一种基于高通滤波的遮挡物散射成像系统
1.本发明涉及散射成像领域,特别涉及一种基于高通滤波的遮挡物散射成像系统。
背景技术:
2.散射成像技术已从早期的基础理论研究发展到了实验室中的模型验证研究,继而又发展到了透过散射介质成像的应用研究。早期的散射成像技术注重于克服散射或抑制散射,通过弹道光与散射光的分离,最终获取有效的目标信息。现阶段的散射成像技术则侧重于散射光的利用,充分挖掘散射光的特性,实现从不可探测到可探测的质的飞跃。值得注意的是,散射成像技术不仅在显微成像和超分辨成像方面有着广泛的应用,而且也将在全息成像、光纤成像和光通信等领域扮演着重要的角色。
3.散射在光的成像过程中无法避免,传统的光学成像技术很难解决散射引起的光波前畸变及图像失真等问题。近年来,大量的研究成果表明充分利用散射效应的成像技术可以实现透过散射介质或复杂介质成像,且具有超分辨的特性。
技术实现要素:
4.本发明的目的在于克服现有技术缺陷,提出了一种基于高通滤波的遮挡物散射成像系统。
5.本发明提出了一种基于高通滤波的遮挡物散射成像系统,设置于待成像物体和墙壁之间,所述系统包括:光源、遮挡物、探测器、高通滤波模块和重建三维成像模块;其中,
6.所述光源,用于发出光束照射到墙壁;
7.所述遮挡物,用于接收经墙壁漫反射的光路,一部分光子被吸收,其余光路到达待成像物体;
8.所述探测器,用于按照一定时序同步曝光拍摄,得到每次曝光拍摄的面阵数据信号,并发送至高通滤波模块;
9.所述高通滤波模块,用于对面阵数据信号进行高通滤波处理,并发送至重建三维成像模块;
10.所述重建三维成像模块,用于根据接收的滤波信号进行三维重建,得到待成像物体的三维成像。
11.作为上述系统的一种改进,所述探测器为具有空间分辨能力的飞行时间相机。
12.作为上述系统的一种改进,所述高通滤波模块的具体实现过程为:
13.接收探测器采集的面阵数据信号;
14.根据光场强度的平均值设置第一阈值;
15.根据即时光场的最大值设置第二阈值;
16.对收到的面阵数据信号分别与第一阈值和第二阈值进行比较,将同时满足大于第一阈值和第二阈值的面阵数据信号输出至重建三维成像模块。
17.作为上述系统的一种改进,所述光源为面光源。
18.作为上述系统的一种改进,所述遮挡物为黑色,数量为一个或多个。
19.与现有技术相比,本发明的优势在于:
20.1、本发明的系统明显提高了在散射成像中光通过几次传播衰减之后图像的分辨率低、信噪比低等问题,使用遮挡物和高通滤波后极大地抑制了杂散光对成像时的干扰,很大程度上提高了图像的分辨率,信噪比,对比度等,本系统可广泛应用于国防、军事、遥感,通讯、生物医学等众多需要高质量成像技术的领域;
21.2、本发明的系统通过使用飞行时间相机作为探测器具有成像速度快、成本低、结构复杂度低等优点;可以滤掉大部分环境光,使系统的成像不受自然光的影响;
22.3、采用本发明的系统很大程度解决了在成像时因探测器的视野范围小,而无法对大视野的物体进行三维成像的问题,为大视野的三维成像奠定了一定的基础;
23.4、本发明的系统保留了传统散射成像技术的全部优势,可以用于升级各种真热光源或赝热光源以及空间调制光源的散射成像技术的成像质量;
24.5、本发明的系统结构简单、易于操作,相比传统散射成像的实验结构没太大改变,只是在散射成像基础上加入了遮挡物,在软件方面加入了高通滤波,便可有效提高成像质量;
25.6、本发明的系统在数据处理上对有遮挡物,遮挡物大小,一个遮挡物与多个遮挡物,遮挡物与探测器的距离等因素上对收集到的图像进行高通滤波算法的处理,将得到的图像质量对比,使用本发明可以有效提高成像质量;
26.7、本发明可用于非视域成像系统结合在与对应的软件算法结合,可以有效地提高成像质量,在高质量,大视野,快速实时成像领域具有非常大的应用前景。
附图说明
27.图1是本发明实施例1的基于高通滤波的一个遮挡物散射成像系统的框图;
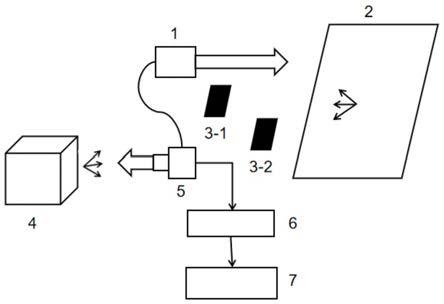
28.图2是本发明实施例2的基于高通滤波的多个遮挡物散射成像系统的框图。
29.附图标记
30.1、光源
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2、墙壁
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3、遮挡物
31.3-1、第一遮挡物
ꢀꢀꢀꢀꢀꢀꢀꢀ
3-2、第二遮挡物
ꢀꢀꢀꢀꢀꢀ
4、待成像物体
32.5、探测器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6、空间滤波器
ꢀꢀꢀꢀꢀꢀꢀꢀ
7、重建三维成像模块
具体实施方式
33.本发明的一个目的是为了解决传统的散射成像的低成像质量问题,提供了基于高通滤波的遮挡物散射成像方法。可以实现待测物体的图像高分辨率、高对比度、高信噪比,不仅高质量、并且可以大视野、快速实时成像。
34.本发明的技术解决方案是:基于高通滤波的遮挡物散射成像系统,包括光源、探测器、遮挡物、高通滤波器和重建三维成像,设置在墙壁和待成像物体之间。
35.从光源发射的一束激光经过一段自由空间,到达漫反射墙壁上,在墙壁前面放置一个黑色的,矩形遮挡物,遮挡物为一个与多个,墙壁上反射回来的光通过遮挡物一部分光子被遮挡物吸收,减少了多路径干扰,固定遮挡物与探测器的位置,依次改变遮挡物的大小;确定遮挡物的大小,纵向改变遮挡物与探测器的距离;光路经过待测物体后的光场强度
空间分布信号i(x)被具有空间分辨能力的面阵探测器将信号收集得到待测物体的像,将其输入到空间滤波器中,输出的滤波信号接入到用于重建三维待成像物体的系统。
36.下面结合附图和实施例对本发明的技术方案进行详细的说明。
37.实施例1
38.如图1所示,本发明的实施例1提出了一种基于高通滤波的一个遮挡物散射成像系统。系统中包括:光源1、遮挡物3、探测器5、高通滤波模块6和重建三维成像模块7。该系统设置在待成像物体4和墙壁2之间。具体工作原理是:光路中光源1发射的一束激光经过一段自由空间,到达墙壁2上,经墙壁2漫反射到达遮挡物3,一部分光子被遮挡物3吸收,其余光通过反射光路到达待成像物体4,之后待成像物体的光场强度空间分布信号i(x)被具有空间分辨能力的面阵探测器5收集,将其输入到高通滤波器中,输出的滤波信号接入到用于重建三维待成像物体的系统。光源可以是热光、赝热光、空间调制光等多种光源。探测器为具有空间分辨能力的飞行时间相机,本实施例使用的飞行时间相机的光源为4个850nm的红外激光二极管,光子透过毛玻璃发散的照射整个场景;相机的镜头处装有红外滤光片,可以滤掉大部分环境光,不受自然光的影响。
39.高通滤波模块的具体实现过程为:接收探测器采集的面阵数据;根据光场强度的平均值设置第一阈值;根据即时光场的最大值设置第二阈值;对收到的面阵数据信号分别与第一阈值和第二阈值进行比较,将同时大于第一阈值和第二阈值的面阵数据信号输出至重建三维成像模块。
40.实施例2
41.如图2所示,本发明的实施例2提出了一种基于高通滤波的一个遮挡物散射成像系统。系统中包括:光源1、第一遮挡物3-1、第二遮挡物3-2、探测器5、高通滤波模块6和重建三维成像模块7,该系统设置在待成像物体4和墙壁2之间。具体工作原理是:光路中光源1发射的一束激光经过一段自由空间,到达墙壁2上,经墙壁2漫反射到达遮挡物3,一部分光子被遮挡物3吸收,其余光通过反射光路到达待成像物体4,之后待成像物体的光场强度空间分布信号i(x)被具有空间分辨能力的面阵探测器5收集,将其输入到高通滤波器中,输出的滤波信号接入到用于重建三维待成像物体的系统。光源可以是热光、赝热光、空间调制光等多种光源。需要说明的是,遮挡物不限于2个,还可以2个以上。探测器为具有空间分辨能力的探测器。
42.高通滤波模块的具体实现过程为:接收探测器采集的面阵数据;根据光场强度的平均值设置第一阈值;根据即时光场的最大值设置第二阈值;对收到的面阵数据信号分别与第一阈值和第二阈值进行比较,将同时大于第一阈值和第二阈值的面阵数据信号输出至重建三维成像模块。
43.实验分析:分别采用实施例1的系统和实施例2的系统进行以下实验:
44.在实施例1的系统中设置一个黑色的,矩形遮挡物,墙壁上反射回来的光通过遮挡物一部分光子被遮挡物吸收,减少了多路径干扰,固定遮挡物与探测器的位置,依次改变遮挡物的大小,这里设置的遮挡物共有5组:6cm*5cm;11cm*9cm;16cm*14cm;21cm*19cm;6cm*24cm;
45.确定遮挡物的大小,纵向改变遮挡物与探测器的距离,距离设置了5组:22.5cm;30cm;37.5cm;45cm;52.5cm,每组距离间隔7.5cm;没有遮挡物时的散射成像;采用实施例2
的系统设置多个遮挡物;光路经过待测物体后的光场强度空间分布信号i(x)被具有空间分辨能力的面阵探测器将信号收集得到待测物体的像。
46.遮挡物数量,遮挡物的大小、形状可以自己设计,遮挡物颜色尽量选黑色,其它颜色会让光继续反射增加了实验中的多路径干扰,遮挡物的大小设置太大,被遮挡物吸收的光子太多,探测器收集的有用信息会变少,不同遮挡物实验效果不同。
47.本实验使用飞行时间(tof)传感器中型号是opt8241这款飞行时间相机。该传感器将tof感应功能与经优化设计的模数转换器(adc)和通用可编程定时发生器(tg)相结合。该器件以高达150帧秒的帧速率(600读出秒)提供四分之一的视频图形阵列(qvga 320x240)分辨率数据。实验中采用4个波长为850nm的红外激光二极管作为光源,经毛玻璃散射成光束,并在相机镜头前加入红外滤光片极大的减少了环境光的影响。实验中使用的遮挡物是黑色的、矩形,遮挡物的形状可以是矩形、圆形、或者三角形。实验中设置了5组不同大小的遮挡物,使用控制变量法依次进行实验。
48.实验中使用控制变量法,具体步骤如下:
49.1)在保持光路中其他条件不变的情况下,固定遮挡物与探测器的相对位置,使遮挡物由小到大依次变化,然后对通过光路由其反射散射的光场强度分布按照遮挡物一定的大小顺序逐个进行一定时间的曝光拍摄,并将其每次曝光获得的数据依次输出到对应的数据库中并存储。
50.2)在保持光路中其他条件不变的情况下,固定遮挡物的大小,改变遮挡物与探测器的相对位置,使距离由远到近依次变化,然后对通过光路由其反射散射的光场强度分布按照遮挡物一定的大小顺序逐个进行一定时间的曝光拍摄,并将其每次曝光获得的数据依次输出到对应的数据库中并存储。
51.3)将光路中的遮挡物去掉,用探测器直接对待测物体进行成像,再将有无遮挡物,遮挡物的大小,遮挡物距离探测器的距离等,根据测量数据时光场的最大值、最小值和光场强度的平均值及实际的需要分别将探测器中输出的相位图,振幅图,深度图做一个系统的计算与比较。
52.4)所述光路中探测后的数据可作为输入,用高通滤波进行处理,即得到清晰的待测物体的像,将有无遮挡物的振幅图,相位图计算比较。
53.是对光路通过面阵探测器,探测到其反射散射的光场强度分布按照一定的时间序列同步进行一定时间的曝光拍摄,并将其每次曝光获得的数据输出依次接入对应的空间滤波器,并根据光场强度的平均值和即时光场的最大值分别为空间滤波器设定一个合适的阈值。然后根据阈值将每个时序点获得的面阵数据信号依次通过空间滤波器进行高通滤波运算,最后将光路获得的面阵数据按照三维重建的方法对待测物体实现三维重建并对成像质量参数进行评价。
54.5)将有无滤波、有无遮挡物、一个遮挡物与多个遮挡物、遮挡物大小的振幅图和相位图,计算均方误差其中i
ij
为有遮挡物探测器获得的图像矩阵,为无遮挡物探测器获得的图像。采用的相机的分辨率为240
×
320,m,n即分别为240,320,代表每行或每列的像素个数。计算信噪比snr=10*log10(sum(a(:).*a(:))/mse/numel
(b)),其中a是有遮挡物的图像,b是没有遮挡物的图像。计算峰值信噪比其中a是有遮挡物的图像,mse为均方误差值。峰值信噪比是一种全参考的图像评价参数。
55.遮挡成像可采用实验中遮挡处理、算法方面使用空间滤波器将实验得到的滤除一部分信号来代替遮挡处理或者二者的结合来实现。
56.本发明适用范围包括散射成像,非视域成像等。
57.本发明的遮挡物成像,高通滤波在对探测器收集到的面阵数据进行处理,在将处理后的数据可以逐一进行对比后发现加入遮挡物更有利于成像,随着遮挡物的变化成像质量也相应发生了变化。
58.最后所应说明的是,以上实施例仅用以说明本发明的技术方案而非限制。尽管参照实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,对本发明的技术方案进行修改或者等同替换,都不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1