基于液体芯仿生细胞的人体耳石器官实体模型的制作方法
[0001]
本发明属于人体器官仿生技术领域,特别是一种基于液体芯仿生细胞的人体耳石器官实体模型。
背景技术:
[0002]
人体前庭系统中的耳石器官,包括椭圆囊和球囊,可以感知人体头部的直线加速度,用于保持身体平衡、维持稳定视觉,是人形重要的感觉器官。由于体积小、结构复杂、隐藏在头骨中,很难通过现有的技术手段,直接测量耳石器官内部的力学响应。而根据真实的人体耳石器官结构,用人工材料(或器件)代替相应的生物组织,设计制备人体耳石器官实体模型,可以较真实地观察和测量出人体耳石器官的工作机制,并进行各种生物体无法开展的物理实验,促进了解相关前庭疾病的病因。
[0003]
目前,人体耳石器官实体模型的结构如中国发明专利“仿耳石器官结构的直线加速度传感器”(申请号:201610271820.3公开日:2016.08.24)所述,包括刚性壳体、柔性弹性体,固定在刚性壳体底部的多根并联在一起的含金属芯压电纤维,粘接在柔性弹性体顶端的刚性元件,连接刚性元件和外部刚性壳体的弹性元件,将含金属芯压电纤维的对称电极用两根导线引出,两根导线分别连接在电荷放大器输入端的正负极上,将整个装置固定在激振器上,激振器上下振动时,弹性元件伸缩随之带动刚性元件,这时柔性弹性体会发生弹性形变,含金属芯压电纤维也会发生弹性形变,含金属芯压电纤维也会发生弹性形变,包裹在柔性弹性体里的含金属芯压电纤维会得到一个冲击信号,由于压电效应,压电材料上的表面电极有电荷发生,由于电极位置的不同,电极上产生的电荷或电压是不同的。这样我们通过采集电极上的电荷信号,经数据处理分析,即可得其加速度信息。
[0004]
上述直线加速度传感器的结构和人体的耳石器官结构有很大不同,柔性弹性体直接暴露在空气中。当有直线加速度作用时,依靠柔性弹性体及其上的固体颗粒的惯性,是柔性弹性体发生弯曲变形。而人体耳石器官中的感受器,即囊斑是浸泡在人体内淋巴液中的。头部受到直线加速度作用时,由于惯性力的作用,内淋巴液体向相反方向运动。依靠液体摩擦力的作用,囊斑产生弯曲变形,进而产生传感信号。因此,中国发明专利“仿耳石器官结构的直线加速度传感器”与人体耳石器官的结构不同,感知直线加速度的工作原理完全不同,其生物力学特性也有很大的区别,不能完全模仿人体耳石器官的工作机制。
技术实现要素:
[0005]
本发明的目的在于提供一种基于液体芯仿生细胞的人体耳石器官实体模型,精确模仿人体耳石器官的结构和工作机制。
[0006]
实现本发明目的的技术解决方案为:
[0007]
一种基于液体芯仿生细胞的人体耳石器官实体模型,包括圆盒状刚性壳体8,其上方设有十字交叉的连通管9,所述连通管9各端向下弯曲,与刚性壳体8侧壁密封固连;
[0008]
在所述刚性壳体8内设有圆柱状柔性弹性体5,所述柔性弹性体5与刚性壳体8圆心
重合,下端与刚性壳体8底部固定连接;
[0009]
所述刚性壳体8底部与柔性弹性体5连接处设有空隙,并以柔性弹性膜4将该空隙密封;
[0010]
还包括一底部及周边封闭、上部开口的底座3及固定于所述底座3底部的第一至四液体芯有机压电材料球体11、12、13、14;
[0011]
还包括一下部直径大、上部直径小的阶梯结构弹性杆2,所述阶梯结构弹性杆2下端固定连接在底座3底部,位于所述第一至四液体芯有机压电材料球体11、12、13、14之间,其上端穿过所述柔性弹性膜4密封于柔性弹性体5中;
[0012]
所述第一至四液体芯有机压电材料球体11、12、13、14周向均匀分布于阶梯结构弹性杆2周边,分别与阶梯结构弹性杆2接触;
[0013]
所述底座2上端与刚性壳体8底部固定连接,并使第一至四液体芯有机压电材料球体11、12、13、14中相间隔的两两球心连线与对应的连通管9轴线平行。
[0014]
所述连通管9与刚性壳体8形成的密闭空间充满液体7。。
[0015]
本发明与现有技术相比,其显著优点为:
[0016]
能精确模仿人体耳石器官的结构和工作机制:本发明完全模仿人体内耳中耳石器官的结构和功能,能够计算出直线加速度的大小和方向,以用于医学领域,研究人体的耳石器官的功能机制,也可以用于检测人体耳石器官的功能检查。也可以用于机器人领域,感知机器人头部的直线加速度方向和大小,进而保持机器人在运动中的清晰视觉,感知身体的姿态、维持身体平衡。
[0017]
下面结合附图和具体实施方式对本发明作进一步的详细描述。
附图说明
[0018]
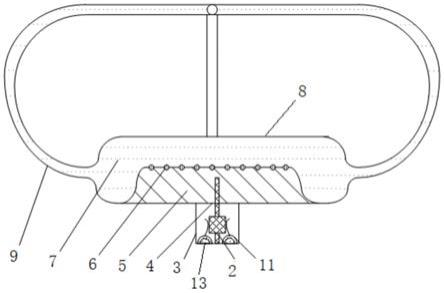
图1是本发明基于液体芯仿生细胞的人体耳石器官实体模型的结构示意图。
[0019]
图2是图1的俯视图。
[0020]
图3是图1底座内部结构详图。
[0021]
图4是图3中液体芯压电材料球体的竖向截面图。
[0022]
图中,11、12、13、14液体芯有机压电材料球体,2阶梯结构弹性杆,3底座,4柔性弹性膜,5柔性弹性体,6固体颗粒,7液体,8刚性壳体,9连通管,
[0023]
底板101,内层导电液体102,柔性有机压电材料壳体103,外层导电液体104,柔性弹性外壳膜105,外层电极引线106,内层电极引线107,弯曲刚性杆108。
具体实施方式
[0024]
如图1、2所示,本发明基于液体芯仿生细胞的人体耳石器官实体模型,包括圆盒状刚性壳体8,其上方设有十字交叉的连通管9,所述连通管9各端向下弯曲,与刚性壳体8侧壁密封固连;
[0025]
在所述刚性壳体8内设有圆柱状柔性弹性体5,所述柔性弹性体5与刚性壳体8圆心重合,下端与刚性壳体8底部固定连接;
[0026]
所述刚性壳体8底部与柔性弹性体5连接处设有空隙,并以柔性弹性膜4将该空隙密封;
[0027]
还包括一底部及周边封闭、上部开口的底座3及固定于所述底座3底部的第一至四液体芯有机压电材料球体11、12、13、14;
[0028]
还包括一下部直径大、上部直径小的阶梯结构弹性杆2,所述阶梯结构弹性杆2下端固定连接在底座3底部,位于所述第一至四液体芯有机压电材料球体11、12、13、14之间,其上端穿过所述柔性弹性膜4密封于柔性弹性体5中;
[0029]
如图3所示,所述第一至四液体芯有机压电材料球体11、12、13、14周向均匀分布于阶梯结构弹性杆2周边,分别与阶梯结构弹性杆2接触;
[0030]
所述底座2上端与刚性壳体8底部固定连接,并使第一至四液体芯有机压电材料球体11、12、13、14中相间隔的两两球心连线与对应的连通管9轴线平行。
[0031]
所述连通管9与刚性壳体8形成的密闭空间充满液体7。
[0032]
作为改进,所述柔性弹性体5上表面阵列排布有多个固体颗粒6。
[0033]
柔性弹性体5表面镶嵌的固体颗粒,由于密度高于柔性弹性体,增加了惯性力的大小,使测量更灵敏。
[0034]
如图4所示,所述第一液体芯有机压电材料球体11包括圆形底板101、半球壳状柔性有机压电材料壳体103和半球壳状柔性弹性外壳膜105;
[0035]
所述柔性有机压电材料壳体103开口端与底板101密闭连接,其内充满内层导电液体102,所述柔性弹性外壳膜105套装在所述柔性有机压电材料壳体103外,开口端与底板101密闭连接,在所述柔性弹性外壳膜105与柔性有机压电材料壳体103之间充满外层导电液体104;
[0036]
还包括弯曲刚性杆108,所述弯曲刚性杆108一端与柔性弹性外壳膜105固定连接,另一端与所述弹性杆2接触。
[0037]
优选地,所述弯曲刚性杆108一端与柔性弹性外壳膜105相切并固定连接,其另一端与所述弹性杆2相切并接触。
[0038]
一方面,可使弯曲刚性杆108的细微摆为柔性弹性外壳膜105感知,另一方面与弹性杆2接触更充分。不但提高了灵敏度,还增加了可靠性。
[0039]
还包括一端与内层导电液体102电连接的内层电极引线107、一端与外层导电液体104电连接的外层电极引线106。
[0040]
优选地,所述外层导电液体103和内层导电液体101为炭黑溶液、金属离子溶液或金属化合物溶液。
[0041]
所述第一至四液体芯有机压电材料球体11、12、13、14形状、结构相同。
[0042]
当整个球体受到外力作用,产生变形时,由于压电效应,在2层导电液体中将产生电荷;有电荷的大小,可以计算出外力的大小。
[0043]
本发明的工作原理详述如下:
[0044]
当整个装置受到直线加速度作用时,连通管9与刚性壳体8产生直线运动。而液体7具有惯性,向相反方向运动,和柔性弹性体5之间产生摩擦力作用;柔性弹性体5由于自身的惯性,也会向相反方向运动,但速度会慢于液体7的速度。柔性弹性体5表面的固体颗粒6,由于密度较高,增加了柔性弹性体5惯性力的大小;在液体7产生的摩擦力、柔性弹性体5及表面的固体颗粒6自身惯性力共同作用下,柔性弹性体5产生弯曲变形,压迫内部包裹的阶梯弹性杆2,使之产生弯曲变形;在底座内,阶梯弹性杆2压迫相应侧的第一至四液体芯有机压
电材料球体11、12、13、14中的一个或两个顶部弯曲刚性杆108,使对应的液体芯有机压电材料球体产生受压变形;由于液体芯有机压电材料球体中的外层导电液体103和内层导电液体101都是液体,具有体积不变的特性,将压迫柔性有机压电材料壳体103变形,由于压电效应,在外层导电液体103和内层导电液体101中将产生传感电荷,电荷的大小和所受压力成正比。根据外层导电液体103和内层导电液体101产生的传感电荷,可以计算出顶部弯曲刚性杆108所受的压力,进而计算出顶部弯曲刚性杆108和阶梯弹性杆2接触部分产生的位移。根据4个顶部弯曲刚性杆108和阶梯弹性杆2接触部分产生的位移,可以计算出阶梯弹性杆2的弯曲变形方向和大小,进而计算出柔性弹性体5的弯曲变形方向和大小,进而计算出液体7产生的摩擦力和柔性弹性体5的惯性力大小和方向,进而计算出整个装置受到的直线加速度的方向和大小。
[0045]
具体计算过程:4个液体芯有机压电材料球体产生电荷的大小——弯曲刚性杆的受力的大小和方向——弹性杆的弯曲变形的大小和方向——柔性弹性体受到的惯性力的大小和方向——整个装置受到的直线加速度的大小和方向。
[0046]
本发明完全模仿人体内耳中耳石器官的结构和功能,能够计算出直线加速度的大小和方向,可以用于医学领域,研究人体耳石器官的功能机制,也可以用于人体耳石器官的功能检查。也可以用于机器人领域,感知机器人头部的直线加速度方向和大小,进而保持机器人在运动中的清晰视觉,感知身体的姿态、维持身体平衡。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1