一种海上风电安装船动力定位操作训练模拟系统
本发明涉及一种海上风电船动力定位控制领域,尤其是涉及一种海上风电安装船动力定位操作训练模拟系统。
背景技术:
1、海上风电设备安装需要一种特殊的工程船——风电安装船。海上风电安装船作业环境复杂,动力定位和吊机等操作员都必须持证上岗,目前动力定位操作员的培训均为国外垄断,培训价格高且周期长,实船也无法提供类似的操作培训。因此需要开发适用于海上风电安装船的动力定位操作训练模拟系统,用于风电安装船动力定位操作员培训、考核、日常训练,从而提升动力定位操作员的操作水平、提高海上作业效率,同时也可以打破国外动力定位培训的垄断局面。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种海上风电安装船动力定位操作训练模拟系统。
2、本发明的目的可以通过以下技术方案来实现:
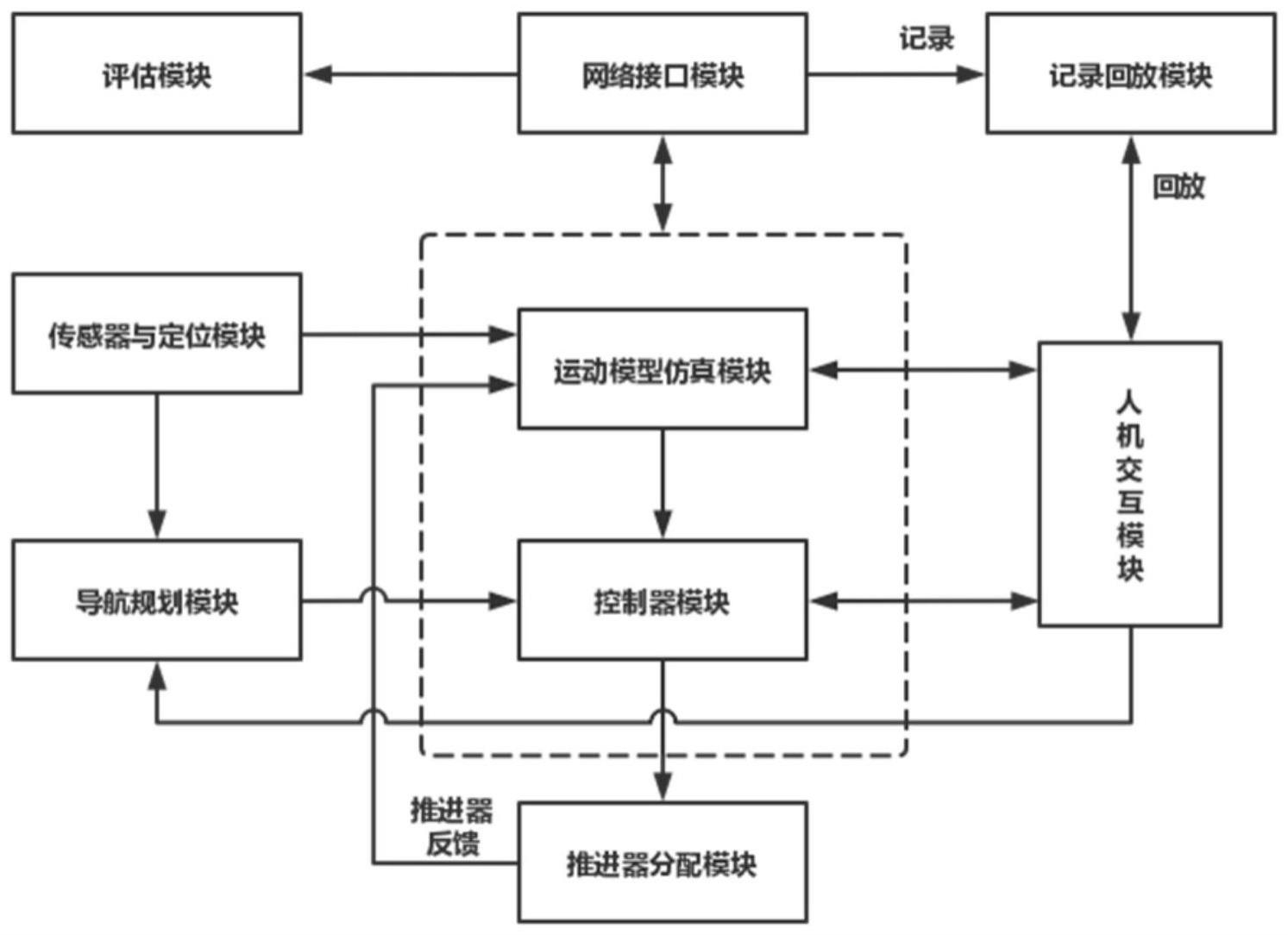
3、一种海上风电安装船动力定位操作训练模拟系统,包括传感器与定位模块、运动模型仿真模块、人机交互模块、控制器模块、导航规划模块及推进器分配模块;
4、所述传感器与定位模块用于模拟风电安装船船位和附近海况数据;
5、所述运动模型仿真模块用于结合模拟风电安装船固定参数构建船舶运动模型;所述固定参数包括船长、船宽、吃水、上层建筑受风面积及推进器分布;
6、所述人机交互模块包括模拟驾驶台显示单元,运动模型仿真模块将数据传送至人机交互模块的模拟驾驶台显示单元,提供可视化参考;
7、所述模拟驾驶台显示单元用于供操作员对风电安装船进行模拟操作,对模拟本船实施的操作指令由所述控制器模块接收;
8、所述导航规划模块用于主动读取传感器与定位模块的相应数据,结合人机交互模块对目的船位和艏向的设定,实时规划最优路径并且选取合适的分航点,并将分航点坐标集发送给控制器模块;控制器模块读取操作指令和分航点坐标集,通过运动控制算法,计算本船模拟推进器需要提供的推力方向和大小;控制器模块将计算结果发送至推进器分配模块,实现对推进器的精准控制,随后推进器模块把推进效果反馈给运动模型仿真模块用于本船运动数学模型的修正。
9、进一步地,所述传感器与定位模块模拟海况数据包括手动海况模拟方式和自动海况模拟方式,所述手动海况模拟方式为由操作员手动输入风浪参数;所述自动海况模拟方式为预先下载好特定海域的风浪参数,并在模拟系统内调用。此2种海况模拟方式可满足动力定位操作员的常规训练和针对性训练任务。
10、进一步地,所述运动模型仿真模块中的船舶运动模型采用扩展型卡尔曼滤波技术,扩展型卡尔曼滤波器将风、流、船位和推进器反馈作为输入数据,对比模拟本船的坐标、艏向和船舶运动模型生成的预测数据,得出两者的差值以更新船舶运动模型。扩展型卡尔曼滤波技术通过计算模拟测量数据与本船运动模型预测数据的差值实现模型更新,此方法有利于提高船舶运动模型的稳定性。
11、进一步地,所述导航规划模块以模拟本船船位和艏向为初始状态,以主动输入的航行终点坐标和期望船艏向为目标状态,在定位图视图上规划出导航路径。利用图像识别算法,对导航路径上的弯曲路径设置更多的分航点,对相对平直的路径设置更少的分航点。分航点坐标集作为导航规划模块的输出数据发送给控制器。
12、进一步地,所述控制器模块中的运动控制算法需要对每个推进器的目标推力和目标方向分别计算,包括以下步骤:
13、以推进器的推力上限和推进方向限制作为约束条件;
14、根据前进方位,降低2个前向推进器的推力权重,同时增大力矩权重以稳定航向;
15、执行模拟退火算法计算并保存多个当前较优方案,以当前较优方案作为交叉变异的初始值扩大种群,降温后继续执行模拟退火算法,直至筛选出最优方案。
16、该运动控制算法结合了模拟退火算法和遗传算法的优势,具备快速寻找全局最优推力分配方案的特性。
17、进一步地,在动力定位操作的进点与撤点操作过程中运用深度学习bp神经网络,包括以下步骤:
18、在qt平台上建立bp神经网络模型;
19、将模拟系统收到的每个改变推力的操作指令和对应的系统状态响应作为一对训练样本;
20、使用所述训练样本反复训练优化操作指令与模拟系统状态响应间的连接权值计算得到最优连接权值应用到模拟本船的操控。经过训练的深度学习bp神经网络可以进化为具有预测特性的神经网络。
21、进一步地,该模拟系统还包括网络接口模块;
22、所述运动模型仿真模块及控制器模块均与网络接口模块连接,用于实时上传操作员的操作指令和模拟本船的运动数据。
23、进一步地,该模拟系统还包括记录与回放模块,用于收集本次操作训练的关键数据,并在操作结束时生成记录文件;所述人机交互模块能够选择调用记录文件,复现详细的操作过程。选择开启录制后,模拟系统触发航行数据监控,将数据保存为视频文件。选择记录回放后,操作员可以选择指定文件,在主界面上实现回放。
24、进一步地,所述记录与回放模块包括高速存储单元,记录环节和回放环节均利用qt实现;
25、所述记录环节在qt环境下调用avilib库,抓取显示界面的帧图像,并按顺序保存;
26、所述回放环节使用qvideowidget和qmediaplayer完成视频播放器的设计。
27、进一步地,该模拟系统还包括评估模块,用于自动获取操作员的操作指令和模拟本船的运动数据,与预制的评分标准对比并于训练结束之后打分。教练员可以根据考核要求设计模拟系统的评分规则,由模拟系统客观打分。该方案可以有效降低主观因素引起的评估波动,有助于实现动力定位评估标准的统一化。
28、进一步地,所述评估模块包括合格性判定和评分规则;
29、所述合格性判定包括是否在限制时间内完成、是否满足船位误差、是否稳定在目标艏向;
30、所述评分规则符合以下函数:
31、s=w1(t0-t)+w2e+w3∑(r0-r)2
32、w1+w2+w3=1
33、式中,t0为评估限制操作时间,t为操作员实际操作用时,e代表和操作过程能源消耗有关的公式,∑(r0-r)2为航迹曲线拟合度方差,w1、w2、w3分别为对应权重系数。
34、与现有技术相比,本发明具有以下有益效果:
35、1、本发明设计了一套完整的海上风电安装船动力系统操控模拟系统,可用于风电安装船动力定位操作员培训、考核、日常训练,从而提升动力定位操作员的操作水平、提高海上作业效率,同时也可以打破国外动力定位培训的垄断局面。
36、2、本发明设置了符合实际模拟需求的手动海况模拟方式和自动海况模拟方式,可满足动力定位操作员的常规训练和针对性训练任务。
37、3、本发明通过在船舶运动模型中运用扩展型卡尔曼滤波技术,有利于提高船舶运动模型的稳定性。
38、4、本发明采用的运动控制算法结合了模拟退火算法和遗传算法的优势,具备快速寻找全局最优推力分配方案的特性。
39、5、本发明通过设置评估模块,教练员可以根据考核要求设计模拟系统的评分规则,由模拟系统客观打分。该方案可以有效降低主观因素引起的评估波动,有助于实现动力定位评估标准的统一化。
- 还没有人留言评论。精彩留言会获得点赞!