曝光装置及光罩清洁方法与流程
本发明涉及半导体制造技术领域,尤其涉及一种曝光装置及光罩清洁方法。
背景技术:
在动态随机存储器(dynamicrandomaccessmemory,dram)等半导体器件的制造工艺中,光刻是至关重要的步骤。在光刻工艺中,光罩的洁净度是确保光刻质量的重要因素。当时,在现有的曝光机台中,并没有专门的清洁系统来清洁光罩表面,导致在曝光机台中的光罩探测系统(integratedreticleinspectionsystem,iris)检测到光罩表面存在颗粒物之后,必须要将光罩从曝光机台内取出,在曝光机台外部对光罩进行清洁。然而,这种在曝光机台外部清洁光罩的方式,至少存在如下两个方面的缺陷:一方面,将光罩从曝光机台内部取出、在曝光机台外部清洁之后再送入曝光机台的过程极大的耗费时间,降低了机台产能;另一方面,光罩在曝光机台外部清洁之后送入曝光机台的过程中,很可能遭受二次污染,导致需要再次清洁,操作相当繁琐。
因此,如何提高光罩的清洁效率,从而提高曝光机台的产能,并改善光刻质量,是目前亟待解决的技术问题。
技术实现要素:
本发明提供一种曝光装置及光罩清洁方法,用于解决现有技术中曝光机台不能对光罩进行清洁的问题,以提高光罩清洁的效率。
为了解决上述问题,本发明提供了一种曝光装置,包括:
支撑台,用于承载光罩;
检测组件,用于检测所述光罩表面的异物信息;
清洁组件,所述清洁组件连接所述检测组件,用于根据所述检测组件获取的所述异物信息定向除去所述光罩表面的异物。
可选的,所述检测组件包括:
发射器,位于所述支撑台上方,用于向所述光罩表面发射探测信号;
接收器,位于所述支撑台上方,用于接收自所述光罩表面传回的探测信号;
处理器,连接所述发射器和所述接收器,用于根据所述发射器发射的探测信号和所述接收器接收到的探测信号获取所述光罩表面的异物信息。
可选的,所述发射器同时发射的探测信号覆盖所述光罩的整个表面。
可选的,所述异物信息包括所述异物的数量、所述异物在所述光罩表面的位置以及所述异物的尺寸。
可选的,所述清洁组件包括:真空吸附部件,用于真空吸附所述光罩表面的所述异物。
可选的,所述真空吸附部件根据所述异物信息自动调节真空度。
为了解决上述问题,本发明还提供了一种光罩清洁方法,包括如下步骤:
传输光罩至曝光装置内部;
发射检测信号检测所述光罩表面的异物信息;
判断所述光罩表面是否存在异物,若是,则于所述曝光装置内除去所述光罩表面的异物。
可选的,发射检测信号检测所述光罩表面的异物信息的具体步骤包括:
发射探测信号至所述光罩表面;
接收自所述光罩表面传回的探测信号;
根据发射的探测信号和接收到的探测信号获取所述光罩表面的异物信息。
可选的,发射探测信号至所述光罩表面的具体步骤包括:
同时发射多探测信号至所述光罩表面,使得所述探测信号覆盖所述光罩的整个表面。
可选的,于所述曝光装置内除去所述光罩表面的颗粒物的具体步骤包括:
提供真空吸附部件;
根据所述异物信息驱动所述真空吸附部件朝向所述光罩表面的异物运动,定向移除所述光罩表面的异物。
本发明提供的曝光装置及光罩清洁方法,通过检测组件检测位于曝光机台内部的光罩表面的异物信息,并根据所述异物信息,利用位于所述曝光装置内部的清洁组件直接、定向去除所述光罩表面的异物,避免了将光罩取出、在曝光机台外部进行清洁的繁琐操作以及二次污染的风险,提高了光罩清洁的效率,从而相应提高了曝光装置的机台产能。
附图说明
图1是本发明具体实施方式中曝光装置的结构框图;
图2是本发明具体实施方式中的检测组件对光罩进行检测时的结构示意图;
图3是本发明具体实施方式中的清洁组件对光罩进行清洁时的结构示意图;
图4是本发明具体实施方式中光罩清洁方法的流程图。
具体实施方式
下面结合附图对本发明提供的曝光装置及光罩清洁方法的具体实施方式做详细说明。
本具体实施方式提供了一种曝光装置,图1是本发明具体实施方式中曝光装置的结构框图,图2是本发明具体实施方式中的检测组件对光罩进行检测时的结构示意图,图3是本发明具体实施方式中的清洁组件对光罩进行清洁时的结构示意图。如图1、图2和图3所示,本具体实施方式提供的曝光装置,包括:
支撑台20,用于承载光罩21;
检测组件11,用于检测所述光罩21表面的异物信息;
清洁组件12,所述清洁组件12连接所述检测组件11,用于根据所述检测组件11获取的所述异物信息定向除去所述光罩21表面的异物。
具体来说,所述支撑台20、所述检测组件11和所述清洁组件12均位于所述曝光装置内部。在将所述光罩21自外界传输至所述曝光装置内部的所述支撑台20上之后,所述检测组件11采用基于光学的检测方法或者其他检测方法对所述光罩21表面进行检测,从而获取所述光罩21表面的异物信息。举例来说,所述检测组件11可以采用基于光学的检测方法,向所述光罩21表面同时发射多束光线,通过检测所述光罩21表面反射和/或散射的光线,判断所述光罩21表面是否存在异物以及异物的相关信息。本具体实施方式中所述检测组件11检测所述光罩21表面的异物信息,有助于后续所述清洁组件12定向的、有针对性的除去所述光罩21表面存在的异物,从而提高异物清除效率,缩短异物清除时间。若通过所述检测组件11检测到所述光罩21表面存在异物,则根据所述检测组件11的反馈,直接启动位于所述曝光装置内部的清洁组件12,无需将所述光罩21移出所述曝光装置,利用所述清洁组件12根据所述异物信息直接对所述光罩21表面的异物进行定向清除。在本具体实施方式中,对所述清洁组件12的具体结构不作限定,只要能清除所述光罩21表面的异物即可,本领域技术人员可以根据实际需要进行选择,例如吹扫、真空吸附等等。本具体实施方式中所述的异物可以是但不限于所述光罩21表面存在的粉尘、微粒等颗粒物。
可选的,所述检测组件11包括:
发射器111,位于所述支撑台20上方,用于向所述光罩21表面发射探测信号;
接收器112,位于所述支撑台20上方,用于接收自所述光罩21表面传回的探测信号;
处理器113,连接所述发射器111和所述接收器112,用于根据所述发射器111发射的探测信号和所述接收器112接收到的探测信号获取所述光罩21表面的异物信息。
可选的,所述发射器111沿垂直于所述光罩21的方向向所述光罩21表面同时发射探测信号。
可选的,所述发射器111同时发射的探测信号覆盖所述光罩21的整个表面。
具体来说,所述探测信号可以是光信号,也可以是声信号,本具体实施方式对此不作限定。以下以所述探测信号为光信号为例进行说明。所述发射器111、所述接收器112和所述处理器113均设置于所述支撑台20上方,且所述处理器113同时连接所述发射器111和所述接收器112。所述发射器111的光信号发射面覆盖所述光罩21背离所述支撑台20的整个表面,所述接收器112的光信号接收面也覆盖所述光罩21背离所述支撑台20的整个表面,使得所述发射器111的单次发射和所述接收器112的单次接收,就可以获得所述光罩21的整个表面的异物信息。所述发射器111能够同时发射多束光线,且所述发射器111发射的光束的方向为竖直向下,且多束光线相互平行,如图2中的实线箭头所示,经所述光罩20表面的颗粒物22散射和/或反射的光线如图2中的虚线箭头所示。其中,所述发射器111发射的光束可以是但不限于激光光束。
本领域技术人员可以根据实际需要选择所述异物信息的具体内容。可选的,所述异物信息包括所述异物的数量、所述异物在所述光罩21表面的位置以及所述异物的尺寸。
可选的,所述清洁组件12包括:
真空吸附部件121,用于真空吸附所述光罩21表面的所述异物。
可选的,所述真空吸附部件121根据所述异物信息自动调节真空度。
可选的,所述清洁组件12还包括:
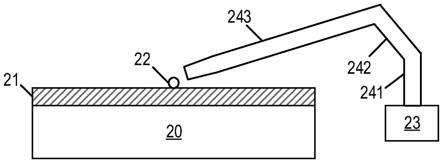
基座23,位于所述支撑台20外部,所述基座23内具有真空泵122;
所述真空吸附部件121一端与所述基座23连接、另一端用于吸附所述光罩21表面的颗粒物。
具体来说,当所述检测组件11对所述光罩21表面的异物情况进行检测时,所述清洁组件位于所述支撑台20外部。当所述检测组件11确认所述光罩21表面存在异物时,则所述清洁组件12中的所述真空吸附部件121移动至所述光罩21上方,所述真空泵122开启,以通过真空吸附定向去除所述光罩21表面的异物。本具体实施方式通过真空吸附的方式去除所述光罩21表面的异物,一方面,可以有效的去除所述异物;另一方面,也避免了吹扫等方式将异物吹扫至曝光装置内部其他位置、从而对曝光装置内部的其他结构组件造成污染的风险,确保了所述曝光装置内部的洁净度。
另外,所述清洁组件还可以包括处理器,所述处理器连接所述真空泵122和所述真空吸附部件121,用于根据所述异物信息,例如所述异物的尺寸大小,自动调整所述真空吸附部件121的真空度,从而更加高效的去除所述光罩21表面的异物。例如,当所述处理器根据所述异物信息确认所述光罩21表面的所述异物的尺寸大于第一预设尺寸且小于第二预设尺寸时,则自动调整所述真空泵122至第一预设真空度范围,进而使得所述真空吸附部件121的真空吸附力调整至第一预设真空吸附力范围;所述处理器根据所述异物信息确认所述光罩21表面的所述异物的尺寸大于所述第二预设尺寸时,则自动调整所述真空泵122至第二预设真空范围,进而使得所述真空吸附部件121的真空吸附力调整至第二预设真空吸附力范围,所述第二预设真空范围的真空度高于所述第一预设真空范围的真空度,所述第二预设真空吸附力范围大于所述第一预设真空吸附力范围。
可选的,所述基座23内还具有驱动器123,所述驱动器123连接所述真空吸附部件121,用于驱动所述真空吸附部件121朝向所述光罩21表面的颗粒物运动,所述运动包括伸缩运动、沿垂直于所述光罩21方向的升降运动、沿平行于所述光罩21所在平面的平移运动、以及在一预设角度范围内的摆动中的一种或两种以上的组合。
举例来说,所述真空吸附部件121包括第一子臂241、第二子臂242和第三子臂243,所述第一子臂241的一端连接所述基座23、另一端连接所述第二子臂242的一端,所述第二子臂242的另一端连接所述第三子臂243的一端,所述第三子臂243的另一端具有用于真空吸附所述光罩21表面的异物22的吸附口。所述第一子臂241沿竖直方向(即垂直于所述光罩21的方向)延伸,能够沿竖直方向进行升降运动,从而调整所述第三子臂243中所述吸附口的高度。所述第二子臂242能够围绕其与所述第一子臂241的连接端在一预设角度范围内转动或者摆动,以调整所述第三子臂243中的所述吸附口相对于所述光罩21所在平面的水平位置。所述第三子臂243能够沿其轴向方向进行伸缩运动,以调整所述吸附口与所述光罩21表面上的异物的距离。通过设置所述第一子臂241、所述第二子臂242和所述第三子臂243,可以有效避免在所述曝光装置内部设置过多的导轨等组件,简化了曝光装置内部的结构。其中,所述一子臂241、所述第二子臂242和所述第三子臂243可以均为真空吸附管。
不仅如此,本具体实施方式还提供了一种光罩清洁方法,附图4是本发明具体实施方式中光罩清洁方法的流程图。本具体实施方式的光罩清洁方法可以在如图1-图3所示的曝光装置中实施。如图1-图4所示,所述光罩清洁方法,包括如下步骤:
步骤s41,传输光罩21至曝光装置内部;
步骤s42,发射检测信号检测所述光罩21表面的异物信息;
步骤s43,判断所述光罩21表面是否存在异物22,若是,则于所述曝光装置内除去所述光罩21表面的异物22。
可选的,发射检测信号检测所述光罩21表面的异物信息的具体步骤包括:
发射探测信号至所述光罩21表面;
接收自所述光罩21表面传回的探测信号;
根据发射的探测信号和接收到的探测信号获取所述光罩21表面的异物信息。
可选的,发射探测信号至所述光罩21表面的具体步骤包括:
同时发射多探测信号至所述光罩21表面,使得所述探测信号覆盖所述光罩21的整个表面。
可选的,于所述曝光装置内除去所述光罩21表面的异物的具体步骤包括:
提供真空吸附部件121;
根据所述异物信息驱动所述真空吸附部件121朝向所述光罩21表面的异物运动,定向移除所述光罩表面的异物。
本具体实施方式提供的曝光装置及光罩清洁方法,通过检测组件检测位于曝光机台内部的光罩表面的异物信息,并根据所述异物信息,利用位于所述曝光装置内部的清洁组件直接、定向去除所述光罩表面的异物,避免了将光罩取出、在曝光机台外部进行清洁的繁琐操作以及二次污染的风险,提高了光罩清洁的效率,从而相应提高了曝光装置的机台产能。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 还没有人留言评论。精彩留言会获得点赞!