气口一侧的第二定位板312上设有与第二吸气口数目相同的v型槽,压电陶瓷片7位于第二定位板312的v型槽内,第二定位板312的另一侧连接有第四驱动气缸313,第四驱动气缸313固定于安装板314顶面上,第四驱动气缸313带动第二定位板312相对于压电陶瓷片7进行前后位移,第二定位板312上的v型槽前后移动定位压电陶瓷片7的外圆轮廓;位于第二吸气口上的压电陶瓷片7的待刷侧面电极层处朝向移印头322侧设置,并外露于第二吸气板311,通过定位滑动装置35调节与移印头322的相对位置,通过旋转组件33使移印头322上的银浆涂刷至压电陶瓷片7待刷侧面电极层处;定位滑动装置35包括第四直线滑台模组351和第四驱动电机352,安装板314固定于第四直线滑台模组351的滑块上,第四直线滑台模组351固定于工作台的工作板8上,第四直线滑台模组351上滑块的运动方向与第三搬料机械手43的直线运动方向垂直,使第四直线滑台模组351滑行轨道的位移方向正对着移印头322,第四驱动电机352驱动第四直线滑台模组351使安装板314在第四直线滑台模组351上滑动定位,在第四直线滑台模组351的滑行轨道侧设有若干接近开关6,接近开关6检测第四直线滑台模组351上滑块的位移位置,本实用新型事先设定好定位组件31和移印组件32的相对位置,通过第四直线滑台模组351上的接近开关6来检测定位组件31的位置;本实施例中通过第四驱动电机352驱动第四直线滑台模组351使定位组件31在第四直线滑台模组351上滑动定位,通过第四直线滑台模组351和第四驱动电机352的配合使用,能够使定位组件31更平稳地进行滑移,保持定位组件31上的压电陶瓷片7的稳定性,定位组件31通过第二定位板312和第二吸气板311对压电陶瓷片7进行定位,通过第四驱动气缸313来调节压电陶瓷片7在第二吸气板311上的相对位置,再通过第四直线滑台模组351来调节压电陶瓷片7相对于移印组件32的相对位置,该定位组件31能够使压电陶瓷片7保持位置不动,使压电陶瓷片7的侧面电极层涂刷至同一位置处,保持位置一致性;如附图15所示,为了使移印组件32更方便地粘附银浆,移印头322位于最底端时的下方设置银浆盒36,在定位滑动装置35和竖向移动装置34之间的工作板8上开设安装孔,银浆盒36位于安装孔下方,银浆盒36通过限位组件安装于限位板363顶面上,限位板363为长方体结构,其通过固定于限位板363边角处的4个第二固定板366固定于工作板8底部,银浆盒36正位于移印头322位于最底端时的下方,移印头322在竖向移动装置34的向下带动下伸入银浆盒36内粘附银浆,为了方便给银浆盒36内加入银浆,在限位板363的长边的两侧边上分别设有直线滑动导轨364,直线滑动导轨364上滑行设有第二支撑架361,第二支撑架361包括分别与直线滑动导轨364滑动连接的滑动板,两滑动板的底部位于限位板363的下方,并通过底板连接一体,两滑动板的顶部位于限位板363的上方,并通过上料板连接,在上料板的中部安装有银浆上料盒362,第二支撑架361底部的底板上安装有薄型气缸365,薄型气缸365的驱动轴通过浮动接头347与底板连
接,薄型气缸365固定于限位板363的底部,并通过驱动轴带动第二支撑架361在限位板363上进行来回位移,使上料盒362内的银浆均匀地放于银浆盒36内,银浆盒36位于移印组件32中移印头322位于最底端的下方,方便移印头322粘附银浆盒36内的银浆,快速完成移印头322粘附银浆,使粘附有银浆的移印头322去涂刷压电陶瓷片7,自动完成移印头322粘附银浆的操作,方便移印组件32连续多次进行压电陶瓷片7的侧面电极层的涂刷工作,提高工作效率,替代人工操作,节省人工成本。
[0048]
本实施例中侧面移印机构3的工作过程为,预先设定定位组件31和移印组件32的工作时的相对位置,通过上料盒362将银浆均匀地放入银浆盒36内,并设置好定位组件31上压电陶瓷片7的位置,使压电陶瓷片7待刷侧面电极层处朝向移印头322并外露于第二吸气板311,根据压电陶瓷片7侧面电极层的宽度来确定压电陶瓷片7外露于第二吸气板311的大小,通过第二吸气板311上的吸气口对压电陶瓷片7吸附定位,再通过第二定位板312上的v型槽前后移动定位压电陶瓷片7的外圆轮廓,同时,移印组件32中的移印头322位于竖向面,移印头322在竖向移动装置34的带动下,向下移动至装有银浆的银浆盒36内,移印头322伸入银浆盒36的银浆内,粘附银浆,粘有银浆的移印头322在竖向移动装置34的带动下,向上移动,移动至预先设定位置,再通过旋转组件33朝向压电陶瓷片7侧旋转,使粘有银浆的移印头322向上旋转将银浆涂刷至压电陶瓷片7待刷侧面电极层处,完成涂刷压电陶瓷片7的侧面电极层,然后通过定位滑动装置35带动压电陶瓷片7远离移印组件32,移印组件32向下旋转,此时,完成涂刷压电陶瓷片7侧面电极层,移印组件32继续循环重复上述工作;位于定位组件31上的压电陶瓷片7完成侧面电极印刷后,返回初始位置,再通过第四搬料机械手44将压电陶瓷片7搬运至落料机构5。
[0049]
如附图16所示,落料机构5包括接料板51、第五直线滑台模组52、第五驱动电机53和接近开关6;接料板51上表面平行设有若干放置压电陶瓷片7的凹槽,第四搬料机械手44将压电陶瓷片7搬运至接料板51上的凹槽内,接料板51固定于第五直线滑台模组52的滑块上,第五直线滑台模组52上的滑块运动方向与第四搬料机械手44的直线运动方向垂直,第五直线滑台模组52通过第五驱动电机53驱动其滑块上的接料板51进行移动,为了检测接料板51的运动位置,在第五直线滑台模组52的侧边上安装若干接近开关6,通过接近开关6来检测接料板51的运动位置,在接料板51上的压电陶瓷片7铺满后,停止整个印银系统的工作。
[0050]
本实用新型可根据实际需要来设定料仓11的组数,根据一次印刷压电陶瓷片7的数目来设定料仓11的组数,其中正面印刷机构2上的第一定位机构21、第二定位机构22、以及侧面移印机构3上的定位组件31上压电陶瓷片7的数目和排列方式与储料机构1上的相同,搬料机构4的负压取料机械手同步运动,第一搬料机械手41将料仓11上的压电陶瓷片7搬运至第一定位机构21,与此同时,第二搬料机械手42将位于第一定位机构21上的压电陶瓷片7搬运至第二定位机构22上,与此同时,第三搬料机械手43将位于第二定位机构22上的压电陶瓷片7搬运至定位组件31上,与此同时,第四搬料机械手44将位于定位组件31上的压电陶瓷片7搬运至落料机构5上,其中储料机构1中的料仓11、第一定位机构21、第二定位机构22、定位组件31和落料机构5的相邻两部件的间距相同,通过同步移动装置同步带动四组负压取料机械手进行直线运动;负压取料机械手通过其上滑台气缸来调节真空发生器吸头的相对于工作板的高度,进而吸附待搬运的压电陶瓷片,吸附完压电陶瓷片后,再通过滑台
气缸向上提升真空发生器吸头,达到预定高度后,再通过同步移动装置进行直线运动搬运压电陶瓷片到下一个工位的预定位置并放下压电陶瓷片,完成搬运工作,然后再通过同步移动装置带动负压取料机械手返回初始位置,进行下一轮搬运工作;位于第一定位机构21上的压电陶瓷片7通过吸附柱213吸附压电陶瓷片7在第一定位板211上的中心孔上实现中心定位,使压电陶瓷片7排列整齐,压电陶瓷片7的中心位于同一直线上,压电陶瓷片7经过第一定位机构21定位后,通过第二搬料机械手42将位于第一定位机构21上的压电陶瓷片7搬运至第二定位机构22上,通过第二定位机构22上的第一吸气板221吸附压电陶瓷片7,使压电陶瓷片7保持静止,位于第二定位机构22上的压电陶瓷片7通过丝印机构26进行正面电极印刷,再通过烘干机252构25对压电陶瓷片7进行烘干处理,最后使第二定位机构22返回至初始位置,通过第三搬料机械手43将压电陶瓷片7搬运至定位组件31上,位于定位组件31上的压电陶瓷片7通过移印组件32实现侧面电极印刷,印刷完侧面电极层的压电陶瓷片7通过第四搬料机械手44搬运至落料机构5,完成整个系统的工作。
[0051]
以上所述的具体实施例,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1