一种用于工业机器人自动装配作业的教学装置及使用方法与流程
本发明涉及机器人教学,尤其是涉及一种用于工业机器人自动装配作业的教学装置及使用方法。
背景技术:
1、随着我国工业智能化制造的发展,作为核心竞争力的工业机器人的数量已呈爆发式增长趋势,而与之对应的机器人专业人才却显得严重不足,因此,培养更多适应工业升级所需的专业机器人技能人才迫在眉睫。现有的工业机器人实训平台包含工业机器人、智能视觉系统、伺服电气系统、plc控制系统、机械机构及气动机构,可以实现对高速传输的工件进行分拣、检测、搬运等操作,在工件装配时,需要使用工装对盒体进行固定和定位,为后期装配零件或拧螺丝提供基础,盒体的固定和定位在工件装配中是比较重要的一环,盒体固定和定位的越快,就越能够提高工件的装配效率。其次,机器人装配时需要使用工具反复移动作业,工装中各部件的布局直接影响着机器人的移动总量。
技术实现思路
1、本发明提供一种用于工业机器人自动装配作业的教学装置及使用方法,用以提高盒体固定及定位的速度和优化工装中各部件的布局降低机器人的移动总量。
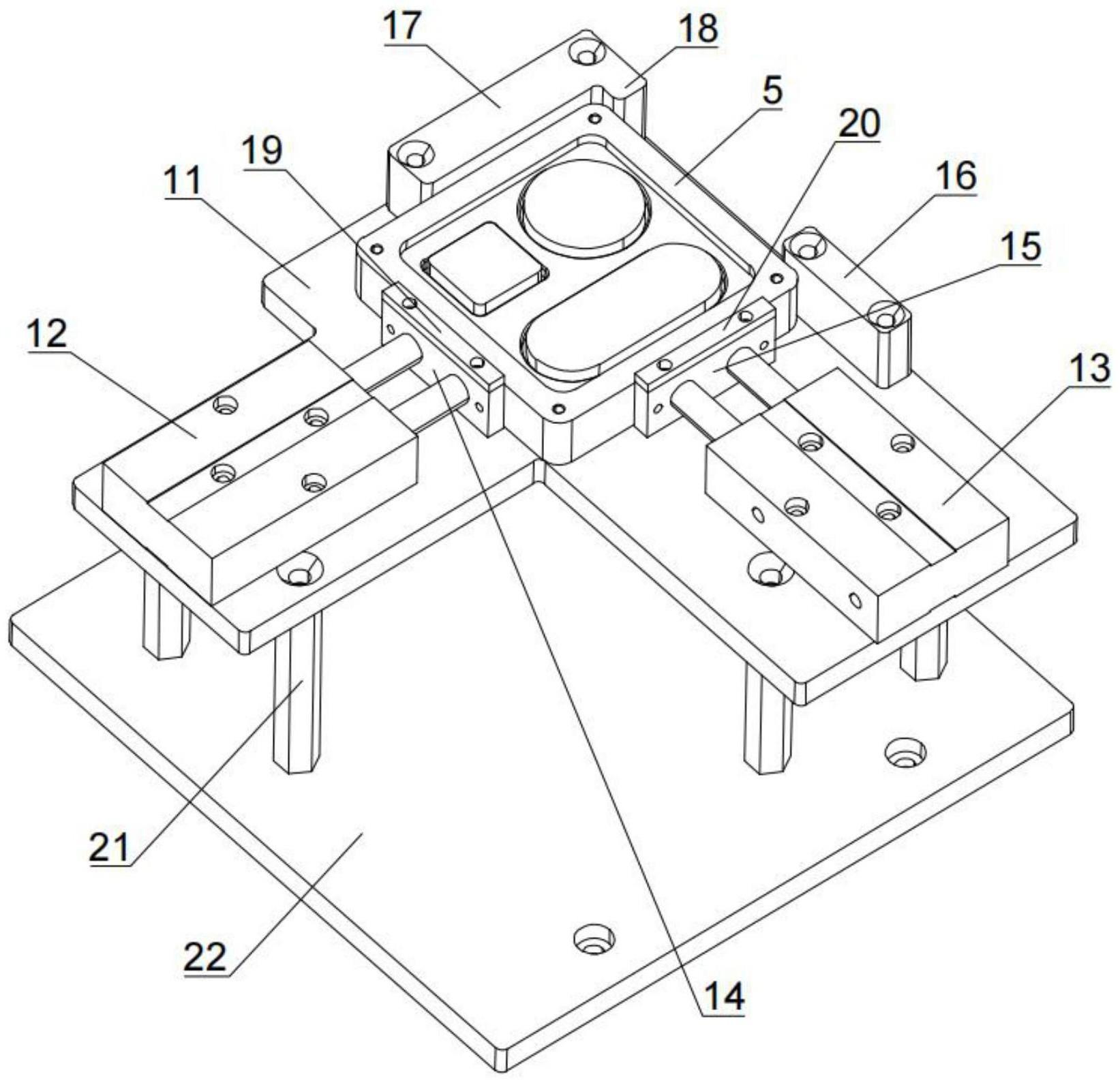
2、本发明提供一种用于工业机器人自动装配作业的教学装置,包括:工件定位机构、螺丝供料机构、配件存放架和盒体存放架,所述螺丝供料机构、配件存放架和盒体存放架呈品字型绕工件定位机构分布,且所述螺丝供料机构、工件定位机构和配件存放架呈一条直线分布;所述工件定位机构包括:台板、第一气缸、第二气缸、第一推板、第二推板、第一限位块和第二限位块,所述第一限位块和第二限位块分别设于第一推板和第二推板的前方,所述第一气缸和第二气缸分别与第一推板和第二推板固定,所述第一推板的运动方向垂直于第二推板的运动方向。
3、优选的,所述第二限位块的端部朝第一限位块的方向延伸有限位板,所述限位板朝向第一气缸的侧面与第一限位块朝向第一气缸的侧面平齐设置,所述第一限位块和限位板与盒体相接触的部分位于盒体的两端,所述盒体的中间位置处设有定位槽。
4、优选的,所述台板包括第一平板以及与所述第一平板固定的第二平板,所述第一平板和第二平板呈l型分布,所述第一气缸和第二气缸分别固定在第一平板和第二平板上。
5、优选的,所述台板通过多个立柱固定在底板上。
6、优选的,所述第一推板的上端和第二推板的上端分别设有第一横板和第二横板,所述第一横板通过螺栓与第一推板固定,所述第二横板通过螺栓与第二推板固定。
7、优选的,所述配件存放架包括第一存放板和第一支架,所述第一存放板上放置有多个配件,所述第一存放板与第一支架可拆卸连接。
8、优选的,所述第一存放板的两侧分别设有把手。
9、优选的,所述第一存放板上开有多个与配件相适配的置放槽。
10、优选的,所述盒体存放架包括由上至下设置的多个第二存放板,所述盒体放置在第二存放板上,所述盒体处设有传感器。
11、优选的,所述盒体存放架还包括两个竖板,所述第二存放板设于两个竖板之间,所述第二存放板的两端分别嵌入竖板内。
12、本发明还提供了一种如上述所述的用于工业机器人自动装配作业的教学工装的使用方法,包括如下步骤:
13、机器人通过夹爪抓取盒体存放架上的盒体并将其放置在台板上,
14、第一气缸和第二气缸动作,第一推板和第二推板将盒体限制在第一限位块和第二限位块上,完成对盒体的夹紧及定位;
15、机器人通过吸盘将配件存放架上的圆形板、方形板和椭圆形板依次放入盒体内,然后通过胶枪在盒体上涂胶,涂完胶后通过吸盘将盒盖盖在盒体上;
16、机器人通过电批工具拾取螺丝供料机构的螺丝,然后将螺丝依次拧入盒盖和盒体中,使盒盖固定在盒体中,完成工件的装配;
17、第一推板和第二推板缩回解除对盒体的限制,机器人通过夹爪取走工件。
18、与现有技术相比,本发明中,第一气缸和第二气缸动作,第一推板和第二推板将盒体快速限制在第一限位块和第二限位块上,实现了自动夹紧的同时对盒体实现定位,定位过程简单快捷,能有效提高装配效率。其次,工件定位机构、螺丝供料机构、配件存放架和盒体存放架的分布结构方便机器人装配,减少机器人的移动总量。
技术特征:
1.一种用于工业机器人自动装配作业的教学装置,其特征在于,包括:工件定位机构、螺丝供料机构、配件存放架和盒体存放架,所述螺丝供料机构、配件存放架和盒体存放架呈品字型绕工件定位机构分布,且所述螺丝供料机构、工件定位机构和配件存放架呈一条直线分布;所述工件定位机构包括:台板、第一气缸、第二气缸、第一推板、第二推板、第一限位块和第二限位块,所述第一限位块和第二限位块分别设于第一推板和第二推板的前方,所述第一气缸和第二气缸分别与第一推板和第二推板固定,所述第一推板的运动方向垂直于第二推板的运动方向。
2.根据权利要求1所述的用于工业机器人自动装配作业的教学工装,其特征在于,所述第二限位块的端部朝第一限位块的方向延伸有限位板,所述限位板朝向第一气缸的侧面与第一限位块朝向第一气缸的侧面平齐设置,所述第一限位块和限位板与盒体相接触的部分位于盒体的两端,所述盒体的中间位置处设有定位槽。
3.根据权利要求2所述的用于工业机器人自动装配作业的教学工装,其特征在于,所述台板包括第一平板以及与所述第一平板固定的第二平板,所述第一平板和第二平板呈l型分布,所述第一气缸和第二气缸分别固定在第一平板和第二平板上。
4.根据权利要求3所述的用于工业机器人自动装配作业的教学工装,其特征在于,所述台板通过多个立柱固定在底板上。
5.根据权利要求4所述的用于工业机器人自动装配作业的教学工装,其特征在于,所述第一推板的上端和第二推板的上端分别设有第一横板和第二横板,所述第一横板通过螺栓与第一推板固定,所述第二横板通过螺栓与第二推板固定。
6.根据权利要求1所述的用于工业机器人自动装配作业的教学工装,其特征在于,所述配件存放架包括第一存放板和第一支架,所述第一存放板上放置有多个配件,所述第一存放板与第一支架可拆卸连接。
7.根据权利要求6所述的用于工业机器人自动装配作业的教学工装,其特征在于,所述第一存放板的两侧分别设有把手。
8.根据权利要求7所述的用于工业机器人自动装配作业的教学工装,其特征在于,所述第一存放板上开有多个与配件相适配的置放槽。
9.根据权利要求1所述的用于工业机器人自动装配作业的教学工装,其特征在于,所述盒体存放架包括由上至下设置的多个第二存放板,所述盒体放置在第二存放板上,所述盒体处设有传感器。
10.一种包括权利要求1-9任一项所述的用于工业机器人自动装配作业的教学工装的使用方法,其特征在于,包括如下步骤:
技术总结
本发明公开了一种用于工业机器人自动装配作业的教学装置及使用方法,螺丝供料机构、配件存放架和盒体存放架呈品字型绕工件定位机构分布,且螺丝供料机构、工件定位机构和配件存放架呈一条直线分布;工件定位机构包括:台板、第一气缸、第二气缸、第一推板、第二推板、第一限位块和第二限位块,第一限位块和第二限位块分别与第一推板和第二推板相配合,第一气缸和第二气缸分别与第一推板和第二推板固定,在运动方向上,第一推板垂直于第二推板上。与现有技术相比,工件定位机构实现了自动夹紧的同时对盒体实现定位,定位过程简单快捷。其次,工件定位机构、螺丝供料机构、配件存放架和盒体存放架的分布结构方便机器人装配,减少机器人的移动总量。
技术研发人员:曾伟,王子欣,王晓辉,厉超,任文艺,袁健,蒋昭
受保护的技术使用者:中电数科科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!