一种COB灯带喷码控制方法及系统与流程
本发明涉及智能控制,具体而言,涉及一种cob灯带喷码控制方法及系统。
背景技术:
1、cob(chip on board)灯带是一种led照明技术,它通过将多个led芯片直接贴装在一个导热基板上,形成了一种高效、均匀发光的照明带。这种布局与传统的smd(surface-mounted device)led技术相比,具有高密度发光、效率高、耐用性好的优点。对cob灯带进行喷码使其被标记上独特的生产批号、生产日期、或其他质量控制信息。可以追溯到特定的生产批次,从而快速定位和解决生产问题。并且高质量的喷码可以作为防伪标记,帮助识别正品,防止仿冒产品损害市场。
2、然而,当前喷码技术中通常由操作员手持喷码机对cob灯带进行喷码,手持喷码机的操作依赖于操作员的技能和经验,造成喷码质量差别较大,通常效率较低,特别是在大批量生产的情况下。长时间持续进行手持喷码可能导致操作员疲劳,从而进一步影响喷码的质量和效率。
3、因此,有必要设计一种cob灯带喷码控制方法及系统用以解决当前喷码技术中存在的问题。
技术实现思路
1、鉴于此,本发明提出了一种cob灯带喷码控制方法及系统,旨在解决当前cob灯带喷码技术中存在的大量依靠人力,喷码质量差别较大、效率低且容错率低的问题。
2、一个方面,本发明提出了一种cob灯带喷码控制方法,包括:
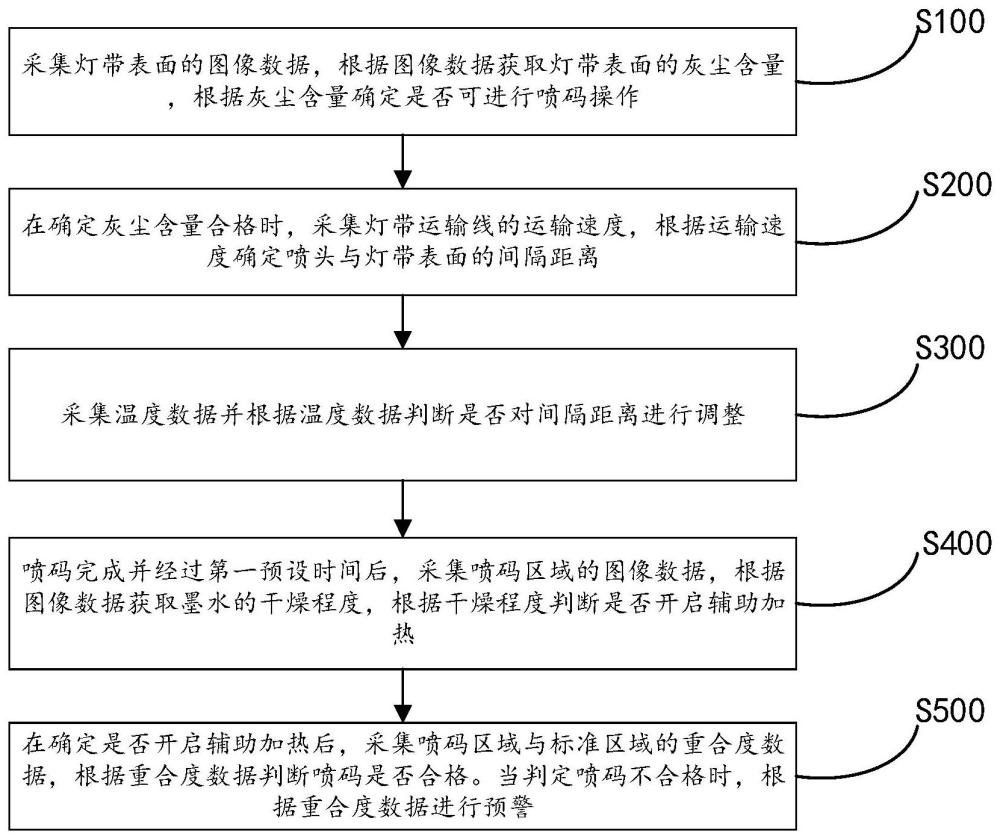
3、采集灯带表面的图像数据,根据所述图像数据获取所述灯带表面的灰尘含量,根据所述灰尘含量确定是否可进行喷码操作;
4、在确定所述灰尘含量合格时,采集灯带运输线的运输速度,根据所述运输速度确定喷头与所述灯带表面的间隔距离;
5、采集温度数据并根据所述温度数据判断是否对所述间隔距离进行调整;
6、喷码完成并经过第一预设时间后,采集喷码区域的图像数据,根据所述图像数据获取墨水的干燥程度,根据所述干燥程度判断是否开启辅助加热;
7、在确定是否开启所述辅助加热后,采集喷码区域与标准区域的重合度数据,根据所述重合度数据判断喷码是否合格;
8、当判定喷码不合格时,根据所述重合度数据进行预警。
9、进一步的,根据所述灰尘含量确定是否可进行喷码操作时,包括:
10、将所述灰尘含量h0与预先设定的灰尘含量阈值hmax进行比对,根据比对结果确定是否可进行喷码操作;
11、在第一比对结果下,判定所述灯带表面灰尘含量较少,可进行喷码操作;
12、在第二比对结果下,判定所述灯带表面灰尘含量较多,并根据所述灰尘含量h0确定除尘装置的运行功率;
13、其中,所述第一比对结果为h0≤hmax,所述第二比对结果为h0>hmax。
14、进一步的,所述根据所述灰尘含量h0确定除尘装置的运行功率时,包括:
15、获取所述灰尘含量h0与灰尘含量阈值hmax的含量差值δh,δh=h0-hmax,将所述含量差值δh分别与预先设定的第一预设含量差值δh1和第二预设含量差值δh2进行比对,δh1<δh2,根据比对结果确定所述除尘装置的运行功率;
16、在第一含量差值比对结果下,确定所述除尘装置的运行功率为第一预设运行功率p1;
17、在第二含量差值比对结果下,确定所述除尘装置的运行功率为第二预设运行功率p2;
18、在第三含量差值比对结果下,确定所述除尘装置的运行功率为第三预设运行功率p3;
19、其中,所述第一含量差值比对结果为δh≤δh1,所述第二含量差值比对结果为δh1<δh≤δh2,所述第三含量差值比对结果为δh>δh2;p1<p2<p3。
20、进一步的,根据所述运输速度确定喷头与所述灯带表面的间隔距离时,包括:
21、将所述运输速度s0分别与预先设定的第一预设速度s1和第二预设速度s2进行比对,s1<s2,根据比对结果确定所述间隔距离;
22、在第一速度比对结果下,确定所述间隔距离为第一预设间隔距离l1;
23、在第二速度比对结果下,确定所述间隔距离为第二预设间隔距离l2;
24、在第三速度比对结果下,确定所述间隔距离为第三预设间隔距离l3;
25、其中,所述第一速度比对结果为s0≤s1,所述第二速度比对结果为s1<s0≤s2,所述第三速度比对结果为s2<s0;l1>l2>l3。
26、进一步的,根据速度比对结果确定所述间隔距离为第i预设间隔距离li后,i=1,2,3,采集温度数据并根据所述温度数据判断是否对所述间隔距离进行调整时,包括:
27、将所述温度数据t0与预先设定的温度阈值tmax进行比对,根据比对结果确定是否对所述间隔距离li进行调整;
28、当t0>tmax时,判定温度较高,墨水易干燥,根据所述温度数据t0对所述间隔距离li进行调整;
29、当t0≤tmax时,判定不对所述间隔距离li进行调整。
30、进一步的,当根据所述温度数据t0对所述间隔距离li进行调整时,包括:
31、预先设定第一预设距离调整系数a1、第二预设距离调整系数a2和第三预设距离调整系数a3,且0<a1<a2<a3<1;获取所述温度数据t0与温度阈值tmax的温度差值δt,δt=t0-tmax;将所述温度差值δt与预先设定的第一温度差值δt1和第二温度差值δt2进行比对,δt1<δt2,根据比对结果确定距离调整系数对所述间隔距离li进行调整;
32、当δt≤δt1时,确定所述第三预设距离调整系数a3对所述间隔距离li进行调整,获取调整后的间隔距离li*a3;
33、当δt1<δt≤δt2时,确定所述第二预设距离调整系数a2对所述间隔距离li进行调整,获取调整后的间隔距离li*a2;
34、当δt2<δt时,确定所述第一预设距离调整系数a1对所述间隔距离li进行调整,获取调整后的间隔距离li*a1。
35、进一步的,根据所述干燥程度判断是否开启辅助加热时,包括:
36、将所述干燥程度g0与预先设定的干燥程度阈值gmax进行比对,根据比对结果确定是否开启所述辅助加热进行辅助干燥;
37、当g0<gmax时,干燥程度较低,确定开启所述辅助加热进行辅助干燥;
38、当g0≥gmax时,干燥程度较高,确定不开启所述辅助加热,不进行辅助干燥。
39、进一步的,根据所述重合度数据判断喷码是否合格时,包括:
40、将所述重合度数据c0与重合度最低阈值cmin进行比对,根据比对结果确定所述喷码是否合格;
41、当c0<cmin时,重合度较低,喷码不合格,并根据所述重合度数据c0进行预警;
42、当c0≥cmin时,重合度较高,喷码合格。
43、进一步的,当根据所述重合度数据c0进行预警时,包括:
44、获取所述重合度数据c0与所述重合度最低阈值cmin的偏差值z=1-c0/cmin;根据所述偏差值z进行预警;
45、当0.6<z≤1时,偏差严重,发出红色预警并关停喷码;
46、当0.2<z≤0.6时,偏差较大,发出橙色预警提醒维护;
47、当0<z≤0.2时,存在偏差,发出黄色预警提醒调整喷头。
48、与现有技术相比,本发明的有益效果在于:通过采集灯带表面的图像数据来检测灰尘含量,保证喷码操作在清洁的表面上进行,从而提高喷码质量。根据灯带运输线的速度自动调整喷头与灯带表面的间隔距离,确保了喷码的精确性和一致性,无论生产线的速度如何变化。同时,根据环境温度数据调整间隔距离,进一步优化喷码效果,考虑到温度对墨水干燥和喷射特性的影响。喷码完成后,采集喷码区域的图像数据以评估墨水干燥程度,根据需要启用辅助加热,加速干燥过程,减少因未干墨水造成的涂抹或模糊。通过比较喷码区域与标准区域的重合度数据,自动判断喷码质量,并在检测到不合格喷码时进行预警,以便及时纠正。
49、另一方面,本技术还提供了一种cob灯带喷码控制系统,用于应用上述cob灯带喷码控制方法,包括:
50、采集单元,被配置为采集灯带表面的图像数据,根据所述图像数据获取所述灯带表面的灰尘含量,根据所述灰尘含量确定是否可进行喷码操作;
51、处理单元,被配置为在确定所述灰尘含量合格时,采集灯带运输线的运输速度,根据所述运输速度确定喷头与所述灯带表面的间隔距离;
52、调整单元,被配置为采集温度数据并根据所述温度数据判断是否对所述间隔距离进行调整;
53、检查单元,被配置为喷码完成并经过第一预设时间后,采集喷码区域的图像数据,根据所述图像数据获取墨水的干燥程度,根据所述干燥程度判断是否开启辅助加热;
54、预警单元,被配置为在确定是否开启所述辅助加热后,采集喷码区域与标准区域的重合度数据,根据所述重合度数据判断喷码是否合格;
55、当判定喷码不合格时,所述预警单元根据所述重合度数据进行预警。
56、可以理解的是,上述cob灯带喷码控制方法及系统具备相同的有益效果,在此不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!