用于虚拟现实体验的模拟设备的制作方法
1.本发明涉及一种用于虚拟现实体验的模拟设备和移动这种模拟设备的方法。
背景技术:
2.本发明特别但不排他地用于与虚拟现实相关的技术领域,也就是说,真实场景的模拟。
3.具体地,本发明用于娱乐或训练活动,在这些活动中需要人与通过模拟系统再现的特定环境条件之间的交互。
4.在这种情况下,已知构造的模拟器包括座椅构件,该座椅构件旨在容纳使用者并且可旋转地安装在具有同心环(通常为三个)的结构内,同心环一个铰接在另一个内,以绕各自的轴垂直于彼此旋转,并且通常允许使用者根据赋予各个环的特定旋转指令在空间中围绕三个正交轴旋转。
5.专利文件us5060932a中描述了此类模拟器的示例。
6.us 2014/087334 a1涉及一种用于人的空间移动的装置。
7.然而,可以观察到,上述类型的已知模拟器可能受到一些限制。
8.第一个限制可以确定为这样的可能性,即由于各个环的预定方向,这种模拟器达到所谓的“万向节阻塞”条件,在这种情况下,使用者绕其中一个轴的自由旋转被阻止。
9.另一个限制可能被认为是难以接近座椅部件,这是由于模拟器的一个或多个构件的空间要求。
技术实现要素:
10.本发明的一个目的是提供一种模拟设备和移动这种模拟设备的方法,其在结构上和功能上配置为克服上述现有技术的至少一个限制。
11.该目的通过根据附加到本说明书的各个独立权利要求构造的模拟设备和用于移动这种模拟设备的方法来实现。
12.本发明的优选特征在从属权利要求中定义。
13.根据本发明的第一方面,模拟设备包括旨在定位在水平面中的平台和固定到平台并能够相对于平台绕第一旋转轴线旋转的旋转底座。当平台定位在水平面中,特别是固定在水平面上时,第一旋转轴线在竖直方向上延伸。
14.优选地,旋转底座由致动器致动,优选地由设置有电动机的机电致动器致动。
15.模拟设备还包括一可移动结构,可移动结构支撑于旋转底座上。旋转底座保持从平台所在的水平面升起的可移动结构。
16.可移动结构包括第一环和第二环,第一环固定,特别是铰接至旋转底座,能够相对于旋转底座绕垂直于第一旋转轴线的第二旋转轴线旋转,第二环相对于第一环在内部并且固定到第一环上并且能够绕垂直于第二旋转轴线的第三旋转轴线相对于第一环旋转。
17.具体地,第一环和第二环同心,第二环的半径小于第一环的半径。
18.优选地,旋转底座包括一对沿第一轴线的方向延伸的臂,并且第一环在其围绕第二旋转轴线的两个直径相对部分的区域中,通过相应的旋转对固定、特别是铰接至第一环的相应端部。
19.根据本发明的实施例,上述旋转对中的至少一个由致动器致动,优选地由设置有电动机的机电致动器致动。
20.优选地,第二环在其围绕第三旋转轴线的两个直径相对的部分的区域中通过相应的旋转对固定(特别是铰接)到第一环的相应的直径相对的部分。
21.根据本发明的实施例,上述旋转对中的至少一个由致动器致动,优选地由设置有电动机的机电致动器致动。
22.或者,第一环和第二环优选地相互连接以形成具有外环和内环的旋转推力轴承,其中第一环和第二环分别限定旋转推力轴承的外环和内环。内环可在外环上滑动以相对于外环绕第三旋转轴线旋转。在这种情况下,第一环和第二环位于同一平面内并且第二环优选地由致动器致动,更优选地由设置有电动机的机电致动器致动。
23.可移动结构还包括支撑元件,该支撑元件相对于第二环在内部并且固定,特别是铰接在第二环上,能够相对于第二环绕垂直于第三旋转轴线的第四旋转轴线旋转。
24.支撑元件优选地由致动器致动,更优选地由设置有电动机的机电致动器致动。
25.支撑元件包括用于容纳模拟设备的使用者的座椅。
26.特别地,可移动结构包括阻挡机构,该阻挡机构被提供以将使用者固定到他/她被容纳在其中的座椅,使得使用者在移动到支撑元件期间被固定地接合。
27.优选地,阻挡机构包括肩带或至少一根肩带/腰带,以便将容纳在座椅中的使用者牢固地固定到支撑元件。
28.模拟设备包括控制单元,该控制单元,特别是通过相应的上述致动器,可操作地连接到旋转底座、第一环、第二环和支撑元件。
29.控制单元还配置成,特别是通过相应的上述致动器,使旋转底座、第一环、第二环和支撑元件围绕各自的旋转轴线旋转,以便基于表示期望位置的控制信号移动容纳在座椅中的使用者至期望位置。
30.优选地,控制信号是无线电波信号或电信号或电子信号。
31.发现这些特征特别有利于通过将使用者从初始位置移动到期望位置来调整使用者的朝向。
32.四个旋转轴线的存在允许控制单元通过作用于旋转底座和/或第一环和/或第二环和/或支撑元件围绕各自的旋转轴线的旋转来移动模拟设备,通过防止占用关于模拟设备的不利配置,从而将容纳在座椅中的使用者从初始位置移向期望位置。
33.在本发明的上下文中,模拟设备的不利配置是万向节阻塞配置,在该配置中模拟设备发现不可能绕入射到第一轴和第二轴的轴线(也就是说,该轴线具有某个与第一轴和第二轴的共同点)旋转,不利配置或者是靠近万向节阻塞配置的配置,在该配置中四个旋转轴线在空间中的布置涉及能量消耗和/或机械力,这在万向节上模拟设备的一部分根据控制信号修改使用者在座椅中的位置方面尤为显著。
34.根据本发明的一个实施例,控制单元设置成围绕各自的旋转轴线使旋转底座、第一环、第二环和支撑元件旋转,使得模拟设备呈现趋向于最佳配置的配置,在该配置中上述
旋转轴线中的(任意)三轴基本正交,也就是说,第一、第二、第三、第四旋转轴线中的任意三个轴在容纳在座位上的使用者移向所需的位置的过程中基本相互正交。
35.在本发明的上下文中,如果每对这样的轴之间形成的角度在70
°
和110
°
之间,更优选在80
°
和100
°
之间,则三个旋转轴线基本上彼此正交。
36.发现该特征特别有利于防止模拟设备的不利配置,特别是它允许模拟设备沿着能量消耗和/或机械力方面的有效轨迹移动。
37.根据本发明的一个实施例,控制单元配置为使旋转底座、第一环、第二环和支撑元件中的至少一个旋转,所控制的旋转基于旋转底座、第一环、第二环和支撑元件中其余部件中的至少一个围绕各自的旋转轴线的旋转,从而防止模拟设备的阻塞情况,在该阻塞情况中第三轴和第四轴一个在第一轴的方向上延伸,另一个在第二轴的方向上延伸(万向节阻塞)。
38.在上述阻塞情况下,模拟设备无法绕入射到第一轴和第二轴的轴转动,从而失去了转动的自由度。
39.因此,本发明的这个特征尤其允许防止模拟设备的阻塞情况。
40.根据本发明的一个实施例,控制单元配置为基于第一环、第二环和支撑元件中的至少一个围绕各自的旋转轴线的旋转来旋转旋转底座,以防止阻塞情况。
41.由于模拟设备的构造原因,旋转底座不可避免地承受相对于第一环、第二环和支撑元件更大的惯性,特别是因为它支撑可移动结构的重量。因此,基于第一环、第二环和支撑元件中的至少一个的旋转而控制旋转底座的旋转的措施允许可移动结构的运动以足够的速度被控制,以便将被容纳的使用者在座椅中保持在期望位置,同时防止可移动底座的突然旋转变化。
42.在本发明的一实施例中,模拟设备包括第一传感器、第二传感器、第三传感器及第四传感器,分别连接于旋转座、第二环、第一环及支撑元件,以产生与这些元件围绕各个旋转轴线的旋转角度相关的各自的信号。
43.控制单元可操作地连接到传感器,以便基于控制信号和由传感器中的至少一个生成的信号将容纳在座椅中的使用者移向期望位置。
44.提供的传感器允许控制单元建立四个旋转轴线的空间位置,并因此旋转旋转底座、第一环、第二环和支撑元件,使得模拟设备的配置趋向于就容纳在座椅中的使用者朝向期望位置的运动而言的最佳配置。
45.根据本发明的一个实施例,模拟设备包括观察器。
46.观察器包括至少一个屏幕,该屏幕以这样的方式布置在模拟设备的座位区域中,即使得坐在座位上的使用者能够观看图像,特别是运动图像,这些图像由至少一个屏幕展示。
47.观察器可以固定到支撑元件上。
48.或者,观察器构造成护目镜或带有面罩的头盔的形式,以便能够被模拟设备的使用者佩戴。在这种情况下,护目镜的至少一个镜片或头盔的面罩配备有屏幕以显示图像,特别是显示运动图像。
49.提供的观察器允许在模拟设备的移动期间增加使用者在虚拟现实体验中的沉浸感。
50.根据本发明的一个实施例,支撑元件包括第三环,该第三环相对于第二环在内部并且固定(特别是铰接)到第二环,能够相对于第二环围绕第四旋转轴线旋转。
51.具体地,第三环与第二环同心,第三环的半径小于第二环的半径。
52.优选地,第三环在其沿着第四旋转轴线的两个直径相对部分的区域中,通过相应的旋转对,固定到第二环的相应直径相对的部分。
53.优选地,上述旋转对中的至少一个由支撑元件的致动器致动。
54.根据本发明的替代实施例,支撑元件包括在其两端之间纵向延伸的杆。杆通过其上述端部固定(特别是铰接)至第二环,能够相对于第二环绕第四旋转轴线旋转。
55.特别地,杆在其沿着第四旋转轴线的直径相对的纵向端部的区域中,通过相应的旋转对,固定到第二环的相应的直径相对的部分。
56.优选地,上述旋转对中的至少一个由支撑元件的致动器致动。
57.优选地,当第一环和第二环构成上述旋转推力轴承时,杆设置在模拟设备中。
58.从使用者可接近座椅的角度来看,该特征被发现特别有益,因为以这种方式获得的可移动结构不具有由第二环和/或第三环引起的空间要求。
59.根据本发明的实施例,支撑元件包括至少一个界定座椅的座椅构件。
60.根据本发明的实施例,座椅构件可以固定到第三环或固定到杆。
61.优选地,杆包括中心部分,该中心部分相对于其端部偏移并且座椅构件以这样的方式固定到该中心部分,即坐在座椅构件上的使用者的重心最大可能重合于由上述四个旋转轴线的交点限定的旋转中心。
62.在本发明的一实施例中,当模拟设备处于初始状态时,座椅构件处于直立位置,且第二旋转轴线、第三旋转轴线与第四旋转轴线相互正交。
63.在本发明的上下文中,如果相应座椅具有基本水平的范围,则座椅构件处于直立位置。优选地,座椅构件设置有靠背,当座椅构件处于直立位置时,该靠背沿基本竖直的方向从座椅延伸并且远离平台。
64.特别地,当模拟设备处于初始配置时,第三旋转轴线或第四旋转轴线在第一旋转轴线的方向上延伸。
65.根据本发明的一个实施例,模拟设备,特别是可移动结构,设置有控制装置,该控制装置布置在座椅区域中,使得被容纳在座椅中的使用者可以与控制装置交互。
66.控制装置可操作地连接到控制单元并且配置为根据使用者与控制装置的交互来生成表示被容纳在座椅中的使用者的期望位置的控制信号。
67.这些特征有利地允许容纳在座椅中的使用者直接或间接地控制可移动结构的移动。
68.根据本发明的一个实施例,控制装置包括摇杆,该摇杆可以由容纳在可移动结构的座椅中的使用者致动,并且控制信号与使用者操纵的摇杆的移动相关联。
69.根据本发明的替代实施例,控制装置可以在可移动结构的外部和/或布置在远离可移动结构的位置。因此,控制装置的使用者可能不位于座椅中,也就是说,使用者可能在活动结构控制装置的外部。在这种情况下,控制装置也可以设置有摇杆,但这将由控制装置的使用者而不是容纳在模拟设备的座位上的使用者致动。
70.根据本发明的一个方面,用于移动模拟设备的方法包括围绕各自的旋转轴线使旋
转底座、第一环、第二环和支撑元件旋转的步骤,以便基于表示期望位置的控制信号,移动容纳在可移动结构的座椅中的使用者至期望位置。
附图说明
71.从以下优选但非排他性实施例的详细描述中将更好地理解本发明的特征和附加优势,这些实施例参考附图通过非限制性示例的方式进行说明,其中:
72.·
图1是根据本发明第一实施例的模拟设备的示意图,
73.·
图2显示了不同配置的图1的模拟设备,
74.·
图3显示了处于阻塞状态的图1的模拟设备,
75.·
图4是根据本发明第二实施例的模拟设备的示意图,
76.·
图5显示了图4中不同配置的模拟设备,
77.·
图6显示了图4的模拟设备的附加配置,以及
78.·
图7显示了图4的模拟设备处于阻塞状态。
具体实施方式
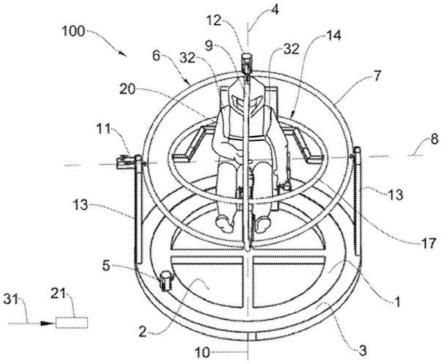
79.首先参考图1,根据本发明的第一实施例的模拟设备基本被指定为1000。
80.图1和图2分别显示了处于初始配置和第二配置的模拟设备100。
81.模拟设备100包括旨在定位在水平面2上的平台1和固定到平台1并能够相对于平台绕第一旋转轴线4旋转的旋转底座3。当平台1位于水平面2上时,第一旋转轴线4沿竖直方向延伸。旋转底座3由机电致动器5致动。
82.模拟设备100包括由旋转底座3支撑的可移动结构6。
83.可移动结构6包括第一环7和第二环9,第一环7固定到旋转底座3并且能够绕垂直于第一旋转轴线4的第二旋转轴线8相对于旋转底座3旋转,第二环9相对于第一环7在内部并且固定到第一环7上并且能够绕垂直于第二旋转轴线8的第三旋转轴线10相对于第一环7旋转。
84.第一环7和第二环9由各自的机电致动器11、12致动并且分别铰接至旋转座3的一对臂13,该对臂13垂直直立平行于第一旋转轴线4和第一环7。
85.可移动结构6包括支撑元件14,该支撑元件14相对于第二环9在内部并且固定到第二环9,能够相对于第二环9围绕垂直于第三旋转轴线10的第四旋转轴线15旋转(其在图2中可见)。支撑元件14优选地由机电致动器16致动。
86.参考图1至图3,支撑元件14包括第三环17,第三环17相对于第二环9在内部并且固定到第二环9上并且能够相对于第二环9围绕第四旋转轴线15旋转。第三环17铰接到第二环9上。
87.支撑元件14包括固定到第三环17的座椅构件18,并且座椅构件18限定用于接收模拟设备100的使用者20的座19。
88.可移动结构6还设置有用于将使用者20牢固地固定到座椅构件18的带32。
89.在图1所示的模拟设备100的初始配置中,座椅构件18处于直立位置。
90.模拟设备100还包括控制单元21,其可操作地连接到旋转底座3、第一环7、第二环9和支撑元件14,并且配置成使这些元件利用相应的机电致动器围绕各自的旋转轴线4、8、
10、15旋转,以便基于表示期望位置的控制信号31将容纳在座椅19中的使用者20移向期望位置。
91.图2示出了处于第二配置的模拟设备100,其中随着模拟设备100的移动,容纳在座椅19中的使用者20已经到达与图1中所示的初始位置不同的期望位置。
92.提供控制单元21以使旋转底座3、第一环7、第二环9和支撑元件14围绕各自的旋转轴线4、8、10、15旋转,使得模拟设备占据趋向于最佳配置的构造,其中旋转轴线4、8、10、15的任何三元组(triplet)在容纳在座椅19中的使用者20朝向期望位置的移动期间基本上彼此正交。
93.具体而言,控制单元21配置成基于第一环7、第二环9和支撑元件14围绕单独的旋转轴线8、10、15的旋转中的至少一个来旋转旋转底座3,以防止模拟设备100的阻塞情况,其中第三旋转轴线10和第四旋转轴线15一个在第一旋转轴线4的方向上延伸,另一个在第二旋转轴线15的方向上延伸。
94.为了将使用者20从图1所示且模拟设备100处于最佳配置(旋转轴线8、10、15形成正交轴的三元组)的初始位置移动到期望位置,在期望位置中使用者20向他/她的左侧旋转90
°
,控制单元21将提供对可移动结构6的旋转的控制并且使旋转底座3沿逆时针方向旋转90
°
,达到图2所示的模拟设备100的第二最佳配置(旋转轴线8、10、15仍然相互正交)。
95.图3还显示了处于所期望位置的使用者20,但是这种配置将在可移动结构6的与图1所示的模拟设备100的配置不同的旋转之后获得。然而,在这种情况下,模拟设备100将达到阻塞条件(第一旋转轴线4和第三旋转轴线10重合以及第二旋转轴线8和第四旋转轴线15重合)所以这种配置会通过控制单元21阻止,控制单元21将选择通过图2所示的移动到达使用者20的相同位置。
96.模拟设备100还包括第一传感器、第二传感器、第三传感器和第四传感器(图中未示出),它们分别连接到旋转座3、第二环9、第一环7和支撑元件14上,以便生成与这些元件围绕各自的旋转轴线4、8、10、15的旋转角度相关的各自的信号。控制单元21可操作地连接到传感器,以便基于控制信号31和由传感器中的至少一个产生的信号将容纳在座椅19中的使用者20移向期望位置。
97.可移动结构6还设置有控制装置24,其布置在座椅19的区域中,使得容纳在座椅19中的使用者20可以与其交互。
98.控制装置24可操作地连接至控制单元21,并配置为根据使用者20的指令相关的交互产生控制信号31。
99.具体而言,控制装置24为可产生控制信号的摇杆。
100.图1至图3进一步示出了由使用者20佩戴的观察器29。观察器29是带有护目镜的头盔,其配备有屏幕以显示图像,特别是运动图像,这允许在模拟设备100的移动期间增强使用者20在虚拟现实体验中的沉浸感。
101.图4至图7显示了本发明的模拟设备的第二个实施例,基本用101表示。
102.除非另有说明,否则模拟设备的第二实施例中与关于指定为100的模拟设备所描述的那些相对应的元件将用相同的数字指示。
103.模拟设备101与图1所示的不同之处在于,支撑元件14包括在其两端26、27之间纵向延伸的代替第三环17的杆25,并且第一环7和第二环9相互连接形成具有外环和内环的旋
转推力轴承,其中第一环7和第二环9分别限定旋转推力轴承的外环和内环。
104.杆25通过端部26、27固定到第二环9,能够绕第四旋转轴线15相对于第二环9旋转。
105.杆25包括中心部分28,该中心部分28相对于其两端部26、27偏移并且座椅构件18固定到该中心部分。
106.从容易接近座椅构件18的角度,本发明的该实施例被发现是特别有利的,因为它不具有由第二环9和/或第三环17引起的空间要求。
107.类似于模拟设备100,图4至图7所示的模拟设备101包括观察器29。
108.具体而言,图4、5和6显示了模拟设备101的三种配置,在使用者20从初始位置(图4)、移动通过中间位置(图5)和移动到期望位置(图6)期间。
109.当使用者20处于初始位置时,模拟设备101处于最佳配置(旋转轴线8、10、15形成正交轴的三元组)并且作为控制单元21的结果,可以移动使用者20朝向中间位置并且随后朝向期望位置,使得模拟设备101的配置趋向于保持最佳起始配置。当使用者20到达期望位置时(旋转轴线4、8、10形成正交轴的三元组),模拟设备101实际上处于最佳配置。
110.图7还显示了处于期望位置的使用者20,但是这个位置是在模拟设备101的与图6所示配置不同的移动之后获得的。
111.模拟设备101的不同运动,特别是第二环9沿顺时针方向绕第三旋转轴线10旋转90
°
,以及杆25沿逆时针方向绕单个轴旋转90
°
,在这种情况下导致模拟设备101的阻塞条件(第一旋转轴线4和第三旋转轴线10重合并且第二旋转轴线8和第四旋转轴线15重合)。通过提供根据本发明的控制单元21来防止这种情况,该控制单元21将选择通过图6中所示的移动到达使用者20的相同位置。
112.本发明由此实现了所提出的目的,同时提供了上述优点。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1