虚拟驾驶控制方法、装置及存储介质与流程
本技术实施例涉及虚拟驾驶,虚拟驾驶控制方法、装置及存储介质。
背景技术:
1、虚拟驾驶场景中,虽然预设了多种场景下的控制参数来控制虚拟驾驶场景下的车辆方向。但是,由于涉及的车辆类型多样化、方向盘的控制也会有所差异,车速也影响方向盘的控制效果,且在不同的环境天气下,对于车辆方向的控制就会出现很多异常或偏差,所以会导致虚拟驾驶场景下对车辆方向的控制不够精准,此外,也无法覆盖更全面的车型,只能粗粒度的进行驾驶训练,并不能实现专有车型或任意车型的车辆在任意环境天气下的高精度驾驶训练。
技术实现思路
1、本技术实施例提供了一种虚拟驾驶控制方法、装置及存储介质,能够通过在这些路段下的模拟,能够验证虚拟驾驶场景中车速与方向盘的力反馈系数成正关系(例如,车速越快,方向盘的力反馈系数越大;车速越慢,力反馈越小;特殊情况是,车速为0时,力反馈也会非常大),那么可以通过调整车速就能控制目标车辆的行驶方向保持在方向盘的可控范围之内,即通过减少方向盘对车辆的行驶方向的控制产生偏移,即可安全的控制车辆的行驶。
2、第一方面,本技术实施例提供一种虚拟驾驶控制方法,所述方法用于虚拟驾驶控制系统,所述虚拟驾驶控制系统包括模拟器(虚拟控制器)、车辆感知模型和驾驶场景仿真平台;所述驾驶场景仿真平台包括第一区域和第二区域,其中,所述第一区域显示多种驾驶模式,每种驾驶模式包括至少两种路段素材;所述第二区域当前显示目标驾驶模式下的动态画面,所述动态画面包括行驶中的目标车辆和所述目标驾驶模式对应的至少两种路段素材,且所述目标车辆在所述第二区域的动态画面和轨迹数据通过端口传输给所述车辆感知模型;
3、所述方法包括:
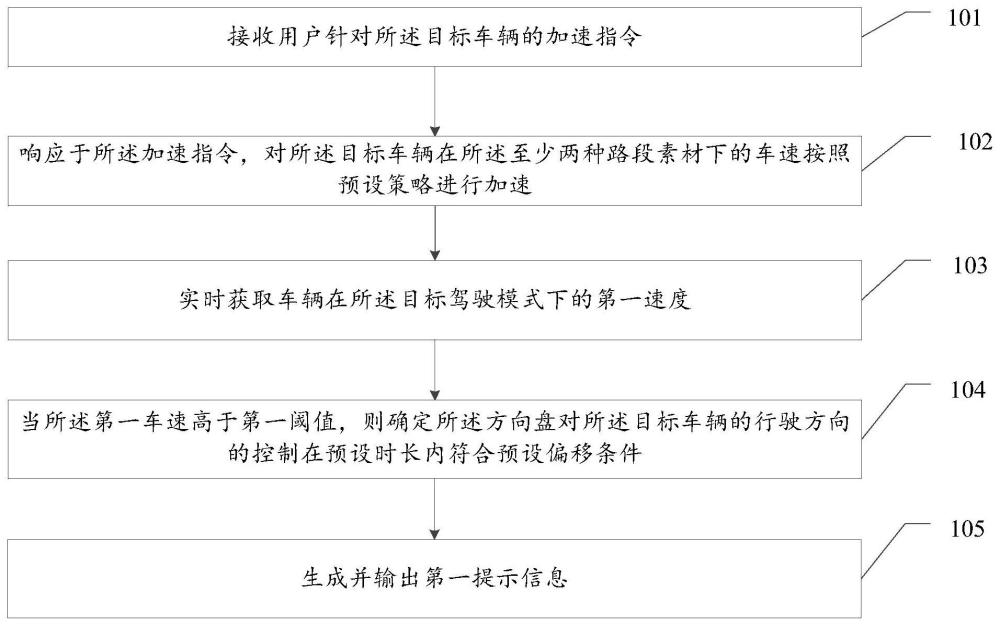
4、接收用户针对所述目标车辆的加速指令;
5、响应于所述加速指令,对所述目标车辆在所述至少两种路段素材下的车速按照预设策略进行加速;
6、实时获取车辆在所述目标驾驶模式下的第一速度,当所述第一车速高于第一阈值,则确定所述方向盘对所述目标车辆的行驶方向的控制在预设时长内符合预设偏移条件;
7、生成并输出第一提示信息,所述第一提示信息用于提示用户控制所述目标车辆的车速和注意安全驾驶。
8、一种实施方式中,所述生成并输出第一提示信息,包括以下项中的至少一项:
9、生成文字、音频或视频中的任意类型的第一提示信息,通过短信、即时通信消息、邮件、电话、弹窗中的至少一种方式输出所述第一提示信息。
10、一种实施方式中,所述确定所述方向盘对所述目标车辆的车辆方向的控制在预设时长内符合预设偏移条件之后,所述方法还包括:
11、根据所述第一车速、车速与方向盘转向力的对应关系,得到当前第一车速对应的第一力反馈系数;
12、根据所述第一车速、所述第一力反馈系数和所述目标车辆当前的第一行驶方向,得到目标车辆的目标偏移角度;
13、按照所述目标偏移角度修正所述目标车辆的行驶方向,直至确定所述方向盘对所述目标车辆的车辆方向的控制不符合预设偏移条件。
14、一种实施方式中,所述目标驾驶模式对应的至少两种路段素材分为正常路段素材和异常天气素材,所述异常天气素材至少包括雨天、雾天、雪天、雾霾、沙尘中的一项;
15、所述接收用户针对所述目标车辆的加速指令;响应于所述加速指令,对所述目标车辆在所述至少两种路段素材下的车速按照预设策略进行加速,包括:
16、接收用户针对所述目标车辆的第一指令;
17、响应于所述第一指令,对所述目标车辆在所述至少一种正常路段素材下的车速进行加速;
18、响应于所述第二指令,将当前正常路段素材切换为至少一种所述异常天气素材下的路段素材,并对所述目标车辆在至少一种所述异常路段素材下的车速进行加速。
19、一种实施方式中,所述方法还包括:
20、获取第一偏置值以及获取所述目标车辆的方向盘的第一转向力,根据所述第一转向力和所述第一偏置值得到目标转向力;
21、按照所述目标转向力控制所述方向盘的转向。
22、第二方面,本技术实施例提供一种虚拟驾驶控制装置,具有实现对应于上述第一方面提供的虚拟驾驶控制方法中所述的功能。上述该虚拟驾驶控制方法中所述的功能可以通过硬件实现,也可以通过硬件执行相应的软件实现。硬件或软件包括一个或多个与上述功能相对应的模块,模块可以是软件和/或硬件。本技术实施例不对此作限定。
23、一些实施方式中,所述虚拟驾驶控制装置应用于虚拟驾驶控制系统,所述虚拟驾驶控制系统包括模拟器(虚拟控制器)、车辆感知模型和驾驶场景仿真平台;所述驾驶场景仿真平台包括第一区域和第二区域,其中,所述第一区域显示多种驾驶模式,每种驾驶模式包括至少两种路段素材;所述第二区域当前显示目标驾驶模式下的动态画面,所述动态画面包括行驶中的目标车辆和所述目标驾驶模式对应的至少两种路段素材,且所述目标车辆在所述第二区域的动态画面和轨迹数据通过端口传输给所述车辆感知模型;
24、所述虚拟驾驶控制装置包括:
25、输入输出模块,用于接收用户针对所述目标车辆的加速指令;
26、处理模块,用于响应于所述加速指令,对所述目标车辆在所述至少两种路段素材下的车速按照预设策略进行加速;
27、所述输入输出模块还用于实时获取车辆在所述目标驾驶模式下的第一速度;
28、所述处理模块还用于当确定所述输入输出模块获取的所述第一车速高于第一阈值,则确定所述方向盘对所述目标车辆的行驶方向的控制在预设时长内符合预设偏移条件;生成并通过所述输入输出模块输出第一提示信息,所述第一提示信息用于提示用户控制所述目标车辆的车速和注意安全驾驶。
29、一种实施方式中,所述处理模块具体用于执行以下项中的至少一项:
30、生成文字、音频或视频中的任意类型的第一提示信息;
31、所述输入输出模块具体用于执行以下项中的至少一项:
32、通过短信、即时通信消息、邮件、电话、弹窗中的至少一种方式输出所述第一提示信息。
33、一种实施方式中,所述处理模块确定所述方向盘对所述目标车辆的车辆方向的控制在预设时长内符合预设偏移条件之后,还用于:
34、根据所述第一车速、车速与方向盘转向力的对应关系,得到当前第一车速对应的第一力反馈系数;
35、根据所述第一车速、所述第一力反馈系数和所述目标车辆当前的第一行驶方向,得到目标车辆的目标偏移角度;
36、按照所述目标偏移角度修正所述目标车辆的行驶方向,直至确定所述方向盘对所述目标车辆的车辆方向的控制不符合预设偏移条件。
37、一种实施方式中,所述目标驾驶模式对应的至少两种路段素材分为正常路段素材和异常天气素材,所述异常天气素材至少包括雨天、雾天、雪天、雾霾、沙尘中的一项;
38、所述处理模块具体用于:
39、通过所述输入输出模块接收用户针对所述目标车辆的第一指令;
40、响应于所述第一指令,对所述目标车辆在所述至少一种正常路段素材下的车速进行加速;
41、响应于所述第二指令,将当前正常路段素材切换为至少一种所述异常天气素材下的路段素材,并对所述目标车辆在至少一种所述异常路段素材下的车速进行加速。
42、第三方面,本技术实施例提供一种计算机设备,所述计算机设备包括:至少一个处理器和存储器;其中,所述存储器用于存储计算机程序,所述处理器用于调用所述存储器中存储的计算机程序来执行上述第一方面、第一方面的任一种实施方式中的步骤。
43、第四方面,本技术实施例提供一种计算机可读存储介质,具有实现对应于上述第一方面提供的虚拟驾驶控制方法的功能。所述功能可以通过硬件实现,也可以通过硬件执行相应的软件实现。硬件或软件包括一个或多个与上述功能相对应的模块,所述模块可以是软件和/或硬件。具体的,计算机可读存储介质存储有多条指令,指令适于处理器进行加载,以执行本技术实施例中第一方面、第一方面的任一种实施方式中的步骤。
44、相较于现有技术,本技术实施例提供的方案中,接收用户针对所述目标车辆的加速指令;响应于所述加速指令,对所述目标车辆在所述至少两种路段素材下的车速按照预设策略进行加速;实时获取车辆在所述目标驾驶模式下的第一速度,当所述第一车速高于第一阈值,则确定所述方向盘对所述目标车辆的行驶方向的控制在预设时长内符合预设偏移条件;生成并输出第一提示信息,所述第一提示信息用于提示用户控制所述目标车辆的车速和注意安全驾驶。可见,通过在这些路段下对目标车辆进行模拟,能够验证虚拟驾驶场景中车速与方向盘的力反馈系数成正关系(例如,车速越快,方向盘的力反馈系数越大;车速越慢,力反馈越小;特殊情况是,车速为0时,力反馈也会非常大),那么,可以通过调整车速就能控制目标车辆的行驶方向保持在方向盘的可控范围之内,即通过减少方向盘对车辆的行驶方向的控制产生偏移,即可安全的控制车辆的行驶。
- 还没有人留言评论。精彩留言会获得点赞!