一种基于无人机的高空印刷装置的制作方法
1.本发明涉及一种基于无人机的高空印刷装置,属于机械技术领域。
背景技术:
2.无人驾驶飞机简称“无人机”(“uav”),是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器。随着无线通信系统的不断扩容,无人机、舰艇等载体上的设备不断趋于小型化、集成化。
3.目前无人机主要广泛应用于警用、城市管理、农业、地质、气象、电力、高空塔架、抢险救灾、视频拍摄等行业。目前由于人工攀爬印刷相关图案经常出现高空作业事故,因此,如何利用无人机在高空塔架等设备上印刷相关图案是目前迫切需要解决的问题。
技术实现要素:
4.鉴于现有技术中存在上述技术难点,本发明目的在于提出一种基于无人机的高空印刷装置,该装置是采用无人机在高空塔架等设备上印刷相关图案,能够很好地适用于人力不方便、极难或者无法到达的高空作业场合。
5.本发明解决其技术问题所采取的技术方案是:一种基于无人机的高空印刷装置,该装置包括印章1、印章腔体2、万向节3、力度调节旋钮4、无人机与印章摆正机构5、无人机与电磁阀连接件6、连接螺钉7、电磁阀8、电磁阀伸缩杆9、机器平衡调节滑键10、紧定螺钉11、调节滑块12、锂电池13和无线电接收器14。印章1和印章腔体2通过双面胶和过盈配合连接,便于更换印章图案。印章腔体2和万向节3通过螺纹连接。万向节3和电磁阀8通过螺纹连接。其中,力度调节旋钮4和无人机与印章摆正机构5为万向节零件。电磁阀8和万向节3通过电池阀上一端的螺纹与万向节连接。电磁阀8为外协件,其中,电磁阀伸缩杆9为电磁阀零件。无人机与电磁阀连接件6和电磁阀8通过连接螺钉7连接。无人机与电磁阀连接件6为自行设计。机器平衡调节滑键10和电磁阀8通过4个螺钉连接。调节滑块12在机器平衡调节滑键10上能够自由滑动,以调节机器的整体水平平衡,调节完成后,再通过紧定螺钉11固定。调节滑块12、锂电池13和无线电接收器14通过螺钉连接。
6.本发明高空印刷装置能够通过万向节自适应斜塔表面,即印章表面能够与铁塔表面相适应。当高空印刷装置靠近铁塔时,通过给电磁阀通电,完成盖章动作。
7.本发明整个印刷装置能够通过调节滑块12调节平衡。
8.有益效果:
9.1、本发明采用高空印刷装置印刷替代人工攀爬印刷,降低了高空作业事故率。
10.2、本发明提高了高空印刷的效率,降低高空印刷成本,并且消除了施工的安全隐患。
11.3、本发明能够适用于人力不方便、极难或者无法到达的高空作业场合。
附图说明
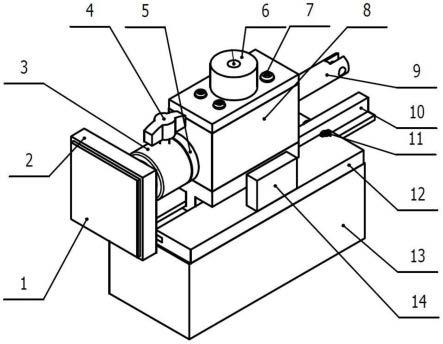
12.图1为本发明基于无人机高空印刷装置的结构示意图。
13.标识说明:1-印章,2-印章腔体,3-万向节,4-力度调节旋钮,5-无人机与印章摆正机构,6-无人机与电磁阀连接件,7-连接螺钉,8-电磁阀,9-电磁阀伸缩杆,10-机器平衡调节滑键,11-紧定螺钉,12-调节滑块,13-锂电池,14-无线电接收器。
14.图2为印章腔体与万向节的剖视图。
15.标识说明:2-印章腔体,3-万向节。
16.图3为印章腔体与万向节立体图。
17.标识说明:2-印章腔体,3-万向节。
18.图4为机器平衡调节滑键与电磁阀螺钉连接装配图。
19.标识说明:8-电磁阀,10-机器平衡调节滑键。
20.图5为机器平衡调节滑键与电磁阀连接螺钉连接立体图。
21.标识说明:8-电磁阀,10-机器平衡调节滑键。
22.图6为调节滑块与机器平衡调节滑键和螺钉连接装配图。
23.图7为调节滑块与机器平衡调节滑键和螺钉连接立体图。
24.标识说明:10-机器平衡调节滑键,11-紧定螺钉,12-调节滑块。
25.图8为本发明的机器平衡调节装置。
26.标识说明:10-机器平衡调节滑键,11-紧定螺钉,12-调节滑块,13-锂电池。
具体实施方式
27.为了更清楚地说明本发明的技术方案,下面将结合具体实施例和附图进行说明,显而易见地,下面描述中的实施例仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些实施例获得其他的实例。
28.如图1所示,本发明提供了一种基于无人机的高空印刷装置,该装置包括印章1、印章腔体2、万向节3、力度调节旋钮4、无人机与印章摆正机构5、无人机与电磁阀连接件6、连接螺钉7、电磁阀8、电磁阀伸缩杆9、机器平衡调节滑键10、紧定螺钉11、调节滑块12、锂电池13和无线电接收器14。印章1和印章腔体2通过双面胶和过盈配合连接,便于更换印章图案。印章腔体2和万向节3通过螺纹连接。万向节3和电磁阀8通过螺纹连接。其中,力度调节旋钮4和无人机与印章摆正机构5为万向节零件。电磁阀8和万向节3依靠电池阀上一端的螺纹与万向节连接。电磁阀8为外协件,其中,电磁阀伸缩杆9为电磁阀零件。无人机与电磁阀连接件6和电磁阀8通过连接螺钉7连接。无人机与电磁阀连接件6为自行设计。机器平衡调节滑键10和电磁阀8通过4个螺钉连接。调节滑块12在机器平衡调节滑键10上能够自由滑动,以调节机器的整体水平平衡,调节完成后,再通过紧定螺钉11固定。调节滑块12、锂电池13和无线电接收器14通过螺钉连接。
29.本发明高空印刷装置能够通过万向节自适应斜塔表面,即印章表面能够与铁塔表面相适应。当高空印刷装置靠近铁塔时,通过给电磁阀通电,完成盖章动作。
30.本发明整个印刷装置能够通过调节滑块12调节平衡。
31.本发明无人机的载重为5千克左右,中心轴线到扇叶边缘的水平距离为450毫米,在印章腔体2和万向节3之间需要增加一个伸缩杆,杆长约500毫米,其他不变。
32.如图2和图3所示,本发明的印章腔体2和万向节3通过螺纹连接,万向节3为外协件,且力度调节旋钮4和无人机与印章摆正机构5为万向节零件。
33.如图4和图5所示,本发明的机器平衡调节滑键10和电磁阀8通过4个螺钉连接。
34.如图6和图7所示,本发明的调节滑块12能够在机器平衡调节滑键10上自由滑动,以调节机器的整体水平平衡,调节完成后,再通过紧定螺钉11固定。
35.图8为本发明的机器平衡调节装置,其包括机器平衡调节滑键10、紧定螺钉11、调节滑块12和锂电池13。锂电池13为外协件,它与调节滑块12之间通过螺钉连接,其连接情况取决于外购的锂电池结构。
技术特征:
1.一种基于无人机的高空印刷装置,其特征在于,所述装置包括印章(1)、印章腔体(2)、万向节(3)、力度调节旋钮(4)、无人机与印章摆正机构(5)、无人机与电磁阀连接件(6)、连接螺钉(7)、电磁阀(8)、电磁阀伸缩杆(9)、机器平衡调节滑键(10)、紧定螺钉(11)、调节滑块(12)、锂电池(13)和无线电接收器(14),印章(1)和印章腔体(2)通过双面胶和过盈配合连接,印章腔体(2)和万向节(3)通过螺纹连接,万向节(3)和电磁阀(8)通过螺纹连接,力度调节旋钮(4)和无人机与印章摆正机构(5)为万向节零件,电磁阀(8)和万向节(3)通过电池阀上一端的螺纹与万向节连接,电磁阀(8)为外协件,电磁阀伸缩杆(9)为电磁阀零件,无人机与电磁阀连接件(6)和电磁阀(8)通过连接螺钉(7)连接,机器平衡调节滑键(10)和电磁阀(8)通过4个螺钉连接,调节滑块(12)在机器平衡调节滑键(10)上能够自由滑动,以调节机器的整体水平平衡,调节完成后,再通过紧定螺钉(11)固定,调节滑块(12)、锂电池(13)和无线电接收器(14)通过螺钉连接。2.根据权利要求1所述的一种基于无人机的高空印刷装置,其特征在于,所述装置通过万向节自适应斜塔表面,即印章表面能够与铁塔表面相适应,当高空印刷装置靠近铁塔时,通过给电磁阀通电,完成盖章动作。3.根据权利要求1所述的一种基于无人机的高空印刷装置,其特征在于,整个印刷装置通过调节滑块(12)调节平衡。4.根据权利要求1所述的一种基于无人机的高空印刷装置,其特征在于,印章腔体(2)和万向节(3)通过螺纹连接,万向节(3)为外协件,且力度调节旋钮(4)和无人机与印章摆正机构(5)为万向节零件。5.根据权利要求1所述的一种基于无人机的高空印刷装置,其特征在于,机器平衡调节滑键(10)和电磁阀(8)通过4个螺钉连接。6.根据权利要求1所述的一种基于无人机的高空印刷装置,其特征在于,调节滑块(12)在机器平衡调节滑键(10)上自由滑动,以调节机器的整体水平平衡,调节完成后,再通过紧定螺钉(11)固定。7.根据权利要求1所述的一种基于无人机的高空印刷装置,其特征在于,锂电池(13)为外协件,所述锂电池(13)和调节滑块(12)之间通过螺钉连接。
技术总结
本发明公开了一种基于无人机的高空印刷装置,包括印章(1)、印章腔体(2)、万向节(3)、力度调节旋钮(4)、无人机与印章摆正机构(5)、无人机与电磁阀连接件(6)、连接螺钉(7)、电磁阀(8)、电磁阀伸缩杆(9)、机器平衡调节滑键(10)、紧定螺钉(11)、调节滑块(12)、锂电池(13)和无线电接收器(14),印章(1)和印章腔体(2)通过双面胶和过盈配合连接,印章腔体(2)和万向节(3)螺纹连接,万向节(3)和电磁阀(8)螺纹连接,力度调节旋钮(4)和无人机与印章摆正机构(5)为万向节零件,电磁阀(8)和万向节(3)通过电池阀上一端的螺纹与万向节连接。本发明能够提高效率,降低成本,消除施工安全隐患。消除施工安全隐患。消除施工安全隐患。
技术研发人员:李岑 李勇 涂东耀 鲍伟 张海建 郭南初 费孔鹤 周兵
受保护的技术使用者:中邮建技术有限公司
技术研发日:2022.02.23
技术公布日:2022/6/4
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1