汽车生产的演示方法与流程
1.本发明属于汽车生产演示技术领域,特别是涉及一种汽车生产的演示方法。
背景技术:
2.现代化大生产中,经常邀请领导、机构人员、媒体及普通群众等进行参观,以增加社会各个阶层对新产品、新技术的了解与认知,从而获得更多的资源投入。但是,对于智能制造等一些新兴生产技术,特别是在汽车生产领域,新设备乃至新产线投入成本高、周期长,难以在短时间内建设。因此,采用演示设备对新技术、新产品进行模拟演示成为一种可行方案。在汽车生产领域,通常采用汽车模型、玩具车等作为装配演示小车。但是现有的汽车模型、玩具车通常采用多个零部件在生产线上组装而成,其零部件数量多,装配工艺复杂,组装周期长,难以在参观过程中完成组装,影响了参观效果。
技术实现要素:
3.鉴于以上所述现有技术的缺点,本发明的目的在于提供一种汽车生产的演示方法,用于解决现有技术中装配演示小车演示周期长等问题。
4.为实现上述目的及其他相关目的,本发明提供一种汽车生产的演示方法,使用装配岛及装配演示小车对汽车生产进行演示,
5.所述装配演示小车包括底盘模块、驱动模块及能源模块,所述底盘模块包括设置于所述底盘模块前部及后部的连接结构,以及设置于所述底盘模块中部的能源舱;
6.所述装配岛包括装配台及装配机器人,所述装配台上设置有用于装夹所述装配演示小车的装夹组件和用于顶升所述能源模块的辅助装配组件;
7.所述演示方法包括:
8.所述装配机器人将所述底盘模块放置于所述装夹组件上,所述装夹组件对所述底盘模块装夹定位;
9.所述装配机器人将所述驱动模块对应于所述连接结构放置于所述底盘模块上,所述装夹组件对所述驱动模块装夹定位,所述装配机器人将所述驱动模块固定连接在所述底盘模块上;
10.所述辅助装配组件将所述能源模块顶升入所述能源舱内,所述装配机器人将所述能源模块固定连接在所述底盘模块上。
11.可选地,所述装配演示小车还包括车壳,所述装配机器人将所述驱动模块固定连接在所述底盘模块上步骤后还包括:所述装配机器人将所述车壳对应于所述连接结构放置于所述底盘模块上,所述装配机器人将所述车壳固定连接在所述底盘模块上。
12.可选地,所述装夹组件还包括升降装置,
13.所述装配机器人将所述驱动模块对应于所述连接结构放置于所述底盘模块上之后,所述装夹组件通过所述升降装置上升;
14.所述装配机器人将所述驱动模块固定连接在所述底盘模块上之后,所述装夹组件
通过所述升降装置下降;
15.所述装配机器人将所述车壳对应于所述连接结构放置于所述底盘模块上之后,所述装夹组件通过所述升降装置上升;
16.所述装配机器人将所述能源模块固定连接在所述底盘模块上之后,所述装夹组件通过所述升降装置下降到最低位置。
17.可选地,所述装夹组件包括工装平台及安装于工装平台上的一对装夹机构,所述工装平台设有与所述能源模块尺寸对应的开口,所述装夹机构包括第一压紧部、第二压紧部以及用于驱动所述第一压紧部移动的第一运动部、用于驱动第二压紧部的移动的第二运动部;
18.所述装配机器人将所述底盘模块放置于所述工装平台之后,所述第一压紧部在所述第一运动部的作用下水平相向运动以定位所述底盘模块;所述装配机器人将所述驱动模块放置于所述底盘模块上之后,所述第二压紧部在所述第二运动部的作用下压紧在所述驱动模块上;所述装配机器人将所述驱动模块固定连接在所述底盘模块上之后,所述第二压紧部在第二运动部的作用下从所述驱动模块上移开;所述装配机器人将所述车壳放置于所述底盘模块上之后,所述第二压紧部在所述第二运动部的作用下压紧在所述车壳上。
19.可选地,所述第一运动部为在水平方向上移动的滑动气缸;所述第二运动部为在垂直方向上转动升降的转角压紧气缸。
20.可选地,所述连接结构包括安装孔及定位柱,所述装配机器人将所述驱动模块放置于所述底盘模块上后,所述底盘模块与所述驱动模块之间通过所述定位柱定位,所述装配机器人通过所述安装孔以螺钉将所述驱动模块固定在所述底盘模块上。
21.可选地,所述驱动模块为两个,两个所述驱动模块分别为前驱模块及后驱模块,所述驱动模块包括原动机及车轮,所述装配机器人分别将所述前驱模块及所述后驱模块放置在所述底盘模块上。
22.可选地,所述装配机器人上设置有图像采集装置,所述装配机器人通过所述图像采集装置获取底盘模块的图像信息;
23.在所述装配机器人将所述驱动模块放置于底盘模块之前,包括:
24.获取底盘模块的图像信息;
25.分析所述图像信息,得到所述连接结构的位置信息;
26.根据所述驱动模块的位置信息及所述连接结构的位置信息规划所述装配机器人的移动路径;
27.所述装配机器人根据所述移动路径,将所述驱动模块装配至所述底盘模块。
28.可选地,所述装配机器人包括机械臂,所述图像采集装置设置于所述机械臂上。
29.可选地,所述装配岛还包括显示器,所述显示器用于实时显示所述装配演示小车的装配进展信息。
30.如上所述,本发明的一种汽车生产的演示方法,具有以下有益效果:由于装配演示小车包括由各个零部件分别集成为的底盘模块、驱动模块及能源模块。因此采用采用使用装配演示小车对汽车生产进行演示时,底盘模块、驱动模块及能源模块的模块化结构经过简单步骤组装后即可得到装配演示小车,步骤简单、方便,能够在较短时间内完成组装,适于在参观过程中进行演示。同时,底盘模块、驱动模块及能源模块之间功能划分明确,与现
有汽车结构接近,形象直观,易于社会大众理解,演示效果好。
附图说明
31.图1为本发明实施例中装配演示小车的结构示意图;
32.图2为本发明实施例中底盘模块的结构示意图其一;
33.图3为本发明实施例中能源模块的结构示意图;
34.图4为本发明实施例中底盘模块的结构示意图其二;
35.图5为本发明实施例中驱动模块的结构示意图其一;
36.图6为本发明实施例中驱动模块的结构示意图其二。
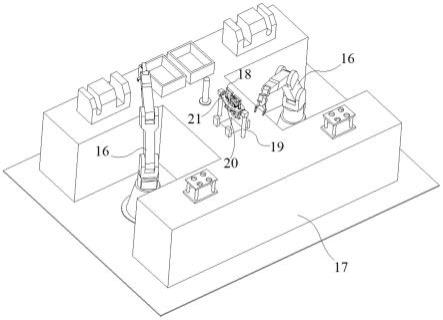
37.图7为本发明实施例中装配岛的结构示意图。
38.图8为本发明实施例中装夹组件的结构示意图。
39.图9为本发明实施例中演示方法的流程框图。
40.附图标记说明:底盘模块1、后驱模块2、前驱模块3、能源模块4、能源舱5、观察窗6、连接结构7、第一定位柱8、插头9、摄像头10、光电传感器11、安装孔12、第二定位柱13、插槽14、车轮15、装配机器人16、装配台17、装夹机构18、升降装置19、装配演示小车20、工装平台21。
具体实施方式
41.以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效。
42.请参阅图1至图8。须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
43.本实施例提供一种汽车生产的演示方法,使用装配岛及装配演示小车20对汽车生产进行演示。请参阅图1~图6,装配演示小车20包括底盘模块1、驱动模块及能源模块4,底盘模块1包括设置于底盘模块1前部及后部的连接结构7,以及设置于底盘模块1中部的能源舱5。
44.请参阅图7,装配岛包括装配台17及装配机器人16,装配台17上设置有用于装夹装配演示小车20的装夹组件和用于顶升能源模块的辅助装配组件。
45.请参阅图9,演示方法包括以下步骤:
46.步骤s10:装配机器人16将底盘模块1放置于装夹组件上,装夹组件对底盘模块1装夹定位。
47.步骤s20:装配机器人16将驱动模块对应于连接结构7放置于底盘模块1上,装夹组件对驱动模块装夹定位,装配机器人16将驱动模块固定连接在底盘模块1上。
48.步骤s30:辅助装配组件将能源模块4顶升入能源舱5内,装配机器人16将能源模块
4固定连接在底盘模块1上。
49.在一些实施例中,装配演示小车20还包括车壳,步骤s20之后,也即装配机器人16将驱动模块固定连接在底盘模块1上之后,还包括以下步骤:
50.步骤s21:装配机器人16将车壳对应于连接结构7放置于底盘模块上,装配机器人16将车壳固定连接在底盘模块1上。
51.车壳上用于遮盖驱动模块及能源模块4,能够对底盘模块1及安装在底盘模块1上的驱动模块及能源模块4起到保护。车壳还可以根据实际车辆的外观进行塑形加工,使装配车壳后的小车具有更加逼真的演示效果。具体的,底盘模块1上设置有安装柱,车壳通过安装柱安装在底盘模块1上。
52.驱动模块与底盘模块之间、车壳与底盘模块之间可以采用多种连接方式实现紧固连接,比如胶接、铆钉连接。本实施例中,驱动模块与底盘模块之间、车壳与底盘模块之间均采用螺钉紧固连接,螺钉连接具有可拆装性好,连接方便。
53.如图8所示,在一些实施例中,装夹组件还包括升降装置19,装夹组件能够通过升降装置19升降。
54.步骤s20中,在装配机器人16将驱动模块对应于连接结构7放置于底盘模块1上之后,装夹组件通过升降装置19上升,便于装配机器人16对驱动模块安装固定。
55.步骤s20中,装配机器人16将驱动模块固定连接在底盘模块1上之后,装夹组件通过升降装置19下降,以便于将能源模块4安装固定到能源舱5中,也便于装配机器人16将车壳放置在底盘模块1上。
56.步骤s21中:配机器人16将车壳对应于连接结构7放置于底盘模块1上之后,装夹组件通过升降装置19上升,便于配机器人16对车壳安装固定。
57.步骤s30之后,也即装配机器人16将能源模块4固定连接在底盘模块1上之后,装夹组件通过升降装置19下降到最低位置。
58.装夹组件根据装配演示流程通过升降装置19实现上升或下降,一方面方便了机器人作业,另一方面也能让参观者针对智能制造有了更直观的感受。
59.在一些实施例中,装夹组件包括工装平台21及安装于工装平台21上的装夹机构,工装平台21设有与能源模块4尺寸对应的开口,装夹机构18包括第一压紧部、第二压紧部以及用于驱动第一压紧部移动的第一运动部、用于驱动第二压紧部的移动的第二运动部。
60.装配机器人16将底盘模块1放置于工装平台21之后,第一压紧部在第一运动部的作用下水平相向运动,以定位并约束底盘模块1,防止底盘模块1在后续装配过程中发生位移。装配机器人16将驱动模块放置于底盘模块1上之后第二压紧部在第二运动部的作用下压紧在驱动模块上,防止驱动模块在后续装配过程中发生位移。
61.装配机器人16将驱动模块固定连接在底盘模块1上之后,第二压紧部在第二运动部的作用下从驱动模块上移开,以便装配车壳。装配机器人16将车壳放置于底盘模块1上之后,第二压紧部在第二运动部的作用下压紧在车壳上,防止车壳在紧固的过程中位移。
62.具体的,在一些实施例中,第一运动部为在水平方向上移动的滑动气缸;所述第二运动部为在垂直方向上转动升降的转角压紧气缸。
63.在一些实施例中,能源舱5底部设有用于能源模块4进出的拆装开口,能源模块4可以通过拆装开口安装在能源舱5内,当能源模块4安装在能源舱5内时,能源模块4与驱动模
块电连接以对驱动模块供能。
64.在步骤s30中,也即辅助装配组件将能源模块4顶升入能源舱5内,装配机器人16将能源模块4固定连接在底盘模块1上,包括以下分步骤:
65.步骤s31:装配机器人16将能源模块4放置于辅助装配组件上。
66.步骤s32:能源模块4在辅助装配组件的顶升作用下,依次穿过工装平台21的开口及拆装开口后进入能源舱5内。
67.步骤s33:能源模块4在第一辅助装配组件的顶升作用下,依次穿开口及能源舱5底部的拆装开口后,进入能源舱5内。然后,装配机器人16将能源模块4固定安装在能源舱5内。本实施例中,装配机器人16通过螺钉将能源模块4安装在能源舱5内。
68.在一些实施例中,连接结构7还包括安装孔12及定位柱。在步骤s20中,装配机器人16将驱动模块放置于底盘模块1上后,底盘模块1通过定位柱对驱动模块定位,装配机器人16通过安装孔12以螺钉将驱动模块固定在底盘模块1上。
69.在一些实施例中,驱动模块包括原动机及车轮15,驱动模块为两个,两个驱动模块分别为前驱模块3及后驱模块2。在步骤s20中,装配机器人16分别将前驱模块3及后驱模块2放置在底盘模块1上。目前的汽车,特别是电动车,通常包括前驱及后驱,因此驱动模块可以为两个,两个驱动模块可以分别演示汽车的前驱及后驱,以提高演示的真实程度。
70.在一实施例中,前驱模块3具有转向机构,转向机构包括转向舵机及转向连杆,转向连杆与车轮15相连,转向舵机通过转向连杆驱动车轮15偏转。转向机构可以使小车转向,更加真实地演示汽车的行驶过程。
71.在一实施例中,原动机为电机,能源模块4为电池。电机及电池结构简单,特别适用于对电动车进行演示。在另一实施例中,原动机可以为微型内燃及,能源模块4为油箱,适用于对燃油车进行演示。
72.在一实施例中,底盘模块1为长方形,能源舱5的顶部设有可拆卸连接的主控盒,主控盒中容设有主控电路板,能源模块4与主控电路板通过导电簧片电连接。
73.在一实施例中,底盘模块1的前端设置有光电传感器11及红外传感器,光电传感器11、红外传感器分别与主控电路板电相连。光电传感器11、红外传感器能够采集小车周围的环境数据,为小车的自动行驶提供数据。主控电路板在小车行驶过程中,根据光电传感器11、红外传感器所采集到的环境信息,对小车的速度、方向等进行控制。
74.在一实施例中,底盘模块1的前端还设有摄像头10,摄像头10用于在小车行驶过程中采集图像。
75.能源模块4上设置有第二定位柱13,底盘模块1上也设置有与第二定位柱13配合的定位孔槽,第二定位柱13的端部为锥形。在步骤s32中,能源模块在辅助装配组件的顶升作用下,依次穿过开口及拆装开口后进入能源舱内时,第二定位柱13的端部可以对第二定位柱13进行导向,便于能源模块4的安装。
76.在一实施例中,在步骤s32中,当驱动模块、能源模块4安装在底盘模块1上时,驱动模块、能源模块4分别与连接结构7的插拔式电连接接口相连,能源模块4通过拔式电连接接口向驱动模块供能。插拔式电连接接口直接集成设置在底盘模块1上,无需另外安装,简化了小车的装配步骤。
77.具体的,在一实施例中,插拔式电连接接口包括插头9,驱动模块上设置有插槽14。
插头9、插槽14能够互相配合,驱动模块安装在底盘模块1上,通过插槽14及插头9实现与底盘模块的电连接。如图5及图6所示,本实施例中能源舱5内设置有插槽14,能源模块4上设置有插头9。当能源模块4安装在能源舱5内时,插头9与插槽14配合,实现能源模块4与底盘模块1的电连接。
78.具体的,本实施例中底盘模块1的插头9与插槽14之间设置有线缆,能源模块4与驱动模块之间通过线缆实现电连接。
79.能源舱5上设置有观察窗6。观察窗6能够在能源模块4的安装过程中,便于参观人员通过观察窗6看到能源模块4的安装,使小车的装配过程演示更加直观。
80.在一些实施例中,装配机器人16上设置有图像采集装置,所述装配机器人通过所述图像采集装置获取底盘模块的图像信息;
81.在步骤s20之前,也即装配机器人16将驱动模块放置于底盘模块1之前,包括:
82.获取底盘模块1的图像信息;
83.分析图像信息,得到连接结构7的位置信息;
84.根据驱动模块的位置信息及连接结构7的位置信息规划装配机器人1的移动路径;
85.装配机器人16根据所述移动路径,将驱动模块装配至底盘模块1。
86.连接结构7特征明显,与底盘模块上其他的特征之间差异大,易于识别。
87.一些实施例中,装配岛还包括显示器,显示器用于实时显示装配演示小车20的装配进展信息,形象直观,便于参观人员观察,有利于参观人员理解图像采集的作用,加深对图像采集原理的理解。
88.综上所述,本实施例提供的一种汽车生产的演示方法,由于装配演示小车包括由各个零部件分别集成为的底盘模块、驱动模块及能源模块。因此采用采用使用装配演示小车对汽车生产进行演示时,底盘模块、驱动模块及能源模块的模块化结构经过简单步骤组装后即可得到装配演示小车,步骤简单、方便,能够在较短时间内完成组装,适于在参观过程中进行演示。同时,底盘模块、驱动模块及能源模块之间功能划分明确、形象直观,易于社会大众理解,演示效果好。
89.上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1