相机模块的制作方法
相机模块
1.相关申请的交叉引用
2.本技术要求于2020年12月29日在韩国知识产权局提交的第10-2020-0185696号韩国专利申请的优先权权益,其全部公开内容出于所有目的通过引用并入本文。
技术领域
3.本公开涉及一种相机模块和包括该相机模块的移动设备。
背景技术:
4.相机可以用于移动设备,例如智能电话、平板pc、膝上型计算机等,并且可以向移动终端的相机添加自动聚焦功能(af)、图像稳定功能(ois)和变焦功能。
5.然而,为了实现各种功能,相机模块的结构可能是复杂的,并且相机模块的尺寸可能增加,使得安装有相机模块的移动设备的尺寸也可能增加。
6.此外,当透镜或图像传感器直接移动以进行图像稳定时,应当考虑透镜或图像传感器的重量以及透镜或图像传感器所附接的其它构件的重量,使得可能需要高于某一水平的驱动力,这可能增加功耗。
7.此外,为了实现自动聚焦功能(af)和变焦功能,应该确保预定的距离或更长距离,使得多个透镜镜筒可以在光轴方向上移动相对长的距离,并且不应该干扰多个透镜镜筒的光轴的对准。然而,在小尺寸和紧凑的相机结构中实现这种结构可能是困难的。
8.上述信息仅作为背景信息来呈现,以帮助理解本公开。关于上述中的任何内容是否可以作为关于本公开的现有技术适用,没有作出任何确定,并且没有作出断言。
技术实现要素:
9.提供本发明内容部分旨在以简要的形式介绍对发明构思的选择,而在下面的具体实施方式部分中将进一步描述这些发明构思。本发明内容部分不旨在确认所要求保护的主题的关键特征或必要特征,也不旨在用于帮助确定所要求保护的主题的范围。
10.在一个总的方面,一种相机模块包括具有内部空间的壳体,以及设置在内部空间中的第一透镜模块和第二透镜模块,第一透镜模块和第二透镜模块中的每一个配置为可在光轴方向上移动,其中,第一杆和第一滚珠构件设置在第一透镜模块和壳体之间,其中,第二杆和第二滚珠构件设置在第二透镜模块和壳体之间,以及其中,当每个透镜模块在光轴方向上移动时,滚动摩擦发生在每个透镜模块的两侧中的一侧,滑动摩擦发生在两侧中的另一侧。
11.第一透镜模块的两侧中的一侧可以由第一杆支撑,并且第一透镜模块的两侧中的另一侧可以由第一滚珠构件支撑,并且第二透镜模块的两侧中的一侧可以由第二滚珠构件支撑,并且第二透镜模块的两侧中的另一侧可以由第二杆支撑。
12.第一透镜模块的两侧中的一侧可以在光轴方向上具有比第一透镜模块的两侧中的另一侧更长的长度,并且第二透镜模块的两侧中的另一侧可以在光轴方向上具有比第二
透镜模块的两侧中的一侧的长度更长的长度。
13.第一磁体可以设置在第一透镜模块的一个侧表面上,并且包括多个线圈的第一线圈部分可以设置在与光轴方向垂直的方向上与第一磁体相对的位置,第二磁体可以设置在第二透镜模块的一个侧表面上,并且包括多个线圈的第二线圈部分可以设置在与光轴方向垂直的方向上与第二磁体相对的位置,以及第一透镜模块的一个侧表面和第二透镜模块的一个侧表面可以相对于光轴彼此相对地设置。
14.第一磁体的与第一线圈部分相对的一个表面可以在光轴方向上具有n极和s极,第二磁体的与第二线圈部分相对的一个表面可以在光轴方向上具有n极和s极,并且其感测值根据第一磁体的移动而在其间具有90度的相位差的两个位置传感器以及其感测值根据第二磁体的移动而在其间具有90度的相位差的两个位置传感器可以设置在壳体中。
15.被配置为在垂直于光轴方向的方向上产生磁力的磁性材料可以被设置在第一透镜模块和壳体的彼此相对的表面中的每一个上,并且被配置为在垂直于光轴方向的方向上产生磁力的磁性材料可以被布置在第二透镜模块和壳体的彼此相对的表面中的每一个上。
16.作用在第一透镜模块和壳体之间的磁力的中心可以设置成比第一滚珠构件更靠近第一杆,并且作用在第二透镜模块和壳体之间的磁力的中心可以设置成比第二滚珠构件更靠近第二杆。
17.第一杆和第二杆可以相对于光轴彼此相对地设置。
18.第一杆和第二杆可以设置在壳体的底面上并固定到壳体的底面。
19.第一透镜模块可包括其中可容纳第一杆的第一引导槽和其中可容纳第一滚珠构件的第二引导槽,并且第二透镜模块可包括其中可容纳第二轴的第三引导槽和其中可容纳第二滚珠构件的第四引导槽。
20.多个接触突起可以分别设置在第一引导槽和第三引导槽中,并且多个接触突起可以配置成相对于第一杆和第二杆滑动。
21.第一透镜模块和第二透镜模块中的每一个可由多个接触突起中的对应接触突起以及第一滚珠构件和第二滚珠构件中的对应滚珠构件在三个点处支撑。
22.相机模块还可以包括反射模块和图像传感器模块,反射模块配置为改变光的路径,使得光可以被导向第一透镜模块和第二透镜模块,图像传感器模块包括图像传感器,图像传感器配置为接收通过第一透镜模块和第二透镜模块的光。
23.反射模块可以配置为可围绕作为旋转轴的、垂直于光轴的第一轴和垂直于光轴和第一轴的第二轴旋转。
24.图像传感器可以配置为在垂直于光轴的第一轴上和垂直于光轴和第一轴的第二轴上是可移动的。
25.配置为限制第一透镜模块的移动距离的第一止挡件和配置为限制第二透镜模块的移动距离的第二止挡件可以设置在壳体中,并且第一止挡件可以设置为按压第一杆的两端,并且第二止挡件可以被设置为按压第二杆的两端。
26.在另一个总的方面,一种相机模块包括:壳体,具有面对第二侧的第一侧,第一侧和第二侧之间具有内部空间;第一透镜镜筒和第二透镜镜筒,沿着光轴方向设置在内部空间中;第一杆和第一滚珠构件,设置在第一透镜镜筒和壳体之间;以及第二杆和第二滚珠构件,设置在第二透镜镜筒和壳体之间,其中,第一杆设置为比第一滚珠构件更靠近第一侧,
以及其中,第二杆设置为比第二滚珠构件更靠近第二侧。
27.第一透镜镜筒可以可移动地设置在第一杆和第一滚珠构件上以在光轴方向上移动,并且第二透镜镜筒可以可移动地设置在第二杆和第二滚珠构件上以在光轴方向上移动。
28.第一透镜镜筒可以在光轴方向上彼此间隔开的两个滑动区域中支撑在第一杆上,并且在一个滚动区域中支撑在第一滚珠构件上。
29.第一透镜镜筒可以包括在每个滑动区域中可滑动地接触第一杆的一对突起,以及容纳在滚动区域中可旋转的第一滚珠构件的槽。
30.突起可以设置在第一透镜模块上的槽中。
31.第一杆可以包括一对杆,并且第一透镜镜筒可以包括在每个滑动区域中可滑动地接触该一对杆的突起,以及容纳在滚动区域中可旋转的第一滚珠构件的槽。
32.第一透镜镜筒的面对第一侧设置的一侧可以可滑动地支撑在第一杆上,并且第一透镜镜筒的面对第二侧设置的一侧可以支撑在第一滚珠构件上,其中第一滚珠构件可以是可旋转的,并且第二透镜镜筒的面对第二侧设置的一侧可以可滑动地支撑在第二杆上,并且第二透镜镜筒的面对第一侧设置的一侧可以支撑在第二滚珠构件上,其中第二滚珠构件可以是可旋转的。
33.第一透镜镜筒的面对第一侧设置的一侧可以在光轴方向上具有比第一透镜镜筒的面对第二侧设置的一侧更长的长度,并且第二透镜镜筒的面对第二侧设置的一侧可以在光轴方向上具有比第二透镜镜筒的面对第一侧设置的一侧更长的长度。
34.第一线圈可以沿光轴方向设置在第一侧上,并且第一磁体可以设置在与第一线圈相对的第一透镜镜筒上,并且第二磁体可以设置在第二透镜镜筒的面向第二侧设置的一侧上,并且第二线圈可以与第二磁体相对地设置在光轴方向上。
35.在另一个总的方面,一种相机模块包括:第一透镜镜筒,能够滑动地设置在沿光轴方向设置的第一杆上;以及第二透镜镜筒,与第一杆间隔开并且能够滑动地设置在沿光轴方向设置的第二杆上,其中,第一透镜镜筒和第二透镜镜筒设置在光轴上。
36.相机模块还可以包括可旋转且分别在垂直于光轴方向的方向上与第一杆和第二杆间隔开的第一滚珠构件和第二滚珠构件,其中第一透镜镜筒可以设置在第一滚珠构件上,并且第二透镜镜筒可以与第一滚珠构件间隔开并且设置在第二滚珠构件上。
37.第一滚珠构件可包括两个或多个可旋转的滚珠构件,第二滚珠构件可包括两个或多个可旋转的滚珠构件。
38.第一透镜镜筒的第一侧可以在光轴方向上具有比第一透镜镜筒的与第一侧相对的第二侧更长的长度,第二透镜镜筒的第二侧可以在光轴方向上具有比第二透镜镜筒的与第二侧相对的第一侧更长的长度,并且第一透镜镜筒和第二透镜镜筒的第一侧可以面向与光轴方向垂直的基本上相同的方向。
39.连接第一透镜镜筒的第一侧和第二侧的下表面可以设置在第一杆和第一滚珠构件上,第一杆可以设置成比第一滚珠构件更靠近第一透镜镜筒的第一侧,并且下表面可以在两个位置支撑在第一杆上并且在一个位置支撑在第一滚珠构件上以形成支撑三角。
40.在朝向第一杆和第一滚珠构件的方向上推动第一透镜模块的磁力的中心可以设置在支撑三角内。
41.根据所附附图、权利要求书和以下具体实施方式,其它特征和方面将是显而易见的。
附图说明
42.图1是示出根据本公开的示例性实施例的移动设备的立体图。
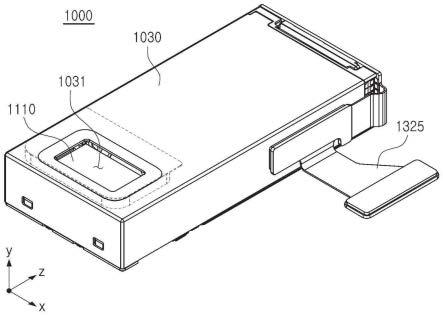
43.图2是示出根据本公开的示例性实施例的相机模块的立体图。
44.图3是示出图2中的相机模块的、其中盖被拆卸的分解立体图。
45.图4a和图4b是示出根据本公开的其它示例性实施例的相机模块的立体图。
46.图5是示出根据本公开的示例性实施例的从侧表面获取的相机模块的剖视图。
47.图6是示出根据本公开的示例性实施例的从上面截取的相机模块的剖视图。
48.图7是示出根据本公开的示例性实施例的相机模块的分解立体图。
49.图8是示出根据本公开的示例性实施例的相机模块的壳体的立体图。
50.图9是示出根据本公开的示例性实施例的其中反射模块和透镜模块联接到壳体的相机模块的立体图。
51.图10是示出根据本公开的另一示例性实施例的其中反射模块和透镜模块联接到壳体的相机模块的立体图。
52.图11a是示出根据本公开的示例性实施例的相机模块的立体图,其中,其上安装有驱动线圈和位置传感器的主板联接到壳体。
53.图11b是示出根据本公开的示例性实施例的其中主板联接到反射模块的相机模块的立体图。
54.图12是示出根据本公开的示例性实施例的相机模块的旋转板和旋转支架的分解立体图。
55.图13是示出根据本公开的另一示例性实施例的相机模块的旋转板和旋转支架的分解立体图。
56.图14是示出根据本公开的示例性实施例的相机模块的壳体和旋转支架的分解立体图。
57.图15是示出根据本公开的另一示例性实施例的相机模块的壳体和旋转支架的分解立体图。
58.图16是示出根据本公开的示例性实施例的壳体和透镜镜筒的分解立体图。
59.图17是示出根据本公开的示例性实施例的壳体的平面图。
60.图18a是示出根据本公开的示例性实施例的其中透镜镜筒由壳体支撑的结构的立体图。
61.图18b是示出了根据本公开的另一示例性实施例的结构的立体图,在该结构中,透镜镜筒联接到支架并且由壳体支撑。
62.图19a至图24b是示出根据本公开的各种示例性实施例的结构的立体图,在该结构中,联接到支架的透镜镜筒由壳体支撑。
63.图25是示出根据本公开的示例性实施例的透镜镜筒安装在壳体中的形状的图。
64.图26是示出根据本公开的示例性实施例的当整个透镜镜筒朝向反射模块移动时的形状的图。
65.图27是示出根据本公开的示例性实施例的当整个透镜镜筒朝向图像传感器模块移动时的形状的图。
66.图28是示出根据本公开的示例性实施例的安装有旋转支架的阻尼器和透镜镜筒的止挡件的示例的立体图。
67.图29是示出了图28中的旋转支架的阻尼器和透镜镜筒的止挡件被拆卸的示例的分解立体图。
68.图30是示出根据本公开的示例性实施例的设置在变焦透镜镜筒中的止挡件的立体图。
69.图31a是示出根据本公开的示例性实施例的阻尼器的立体图。
70.图31b是示出根据本公开的示例性实施例的止挡件的形状的立体图。
71.图32是示出根据本公开的示例性实施例的止挡件安装位置的立体图。
72.图33至图35是示出根据本公开的示例性实施例的其中安装有止挡件的结构的立体图。
73.图36是示出根据本公开的示例性实施例的止挡件连接到杆的结构的立体图。
74.图37和图38是示出根据本公开的示例性实施例的杆固定到壳体的结构的立体图。
75.图39是示出根据本公开的示例性实施例的当固定透镜镜筒存在于透镜镜筒之中时确定固定透镜镜筒在光轴方向上的位置的形状的图。
76.图40是示出根据本公开的示例性实施例,当固定透镜镜筒存在于透镜镜筒之中时,确定固定镜筒在垂直于光轴方向的方向上的位置的形状的图。
77.图41是示出根据本公开的另一示例性实施例的具有传感器移位结构的相机模块的立体图。
78.图42a是示出根据本公开的另一示例性实施例的应用于相机模块的传感器移位结构的立体图。
79.图42b是示出根据本公开的另一示例性实施例的应用于相机模块的传感器移位结构的剖视图。
80.图43a是示出根据本公开的另一示例性实施例的应用于相机模块的传感器移位结构的立体图。
81.图43b是示出根据本公开的另一示例性实施例的应用于相机模块的传感器移位结构的剖视图。
82.图44是示出根据本公开的另一示例性实施例的具有压电致动器结构的相机模块的立体图。
83.图45是示出根据本公开的示例性实施例的设置在透镜镜筒中的磁体和位置传感器之间的位置关系的图。
84.图46是示出根据本公开的示例性实施例的位置传感器(霍尔传感器)和磁体之间的位置关系的图。
85.图47是示出根据透镜镜筒在图46所示的位置关系中的移动的、两个位置传感器(霍尔传感器)的感测值的曲线图。
86.图48是示出使用图47所示的感测值作为反正切的值的曲线图。
87.图49是示出根据本公开的示例性实施例的位置传感器(tmr角度传感器)和磁体之
间的位置关系的图。
88.图50是示出图49所示的tmr角度传感器的定位的图。
89.图51是示出根据透镜镜筒在图49所示的位置关系中的移动的、两个位置传感器(tmr角度传感器)的感测值以及感测值的反正切的曲线图。
90.图52a和图52b是示出根据本公开的其它示例性实施例的位置传感器(tmr角度传感器)和感测磁体之间的位置关系的图。
91.图53是示出根据透镜镜筒在图49所示的位置关系中的移动的、两个位置传感器(tmr角度传感器)的感测值以及感测值的反正切的曲线图。
92.图54a和图54b是示出根据本公开的其它示例性实施例的位置传感器(霍尔传感器或通用tmr角度传感器)和感测磁体之间的位置关系的图。
93.图55是示出根据透镜镜筒在图54b所示的位置关系中的移动的、两个位置传感器(通用tmr传感器)的感测值以及感测值的加权减法值的曲线图。
94.图56是示出根据本公开的另一示例性实施例的单个位置传感器(霍尔传感器或通用tmr角度传感器)和感测磁体之间的位置关系的图。
95.图57是示出根据本公开的另一示例性实施例的两个位置传感器(霍尔传感器或通用tmr角度传感器)和感测磁体之间的位置关系的图。
96.图58是示出根据透镜镜筒在图54b所示的位置关系中的移动的、两个位置传感器(霍尔传感器或通用tmr角度传感器)的感测值以及感测值的加权减法值的曲线图。
97.在所有附图和具体实施方式中,相同的附图标记表示相同的元件。附图可能不是按比例绘制的,并且为了清楚、说明和方便,附图中的元件的相对尺寸、比例和描绘可能被夸大。
具体实施方式
98.在下文中,虽然将参考附图详细描述本公开的示例,但是应当注意,示例不限于此。
99.提供以下具体实施方式以帮助读者获得对本文中所描述的方法、设备和/或系统的全面理解。然而,本文中所描述的方法、设备和/或系统的各种改变、修改和等同物在理解本技术的公开内容之后将是显而易见的。例如,除了必须以特定顺序发生的操作之外,本文中所描述的操作的顺序仅仅是示例,并且不限于在本文中所阐述的顺序,而是可以做出在获得对本技术的公开内容的理解之后将是显而易见的改变。此外,为了更加清楚和简洁,可能省略本领域公知特征的描述。
100.本文中所描述的特征可以以不同的形式实施,而不应被理解为限于本文中所描述的示例。相反,本文中所描述的示例仅被提供来说明在理解本技术的公开内容之后将显而易见的实现本文中所描述的方法、装置和/或系统的许多可能的方式中的一些。
101.本文中,应注意的是,相对于实施方式或示例的术语“可以”的使用(例如,关于实施方式或示例可包括或实现什么)意味着存在其中包括或实现这种特征的至少一个实施方式或示例,但所有实施方式和示例都不限于此。
102.在整个说明书中,当诸如层、区域或基板的元件被描述为位于另一个元件“上”、“连接到”或“联接到”另一个元件时,该元件可直接位于另一个元件“上”、直接“连接到”或
直接“联接到”另一个元件,或者可存在介于该元件与该另一个元件之间的一个或多个其它元件。相反地,当元件被描述为“直接位于”另一个元件“上”、“直接连接到”或“直接联接到”另一个元件时,则不存在介于该元件与该另一个元件之间的其它元件。
103.如本文中所使用的,措辞“和/或”包括相关联的所列项目中的任何一项以及任何两项或更多项的任何组合;同样,
“……
中的至少一个”包括相关联的所列项目中的任何一项以及任何两项或更多项的任何组合。
104.尽管在本文中可以使用诸如“第一”、“第二”和“第三”的措辞来描述各种构件、部件、区域、层或部分,但是这些构件、部件、区域、层或部分不受这些措辞的限制。更确切地,这些措辞仅用于将一个构件、部件、区域、层或部分与另一个构件、部件、区域、层或部分区分开。因此,在不背离本文中所描述示例的教导的情况下,示例中提及的第一构件、第一部件、第一区域、第一层或第一部分也可以被称作第二构件、第二部件、第二区域、第二层或第二部分。
105.诸如“在
……
之上”、“较上”、“在
……
之下”和“较下”的空间相对措辞可以在本文中为了描述便利而使用,以描述如附图中示出的一个元件相对于另一个元件的关系。除了涵盖附图中所描绘的定向之外,这些空间相对措辞旨在还涵盖装置在使用或操作中的不同的定向。例如,如果附图中的装置翻转,则描述为位于另一个元件“之上”或相对于另一个元件“较上”的元件将位于该另一个元件“之下”或相对于该另一个元件“较下”。因此,根据装置的空间定向,措辞“在
……
之上”涵盖“在
……
之上”和“在
……
之下”两种定向。该装置还可以以其它方式定向(例如,旋转90度或处于其它定向),并且本文中使用的空间相对措辞应被相应地解释。
106.本文中使用的术语仅用于描述各种示例,而不用于限制本公开。除非上下文另有明确指示,否则冠词“一”、“一个”和“该”旨在也包括复数形式。措辞“包括”、“包含”和“具有”说明所陈述的特征、数字、操作、构件、元件和/或它们的组合的存在,但不排除一个或多个其它特征、数字、操作、构件、元件和/或它们的组合的存在或添加。
107.由于制造技术和/或公差,附图中所示的形状可能发生变化。因此,本文中所描述的示例不限于附图中所示的特定形状,而是包括在制造期间发生的形状变化。
108.本文中所描述的示例的特征可以以各种方式组合,这些方式在理解本公开之后将是显而易见的。此外,尽管本文中所描述的示例具有多种配置,但是在理解本公开之后将显而易见的是,其它配置也是可能的。
109.本公开的一个方面提供了一种相机模块,其可以实现诸如自动聚焦调整、变焦和光学图像稳定的功能,可以具有简化的结构,并且可以具有减小的尺寸。
110.本发明的一个方面提供了一种相机模块,其中,即使当提供多个透镜组时,该多个透镜组也可以容易地在光轴方向上对准。
111.本公开的一个方面提供了一种相机模块,其中在光轴方向上移动的多个透镜组可以容易地在光轴方向上移动以实现变焦功能。
112.本发明的一个方面提供了一种相机模块,其中,可以防止变焦透镜和反射模块与驱动位置分离以及由于碰撞而损坏。
113.本发明的一个方面提供了一种相机模块,其中,可以精确地感测变焦透镜的移动位置,以使变焦透镜的性能最大化。
114.(图1)-移动设备
115.图1是示出根据示例性实施例的移动设备的立体图。
116.参照图1,示例性实施例中的移动设备1可以被实现为诸如包括多个相机模块500和1000的移动设备,例如移动通信终端、智能电话和平板pc。
117.在示例性实施例中,多个相机模块500和1000可以安装在移动设备1上。多个相机模块500和1000可以被布置成如图所示水平对准,或者可以被布置成竖直对准,尽管未示出。
118.或者,示例性实施例中的移动设备1可以仅包括相机模块1000,相机模块1000可以具有示例性实施例中所描述的变焦功能。
119.在示例性实施例中,多个相机模块500和1000中的至少一个可以被配置为参考包括图2的附图进行描述的相机模块1000。也就是说,具有双相机模块的移动设备可以包括两个相机模块中的至少一个,如示例性实施例中所述的相机模块1000。
120.在示例性实施例中,相机模块和包括相机模块的移动设备可以实现诸如自动聚焦调整、变焦和光学图像稳定的功能,可以具有简化的结构和减小的尺寸。此外,可以降低功耗。
121.移动设备1可以包括具有变焦功能的相机模块1000以对对象进行成像。
122.在示例性实施例中,相机模块1000可以包括多个透镜,并且多个透镜中的一个或多个透镜的光轴(z轴)可以指向垂直于移动设备1的厚度方向(y轴方向、从移动设备的前表面到后表面的方向、或相反方向)的方向。
123.例如,设置在相机模块1000中的多个透镜的光轴(z轴)可以在移动设备1的宽度方向或长度方向上形成。
124.因此,即使当相机模块1000包括诸如自动聚焦(下文称为af),变焦和光学图像稳定(ois)的功能时,移动设备1的厚度也不会增加。因此,可以减小移动设备1的厚度。
125.当使用两个相机模块时,光通过其入射到两个相机模块的入口孔可以彼此相邻地设置。
126.第一相机模块1000和第二相机模块500可以被配置为具有不同的视场。
127.第一相机模块1000可以被配置为具有相对较窄的视场(例如,远摄相机),并且第二相机模块500可以被配置为具有相对较宽的视场(例如,广角相机)。这里,第一相机模块1000可以对应于下面参考图2以外的附图描述的相机模块。
128.例如,第一相机模块1000的视场θ1可以在9
°
至35
°
的范围内形成,并且第二相机模块500的视场θ2可以在60
°
至120
°
的范围内形成。
129.通过如上所述不同地配置两个相机模块的视场,可以以不同的深度获得对象的图像,并且可以实现诸如组合或重叠图像的各种图像实现。
130.示例性实施例中的相机模块1000可以具有af、变焦和ois功能。此外,示例性实施例中的相机模块1000可以实现多个透镜镜筒在光轴方向上的相对长的移动行程,从而可以实现高性能的变焦功能。
131.具有af、变焦和ois功能的相机模块1000可以包括各种组件,并且因此,与普通相机模块相比,相机模块的尺寸可能增加。
132.然而,当相机模块1000的尺寸增大时,可能难以减小其上安装有相机模块1000的
移动设备1的尺寸。
133.例如,在相机模块中,当用于变焦功能的堆叠透镜的数目增加并且在移动设备的厚度方向上形成多个堆叠透镜时,移动设备的厚度可以根据堆叠透镜的数目而增加。因此,在不增加移动设备的厚度的情况下,堆叠透镜的数目可能不能被充分地保证,从而可以削弱变焦性能。
134.此外,为了实现af、变焦和ois功能,可能需要安装在光轴方向或垂直于光轴的方向上移动多个透镜组的致动器。然而,当透镜组的光轴(z轴)沿移动设备的厚度方向形成时,用于移动透镜组的致动器也可能需要沿移动设备的厚度方向安装。因此,移动设备的厚度可能增加。
135.然而,由于示例性实施例中的相机模块1000可以被设置成使得多个透镜的光轴(z轴)可以垂直于移动设备1的厚度方向,即使当安装了具有af、变焦和ois功能的相机模块1000时,移动设备1也可以具有减小的厚度。
136.(图2至图4b)-相机模块的总体描述
[0137]-实施例1-1(图2至图3)
[0138]
图2是示出根据示例性实施例的相机模块的立体图。图3是示出图2中的相机模块的、其中盖被拆卸的分解立体图。
[0139]
参照图2和图3,示例性实施例中的相机模块1000可以包括设置在壳体1010中的反射模块1100、透镜模块1200和图像传感器模块1300。
[0140]
反射模块1100可以被配置为改变光的行进方向。例如,从顶部通过覆盖相机模块1000的盖1030的开口1031入射的光的行进方向可以通过反射模块1100被导向透镜模块1200。为此,反射模块1100可以包括被配置为改变光路(例如,反射光)的光路改变构件1110。光路改变构件1110可以通过反射镜、棱镜、分束器等来实现。
[0141]
例如,在相机模块1000的厚度方向(y轴方向)上入射的光的路径可以通过反射模块1100改变为与光轴(z轴)方向基本一致。路径已经改变的光可以入射到透镜模块1200。
[0142]
透镜模块1200可以包括多个透镜,反射模块1100改变其行进方向的光通过这些透镜。透镜模块1200可以包括多个透镜模块(透镜镜筒)1210、1220和1230。在示例性实施例中,多个透镜镜筒的数量是三个,但是透镜镜筒的数量可以是一个或多个。
[0143]
自动聚焦(af)和变焦功能可以根据多个透镜镜筒1210、1220和1230中的至少一个在光轴方向(z轴)上的移动来实现。
[0144]
在示例性实施例中,全部三个透镜镜筒1210、1220和1230可以在光轴方向上移动,或者透镜镜筒中的透镜镜筒1230可以被固定以不在光轴方向上移动。自动聚焦(af)和变焦功能可以通过移动透镜镜筒1210和1220来实现。
[0145]
图像传感器模块1300可以包括将通过多个透镜的光转换为电信号的图像传感器1310和其上安装有图像传感器1310的印刷电路板1320。此外,图像传感器模块1300可以包括滤光器1340,用于过滤通过透镜模块1200入射的光。滤光器1340可以被实现为红外截止滤光器。
[0146]
在壳体1010的内部空间中,反射模块1100可以相对于透镜模块1200设置在透镜模块1200的前面,并且图像传感器模块1300可以设置在透镜模块1200的后面。
[0147]
此外,可以是主板1070和传感器板1320的板1320和1070可以被设置成向反射模块
1100的第一驱动器1140、透镜模块1200的第二驱动器1240和图像传感器模块1300的图像传感器1310供电,或者向上述部件发送控制信号或者从上述部件接收控制信号。并且可以设置连接到板1320和1070两者的单个端子1325。
[0148]-实施例1-2(图4a)
[0149]
示例性实施例中的相机模块1000可以包括其中在壳体1010中设置反射模块1100、透镜模块1200和图像传感器模块1300的结构,并且尽管在附图中未示出,但是除了在附图中示出的结构之外,相机模块1000还可以包括其中还包括反射模块和透镜模块的结构。
[0150]
图4a和图4b是示出根据其它示例性实施例的相机模块的立体图。
[0151]
参照图4a,另一个示例性实施例中的相机模块1001可以具有与上述示例性实施例中的相机模块1000相同的结构,并且可以为每个模块划分壳体。
[0152]
在下文中,为了便于描述,不同的附图标记(例如,本实施例中的“1001”,其它实施例中的“1002”或“1003”)可以用于示例性实施例中的每个相机模块,并且不同的示例被包括在示例性实施例中的相机模块“1000”中。
[0153]
即,根据示例性实施例的相机模块1000和1001两者可以包括反射模块1100、透镜模块1200和图像传感器模块1300,并且在前述示例性实施例中的相机模块1000中,反射模块1100、透镜模块1200和图像传感器模块1300可以设置在单个壳体1010中,或者可以仅单独设置图像传感器模块1300。
[0154]
然而,在另一示例性实施例中,在相机模块1001中,反射模块1100和透镜模块1200可以设置在单独的壳体中。也就是说,反射模块1100可以设置在第一壳体1010a中,并且透镜模块1200可以设置在第二壳体1010b中。
[0155]
图像传感器模块1300可以与透镜模块1200一起设置在第二壳体1010b中,或者可以单独设置在第三壳体1010c中。
[0156]
此外,多个第一壳体至第三壳体1010a、1010b和1010c可以在光轴(z轴)方向上按顺序对准,并且可以通过各种方法相互连接,例如使用相互粘合剂的接合、钩子方法的机械接合等。
[0157]
盖1030可以覆盖多个第一壳体至第三壳体1010a、1010b和1010c的整个上部,第一壳体至第三壳体1010a、1010b和1010c彼此集成在一起并相互连接在一起。尽管未示出,盖1030也可以为每个壳体分开,或者可以选择性地仅覆盖两个壳体。
[0158]
示例性实施例可以包括其中集成了壳体1010的结构或者其中提供了为每个模块划分的多个壳体1010a、1010b和1010c的结构,并且在下面的描述中,将描述其中集成了壳体1010的结构,并且其中划分了壳体的结构可以包括在示例性实施例中,尽管没有指示对壳体进行划分。
[0159]-实施例1-3(图4b)
[0160]
参照图4b,在另一示例性实施例中的相机模块1002可以具有与上述示例性实施例中的相机模块1000相同的结构,并且附加的光路改变构件1410可以设置在壳体1010中。
[0161]
也就是说,示例性实施例中的相机模块1000和1002都可以包括反射模块1100、透镜模块1200和图像传感器模块1300,并且在上述示例性实施例中的相机模块1000中,可以在单个壳体1010中设置单个反射模块1100。
[0162]
然而,除了第一反射模块1100之外,在另一示例性实施例中的相机模块1002还可
以包括用于改变光路的一个或多个第二反射模块1400。ois功能可以设置在多个反射模块1100和1400中的一个中,或者反射模块1100和1400可以分别负责ois功能的不同部分,即,例如,第一反射模块1100的光路改变构件可以相对于垂直于光轴的第一轴旋转地驱动,并且第二反射模块1400的光路改变构件可以相对于垂直于光轴和第一轴两者的第二轴旋转地驱动。
[0163]
在第一反射模块1100和第二反射模块1400中光路改变至少两次之后,入射到相机模块1002的光可以入射到图像传感器模块1300。
[0164]
(图5至图58)-相机模块的描述
[0165]-(图5至图15)反射模块
[0166]
参照图1至图15,示例性实施例中的相机模块1000可以包括设置在壳体1010中的反射模块1100、透镜模块1200和图像传感器模块1300。
[0167]
在下文中,将描述反射模块1100的结构,其可以改变入射到相机模块的光的路径并且可以执行光学图像稳定功能,并且将参考直到图16的其他附图来描述其他部件。
[0168]
在壳体1010中,反射模块1100、透镜模块1200和图像传感器模块1300可以从一侧设置到另一侧。
[0169]
壳体1010可以具有内部空间,反射模块1100、透镜模块1200和图像传感器模块1300插入其中。
[0170]
例如,如图所示,壳体1010可以是整体的,使得反射模块1100和透镜模块1200都被插入到内部空间中。然而,其示例性实施例不限于此,并且例如,如上所述,反射模块1100和透镜模块1200分别设置在其中的单独壳体可以彼此连接。
[0171]
壳体1010可以通过盖1030阻挡光,并且可以被覆盖,使得内部空间是不可见的。
[0172]
盖1030可以具有开口1031,光通过开口1031入射,并且通过开口1031入射的光的行进方向可以由反射模块1100改变,并且可以入射到透镜模块1200。盖1030可以是整体的以覆盖整个壳体1010,或者可以被分成分别覆盖反射模块1100和透镜模块1200的单独构件。
[0173]
反射模块1100可以包括被配置成反射光的光路改变构件1110。光路改变构件1110可以由棱镜、分束器或反射镜来实现。
[0174]
入射到透镜模块1200的光可以穿过多个透镜组(三个透镜镜筒1210、1220和1230),并且可以由图像传感器1310转换为电信号,并且可以存储该电信号。
[0175]
壳体1010可以包括内部空间中的反射模块1100和透镜模块1200。反射模块1100可以设置在壳体1010的内部空间的前侧上,即,邻近于光通过其入射的开口,并且透镜模块1200可以设置在邻近于其上形成光的图像传感器的位置中。
[0176]
壳体1010的其中设置有透镜模块1200的空间可以由第一突出壁1009分开。第一突出壁1009可配置成从两侧突出,从壳体1010的侧壁突出到内部空间中。
[0177]
反射模块1100可以包括旋转支架1120,并且壳体1010和与壳体1010相对的旋转支架1120可以分别在相对的表面上具有第一磁性材料1151和第二磁性材料1153,并且旋转支架1120可以通过第一磁性材料1151和第二磁性材料1153之间的吸引力由壳体1010支撑(与壳体1010紧密接触)。
[0178]
这里,第一磁性材料1151和第二磁性材料1153可以被配置为牵引轭和牵引磁体,
并且例如,第一磁性材料1151和第二磁性材料1153可以选择性地是牵引轭和牵引磁体,或者第一磁性材料1151和第二磁性材料1153都可以是牵引磁体。
[0179]
第一滚珠构件1131、旋转板1130和第二滚珠构件1133可以设置在壳体1010的内壁表面和旋转支架1120之间。
[0180]
第一滚珠构件1131和第二滚珠构件1133可以部分地插入到引导槽1132、1134、1021和1121中或与之紧密接触,并且因此,当旋转支架1120和旋转板1130插入到壳体1010的内部空间中时,在旋转支架1120和第一突出壁1009之间可能需要空间,并且在旋转支架1120安装在壳体1010中之后,旋转支架1120可以通过第一磁性材料和第二磁性材料的吸引力与壳体1010的内壁表面紧密接触,从而可以在旋转支架1120和第三透镜镜筒1230之间留下空间。
[0181]
因此,在示例性实施例中,可以设置插入壳体1010的第一突出壁1009中的阻尼器1050。
[0182]
阻尼器1050可插入壳体1010的第一突出壁1009中。
[0183]
例如,如图31a所示,阻尼器1050可以包括插入到第一突出壁1009中的框架1051和从框架1051延伸的延伸部分1052。延伸部分1052可包括在光轴方向上沿旋转支架1120的方向突出的阻尼材料1053。
[0184]
阻尼材料1053可以插入到设置在延伸部分1052中的通孔1055中,或者可以使用粘合剂连接到延伸部分1052,并且作为阻尼材料1053,可以使用任何弹性材料,例如氨基甲酸乙酯、硅树脂、环氧树脂或聚合体。
[0185]
壳体的第一突出壁1009可以包括插入槽1019,框架1051插入其中。钩形框架1051可以从第一突出壁1009的上部插入到下部,并且钩形框架可以被固定以便通过被第一突出壁1009的上部钩住而不移动。此外,可以在框架1051和壳体1010之间施加粘合剂,并且框架1051和壳体1010可以彼此结合。
[0186]
阻尼材料1053可设置成插入设置在延伸部分1052中的通孔中(阻尼材料1053可通过使用粘合剂粘结而附接到延伸部分1052的一个表面或两个表面),阻尼材料1053可设置成从延伸部分1052的一个表面或两个表面突出。阻尼材料1053可用作用于吸收旋转支架1120的冲击的阻尼器或用于限制其移动距离的止挡件。
[0187]
阻尼器1050可用作用于控制旋转支架1120的运动的止挡件或用于吸收其冲击的阻尼器。可以在阻尼器1050和旋转支架1120之间设置空间,使得旋转支架1120可以平滑地旋转。
[0188]
反射模块1100可以改变通过开口1031入射的光的路径。当拍摄图像或视频时,由于用户手抖,图像可能模糊或视频可能摇动,并且在这种情况下,反射模块1100可以通过移动其上安装有光路改变构件1110的旋转支架1120来校正用户手抖。
[0189]
例如,当在拍摄图像或视频期间由于用户手抖而发生摇晃时,可以通过向旋转支架1120提供与摇晃相对应的相对位移来补偿摇晃。
[0190]
在示例性实施例中,由于ois功能可以通过旋转支架1120的运动来实现,旋转支架1120由于旋转支架1120不包括透镜而具有相对轻的重量,因此可以降低功耗。
[0191]
也就是说,在示例性实施例中,为了实现光学图像稳定(ois)功能,可以通过移动包括光路改变构件1110的旋转支架1120而不移动包括多个透镜的透镜镜筒或图像传感器
来改变光的行进方向,使得已经经过光学图像稳定的光可以入射到透镜模块1200。
[0192]
反射模块1100可以包括由壳体1010朝向壳体1010支撑的旋转支架1120、安装在旋转支架1120上的光路改变构件1110、以及用于移动旋转支架1120的第一驱动器1140。旋转板1130可以设置在壳体1010和旋转支架1120之间。
[0193]
光路改变构件1110可以改变光的行进方向。例如,光路改变构件1110可以被实现为反射镜、棱镜,分光器等,被配置为反射光(为了便于描述,光路改变构件1110在图中被实现为棱镜)。
[0194]
光路改变构件1110可以固定到旋转支架1120。旋转支架1120可以包括安装表面1123,光路改变构件1110安装在该安装表面1123上。
[0195]
旋转支架1120的安装表面1123可以配置成倾斜表面,使得光的路径可以改变。例如,安装表面1123可以是相对于多个透镜的光轴(z轴)倾斜30至60度的倾斜表面。旋转支架1120的倾斜表面可以指向盖1030的开口1031,光通过该开口1031入射。
[0196]
其上安装有光路改变构件1110的旋转支架1120可移动地容纳在壳体1010的内部空间中。例如,旋转支架1120可以容纳在壳体1010中,以便能够相对于第一轴和第二轴旋转。这里,第一轴和第二轴可以垂直于光轴(z轴),并且第一轴和第二轴可以彼此垂直。例如,第一轴可以平行于图中所示的x轴,第二轴可以平行于图中所示的y轴。
[0197]
旋转支架1120可以由壳体1010基于与第一轴对准的第一滚珠构件1131和与第二轴对准的第二滚珠构件1133支撑向壳体1010,所述第一滚珠构件1131和第二滚珠构件1133置于旋转支架1120和壳体1010之间,使得旋转支架1120可以绕第一轴和第二轴平滑地旋转。
[0198]
在附图中,作为示例,可以设置与第一轴对准的两个第一滚珠构件1131和与第二轴对准的两个第二滚珠构件1133。旋转运动可以由第一驱动器1140相对于第一轴和第二轴执行。
[0199]
此外,第一滚珠构件1131和第二滚珠构件1133可以分别设置在旋转板1130的前表面和后表面上。或者,第一滚珠构件1131和第二滚珠构件1133的位置可以在旋转板1130的前后表面上切换,也就是说,第一滚珠构件1131可以与第二轴对准,而第二滚珠构件1133可以与第一轴对准。在下文中,为了便于描述,将描述附图中所示的结构。旋转板1130可以设置在旋转支架1120和壳体1010的内侧表面之间。
[0200]
通过设置在旋转支架1120中的第一磁性材料1151和设置在壳体1010中的第二磁性材料1153的吸引力,旋转支架1120可以通过旋转板1130由壳体1010支撑。
[0201]
示例性实施例中的旋转支架1120可以包括第一延伸部1129,第一延伸部1129的两侧可以在由壳体1010支撑的表面的方向上延伸。旋转板1130可以设置在设置于两侧上的第一延伸部1129之间。此外,壳体1010可以包括在壳体1010的内表面上沿光轴(z轴)方向凹入的入口部分1018,从而可以确保第一延伸部1129可以容易地在其中移动的空间。
[0202]
通过包括这种结构,可以确保可容易地设置两个磁体(1-1磁体1141a和1143a以及1-2磁体1145a和1147a),它们并排设置在旋转支架1120的侧表面上,并且通过将旋转支架1120和旋转板1130配置成在光轴(z轴)方向上彼此部分地重叠,可以确保其中可以充分延长变焦驱动器的长度的空间。
[0203]
此外,在示例性实施例中的旋转支架1120可以包括在朝向图像传感器的方向上的
凹部1128,其中安装有光路改变构件1110以减小在光轴(z轴)方向上占据的空间,并且可以包括在光轴(z轴)方向上朝向图像传感器突出的第二延伸部1127,同时光路改变构件1110安装在凹部1128之外的部分中。
[0204]
凹部1128可以在光轴(z轴)方向上与壳体1010的第一突出壁1009相对,并且第二延伸部1127的一部分可以设置在与第一突出壁1009在光轴(z轴)方向上相同的位置(即,第二延伸部1127和第一突出壁1009可以设置成在x轴方向上彼此重叠),或者可以邻近第一突出壁1009设置。
[0205]
第二延伸部1127可配置成具有小于在壳体1010的两侧上沿x轴方向所取的第一突出壁1009的端部之间的距离的尺寸。也就是说,第二延伸部1127在x方向上的宽度可以小于在两侧上的第一突出壁1009的端部之间的距离,使得第二延伸部分1127可以设置在第一突出壁1009的端部之间。
[0206]
如上所述,通过在旋转支架1120的两侧上包括凹部1128,旋转支架1120可以设置成在光轴方向上基本上占据最小空间,并且由于旋转支架1120可以设置在与第一突出壁1009相同的位置上,或者可以设置成在光轴(z轴)方向上邻近第一突出壁1009,可以获得其中可以充分延长变焦驱动器的长度的空间。
[0207]
引导槽1132和1134可以设置在旋转板1130的前表面和后表面上,使得第一滚珠构件1131和第二滚珠构件1133可以插入引导槽,并且引导槽1132和1134可以包括第一引导槽1132和第二引导槽1134,第一滚珠构件1131部分地插入第一引导槽1132中,第二滚珠构件1133部分地插入第二引导槽1134中。
[0208]
此外,壳体1010可以包括第三引导槽1021,第一滚珠构件1131部分地插入其中,并且旋转支架1120可以包括第四引导槽1121,第二滚珠构件1133部分地插入其中。
[0209]
上述的第一引导槽1132、第二引导槽1134、第三引导槽1021和第四引导槽1121可以具有半球形或多边形(多面体或多边形棱锥)槽形状,使得第一滚珠构件1131和第二滚珠构件1133可以容易地旋转。
[0210]
当在第一引导槽1132、第二引导槽1134、第三引导槽1021和第四引导槽1121中滚动或滑动时,第一滚珠构件1131和第二滚珠构件1133可用作轴承。
[0211]
如图13和图15所示,第一滚珠构件1131a和第二滚珠构件1133a可以分别安装到旋转板1130的两个表面或壳体1010和旋转支架1120的一个表面。
[0212]
第一驱动器1140可产生驱动力,使得旋转支架1120可相对于两个轴旋转。
[0213]
例如,第一驱动器1140可以包括多个磁体1141a、1143a、1145a和1147a以及布置成与多个磁体1141a、1143a、1145a和1147a相对的多个线圈1141b、1143b、1145b和1147b。
[0214]
多个磁体1141a、1143a、1145a和1147a可以分别设置在旋转支架1120的两个侧表面上,即平行于yz平面的表面上。如上所述,由于多个磁体1141a、1143a、1145a和1147a以及多个线圈1141b、1143b、1145b和1147b可以设置在旋转支架1120的侧表面上及其相对的表面上,并且可以不设置在壳体1010的底部或上表面侧上,因此相机模块1000的总厚度(沿y轴方向的长度)可以减小,此外,尽管移动设备1的厚度较薄,也可以容易地安装相机模块1000。
[0215]
此外,包括多个磁体1241a和1243a以及多个线圈1241b和1243b的第二驱动器1240也可以设置在壳体1010的侧表面上,这有助于减小相机模块1000的总厚度(在y轴方向上的
长度)。
[0216]
如图1所示,相机模块1000可以被设置成使得壳体1010的底表面可以沿移动设备1的显示器(屏幕)的方向定向,如示例性实施例中所示。当第一驱动器1140或第二驱动器1240设置在壳体1010的侧表面上时,可以极大地防止在显示器(屏幕)的方向上发生的磁通泄漏,从而更少地影响移动设备1的功能。
[0217]
在多个磁体中,1-1磁体1141a和1143a以及1-2磁体1145a和1147a中的每一个可以平行地设置在旋转支架1120的一侧上。1-1磁体1141a和1143a以及1-2磁体1145a和1147a可以被磁化成使得与线圈相对的表面可以在彼此垂直的方向上具有n极和s极,并且例如,1-1磁体1141a和1143a可以被磁化为沿着光轴(z轴方向)具有n极和s极,并且1-2磁体1145a和1147a可以被磁化为在垂直于光轴的y轴方向上具有n极和s极。
[0218]
当向多个线圈1141b、1143b、1145b和1147b供电时,其上安装有多个磁体1141a、1143a、1145a和1147a的旋转支架1120可以通过多个磁体1141a、1143a、1145a和1147a和多个线圈1141b、1143b、1145b和1147b之间的电磁影响而相对于第一轴(x轴)和第二轴(y轴)旋转。
[0219]
多个线圈1141b、1143b、1145b和1147b可以安装在壳体1010上。例如,多个线圈1141b、1143b、1145b和1147b可以安装在壳体1010上,同时安装在主板1070上。也就是说,多个线圈1141b、1143b、1145b和1147b可以设置在主板1070上,主板1070可以附接到壳体1010的外表面,并且多个线圈1141b、1143b、1145b和1147b可以通过通孔1010-1和1010-2暴露到壳体1010中,并且可以与多个磁体1141a、1143a、1145a和1147a相对。
[0220]
在附图中,主板1070可以以整体形式提供,使得反射模块1100的线圈和透镜模块1200的线圈都可以被安装在其中,但是主板1070可以被配置为分成两个或更多个板,使得反射模块1100的线圈和透镜模块1200的线圈可以分别被安装在其中。
[0221]
如图11a所示,在多个线圈1141b、1143b、1145b和1147b安装在主板1070上的同时,主板1070可以通过使用粘合剂接合而附接到壳体1010的外表面。而且,由于诸如图11a中的部分“a”的结构配置,主板1070可以具有弯曲部分,以通过包括侧板1070a和底板1070b来包围壳体1010的侧表面和底表面,并且对于如上所述的板的弯曲部分,可以在使用粘合剂的接合过程中抬起施加粘合剂的两个弯曲部分。
[0222]
因此,如图11b所示,空间部分s可以设置在主板1070所附接至的、壳体1010的弯曲部分的外表面和主板1070的弯曲部分之间。空间部分s可以通过将主板1070的弯曲部分的曲率半径r配置为小于壳体1010的弯曲部分的外表面的曲率半径r来有意地形成。
[0223]
在示例性实施例中,当旋转支架1120旋转时,可以使用感测并提供旋转支架1120的位置反馈的闭环控制方法。
[0224]
因此,位置传感器1141c、1143c、1145c和1147c可以用于闭环控制。位置传感器1141c、1143c、1145c和1147c可以被配置为霍尔传感器、tmr传感器、磁传感器等。
[0225]
位置传感器1141c、1143c、1145c和1147c可以设置在每个线圈1141b和1143b的外部区域中或者位于每个线圈1141b和1143b的外部区域中,并且可以一起安装在主板1070上,其中,每个线圈1141b和1143b安装在主板1070上。
[0226]
位置传感器1141c、1143c、1145c和1147c可以与1-1磁体1141a和1143a以及1-2磁体1145a和1147a中的一个相互作用,或者与可为驱动磁体的全部1-1磁体1141a和1143a以
及1-2磁体1145a和1147a相互作用,或者可以与单独提供的感测磁体1149a相互作用。
[0227]
主板1070可以包括用于感测诸如用户手抖的摇晃因子的陀螺仪传感器(未示出),并且可以包括用于向多个线圈1141b、1143b、1145b和1147b提供驱动信号的驱动电路设备(驱动器ic,未示出)。
[0228]
当旋转支架1120绕第一轴(x轴)旋转时,旋转板1130可以在设置在第一轴(x轴)上的第一滚珠构件1131上旋转(在这种情况下,旋转支架1120可以不相对于旋转板1130移动)。
[0229]
此外,当旋转支架1120相对于第二轴(y轴)旋转时,旋转支架1120可以在布置在第二轴(y轴)上的第二滚珠构件1133上旋转(在这种情况下,由于旋转板1130不旋转,所以旋转支架1120可以相对于旋转板1130移动)。
[0230]
也就是说,当围绕第一轴(x轴)旋转时,可以应用第一滚珠构件1131,并且当围绕第二轴(y轴)旋转时,可以应用第二滚珠构件1133。
[0231]
这是因为,如附图所示,当绕第一轴(x轴)旋转时,相对于第二轴(y轴)对准的第二滚珠构件1133可以插入引导槽,并且可以不移动,并且当绕第二轴(y轴)旋转时,与第一轴(x轴)对准的第一滚珠构件1131可以插入引导槽,并且可以不移动。
[0232]
示例性实施例中的反射模块1100将基于这样的结构来描述,在该结构中,设置有光路改变构件1110的旋转支架1120可以旋转,同时由设置在一个方向上的滚珠构件1131和1133支撑在壳体1010的一个表面上,但是其示例性实施例不限于此。在示例性实施例中,旋转支架1120,1)可以通过弹簧从壳体悬挂而旋转,2)可以通过铰链型旋转构件安装到壳体以可旋转,3)可以设置到壳体以相对于单个轴枢转地旋转,或者4)可以通过沿着弯曲的滚珠引导件滑动或旋转的滚珠构件由壳体支撑而旋转。
[0233]
(图9和图10)ois、自动聚焦、变焦
[0234]
图9是示出根据示例性实施例的其中反射模块和透镜模块联接到壳体的相机模块的立体图。图10是示出根据另一示例性实施例的其中反射模块和透镜模块联接到壳体的相机模块的立体图。
[0235]-实施例2-1(图9)
[0236]
将参考图9和图10描述示例性实施例中的相机模块1000中的af、变焦和ois功能的实现。
[0237]
其路径可以在反射模块1100中改变的光可以入射到透镜模块1200。通过沿光轴方向(z轴)移动设置在透镜模块1200中的三个透镜镜筒1210、1220和1230,可以在入射光上实现自动聚焦(af)或变焦(zoom)功能。
[0238]
参考图9所示的示例性实施例,例如,后两个透镜镜筒1210和1220可以负责变焦功能,并且前透镜镜筒1230可以负责自动聚焦功能。然而,其示例性实施例不限于此,并且三个透镜镜筒1210、1220和1230可以通过各种组合以分开或重叠的方式负责变焦功能和自动聚焦功能。
[0239]-实施例2-2(图10)
[0240]
除了上述示例性实施例之外,还可以执行各种修改的控制。例如,参考图10所示的示例性实施例,后两个透镜镜筒1210和1220可以以分开或重叠的方式执行变焦功能或自动聚焦功能,即,例如,两个透镜镜筒1210和1220可以组合执行变焦功能,并且最后的透镜镜
筒1210可以执行自动聚焦功能,并且前透镜镜筒1230可以保持固定到壳体1010的状态。
[0241]
也就是说,三个透镜镜筒1210、1220和1230中的一个可以保持固定到壳体1010的状态,并且另外两个透镜镜筒可以以分开或重叠的方式执行变焦功能或自动聚焦功能。在这种情况下,例如,在固定到壳体1010的透镜镜筒1230中,插入在驱动磁体或与其相对的线圈与壳体1010之间的滚珠轴承可以不用于轴承,并且可以用于不同的目的,或者可以不是必需的。
[0242]
此外,在与示例性实施例相关的附图中,前透镜镜筒1230和两个后透镜镜筒1210和1220设置其中的空间可以由第二突出壁1008隔开。然而,其示例性实施例不限于此,并且全部三个透镜镜筒1210、1220和1230可以设置在相同的空间中,或者可以设置在不同的分隔空间中。
[0243]
(图16至图27)透镜模块
[0244]
参照图16至图27中,根据示例性实施例的透镜模块1200可以实现自动聚焦(af)和变焦功能,并且透镜镜筒1210和1220可以由第二驱动器1240驱动。
[0245]
透镜模块1200可以包括两个透镜镜筒,第一透镜镜筒1210和第二透镜镜筒1220,它们被设置成可以在壳体1010的内部空间中沿光轴(z轴)方向移动。两个透镜镜筒1210和1220可以通过第二驱动器1240相对于壳体1010在光轴(z轴)方向上移动。
[0246]
第一透镜镜筒1210和第二透镜镜筒1220可以被配置成基本上在光轴(z轴)方向上移动,以实现自动聚焦(af)或变焦功能。
[0247]
因此,第二驱动器1240可以产生驱动力以在光轴(z轴)方向上移动第一透镜镜筒1210和第二透镜镜筒1220中的每一个。也就是说,第二驱动器1240可以通过在光轴(z轴)方向上分别移动第一透镜镜筒1210和第二透镜镜筒1220来实现自动聚焦(af)或变焦功能。
[0248]
第一透镜镜筒1210和第二透镜镜筒1220可以设置成由壳体1010的底面支撑。例如,第一透镜镜筒1210和第二透镜镜筒1220都可以通过滚珠构件或杆由壳体1010的底表面单独支撑。
[0249]
第一透镜镜筒1210可以设置在壳体1010中,以便可以在光轴(z轴)方向上移动。例如,可以在第一透镜镜筒1210和壳体1010的底面之间设置单个第一杆1215a和单个第三滚珠构件1215b。
[0250]
第一透镜镜筒1210可以在光轴(z轴)方向上在第一杆1215a上移动,第一杆1215a沿光轴(z轴)方向固定到壳体1010的底面的两侧中的一侧,并且第三滚珠构件1215b设置成在壳体1010的底面的两侧中的另一侧上在光轴(z轴)方向上滚动。
[0251]
第一透镜镜筒1210可以在第一杆1215a上滑动,并且可以在第三滚珠构件1215b上滚动。
[0252]
第一杆1215a和第三滚珠构件1215b可以设置在第一引导槽1013a(1-1引导槽)和1013b(1-2引导槽)中,第一引导槽1013a(1-1引导槽)和1013b(1-2引导槽)沿光轴方向设置在壳体的底面的两侧上。
[0253]
第一杆1215a可以由止挡件1060-1061按压和支撑以固定到1-1引导槽1013a,或者可以通过使用粘合剂的接合来固定。第三滚珠构件1215b可以在1-2引导槽1013b中滚动。
[0254]
第一杆1215a和第三滚珠构件1215b可以容纳在第一引导槽1013a和1013b中,并且可以设置在第一透镜镜筒1210和壳体1010之间。
[0255]
第一引导槽1013a和1013b可以在光轴(z轴)方向上伸长。第一引导槽1013a和1013b的横截面可以具有各种形状,例如圆形、v形或多边形。
[0256]
第一杆1215a和第三滚珠构件1215b插入其中的第二引导槽1214a(2-1引导槽)和1214b(2-2引导槽)可以设置在与壳体1010的底部相对的第一透镜镜筒1210的下表面上。第二引导槽1214a和1214b的横截面可以具有各种形状,例如圆形、v形或多边形。
[0257]
在2-1引导槽1214a中,接触突起1215c可以彼此间隔开,并且可以设置在两个位置。与第一杆1215a接触的两个接触突起1215c可以设置在每个位置,并且两个接触突起1215c可以在2-1引导槽1214a中在垂直于光轴方向的方向上彼此间隔开,并且可以在两侧与第一杆1215a接触。
[0258]
由于第一杆1215a仅与接触突起1215c接触,因此可以减小由滑动引起的摩擦力。
[0259]
因此,第一透镜镜筒1210可以具有三位置支撑结构,其通过第一接触位置cs1、第二接触位置cs2和第三接触位置cs3实现,所述第一接触位置cs1与单个第三滚珠构件1215b接触,所述第二接触位置cs2和所述第三接触位置cs3在光轴方向上彼此间隔开,其中,第二接触位置cs2和第三接触位置cs3中的每个都具有与第一杆1215a接触的两个接触突起1215c(参见图25)。
[0260]
这里,第一透镜镜筒1210可以被压向壳体1010的底部,以便通过第三滚珠构件1215b和第一杆1215a保持与壳体1010接触的状态。
[0261]
为此,第三磁性材料1016和第四磁性材料1216可以选择性地设置在壳体1010的底面和与底面相对的第一透镜镜筒1210的下表面上,并且第一透镜镜筒1210可以通过磁性材料之间的吸引力而被压向壳体1010的底面。
[0262]
这里,第三磁性材料1016和第四磁性材料1216可以被配置为牵引轭和牵引磁体,并且例如,第三磁性材料1016和第四磁性材料1216可以被选择性地配置为牵引轭和牵引磁体,或者第三磁性材料1016和第四磁性材料1216可以都被配置为牵引磁体。
[0263]
第三磁性材料1016可以在光轴方向上沿着第一透镜镜筒1210的运动路径设置在壳体1010的底面上,并且第四磁性材料1216可以设置在第一透镜镜筒1210的下方以与第三磁性材料1016相对。考虑到第一透镜镜筒1210的移动路径,第三磁性材料1016可以在光轴方向上充分伸长以连续地与第四磁性材料1216相对。
[0264]
在示例性实施例中,第三磁性材料1016可以附接到壳体1010的外表面,并且可以通过设置在壳体1010的底部中的磁性孔1016a暴露于壳体1010的内部空间。或者,第三磁性材料1016可以附接到壳体1010的内部底部,或者可以插入到底面中。
[0265]
在示例性实施例中,当在光轴方向上移动时,第一透镜镜筒1210可以在任何位置形成稳定的三位置支撑结构。
[0266]
即,如图25至图27所示,第一透镜镜筒1210可以在光轴方向上移动(图25中的中间区域、图26中的最左边区域、以及图27中的最右边区域)。在任何情况下,第一透镜镜筒1210可以允许将第四磁性材料1216的磁力的中心mc4设置在由与第三滚珠构件1215b接触的第一接触位置cs1和与第一杆1215a接触的两个接触位置(第二接触位置cs2和第三接触位置cs3)形成的三角形中。
[0267]
这里,第四磁性材料1216的磁力的中心mc4可以是例如第四磁性材料1216与第三磁性材料1016相对的表面的几何中心,并且在图25中,第四磁性材料1216的几何中心可以
是指第四磁性材料1216的x-z平面上的重心。
[0268]
用于驱动第一透镜镜筒1210的线圈1241b可以设置在壳体1010的两个侧表面中的一个侧表面上,并且在这种情况下,电磁力可以作用在第一透镜镜筒1210的一个侧表面上。因此,为了容易地驱动第一透镜镜筒1210,第三磁性材料1016和第四磁性材料1216可以被设置成从壳体1010的中心朝向一个侧表面(即,驱动线圈1241b被布置在其上的一侧)偏置。
[0269]
为了改善驱动力,第一透镜镜筒1210可以包括延伸部分1219,在该延伸部分1219中,磁体1241a安装在其上的部分可以在光轴方向上朝向第二透镜镜筒1220延伸,以增加磁体1241a的尺寸。
[0270]
此外,为了改善驱动力,第二透镜镜筒1220还可以包括延伸部分1229,在该延伸部分1229中,其上安装有磁体1243a的部分可以沿光轴方向朝向第一透镜镜筒1210延伸,以增大磁体1243a的尺寸。
[0271]
第二透镜镜筒1220可以设置在壳体1010中,以便可以在光轴(z轴)方向上移动。例如,第二透镜镜筒1220可以沿光轴方向平行于第一透镜镜筒1210设置在第一透镜镜筒1210的前面。
[0272]
第二透镜镜筒1220可以设置在壳体1010中,以便可以在光轴(z轴)方向上移动。例如,可以在第二透镜镜筒1220和壳体1010的底面之间设置单个第二杆1225a和单个第四滚珠构件1225b。
[0273]
第二透镜镜筒1220可以通过骑在第二杆1225a上而在光轴方向上移动,第二杆1225a在光轴(z轴)方向上固定到壳体1010的底面的两侧中的另一侧,第四滚珠构件1225b设置成在壳体1010的底面的两侧中的一侧上在光轴(z轴)方向上滚动。
[0274]
也就是说,第二透镜镜筒1220可以在第二杆1225a上滑动,并且可以在第四滚珠构件1225b上滚动。
[0275]
第二杆1225a和第四滚珠构件1225b可以设置在壳体底面两侧的沿光轴方向伸长的第三引导槽1014a(3-1引导槽)和1014b(3-2引导槽)中。
[0276]
第二杆1225a可以由止挡件1060-1062按压和支撑,以便固定到3-1引导槽1014a,或者可以通过使用粘合剂的接合来固定。第四滚珠构件1225b可以在3-2引导槽1014b中滚动。
[0277]
第二杆1225a和第四滚珠构件1225b可以容纳在第三引导槽1014a和1014b中,并且可以设置在第二透镜镜筒1220和壳体1010之间。
[0278]
第三引导槽1014a和1014b可以在光轴(z轴)方向上伸长。第三引导槽1014a和1014b的横截面可以具有各种形状,例如圆形、v形或多边形。
[0279]
第二杆1225a和第四滚珠构件1225b插入其中的第四引导槽1224a(4-1引导槽)和1224b(4-2引导槽)可以设置在与壳体1010的底部相对的第二透镜镜筒1220的下表面上。第四引导槽1224a和1224b的横截面可以具有各种形状,例如圆形、v形或多边形。
[0280]
在4-1引导槽1224a中,在第二杆1225a上滑动的接触突起1225c可以在光轴方向上彼此间隔开,并且可以设置在两个位置。与第二杆1225a接触的两个接触突起1225c可以设置在每个位置,并且两个接触突起1225c可以在4-1引导槽1224a中在垂直于光轴方向的方向上彼此间隔开,并且可以在两侧与第二杆1225a接触。
[0281]
由于第二杆1225a仅与接触突起1225c接触,因此可以减小由滑动运动引起的摩擦
力。
[0282]
因此,第二透镜镜筒1220可以通过与单个第四滚珠构件1225b接触的第四接触位置cs4以及在光轴方向上彼此间隔开并且每个都具有与第二杆1225a接触的两个接触突起1225c的第五接触位置cs5和第六接触位置cs6来形成三位置支撑结构。
[0283]
这里,第二透镜镜筒1220可以被压向壳体1010的底部,以通过第四滚珠构件1225b和第二杆1225a保持与壳体1010接触的状态。
[0284]
为此,第五磁性材料1017和第六磁性材料1226可以选择性地设置在壳体1010的底面和第二透镜镜筒1220的与壳体1010的底面相对的下表面上,并且第二透镜镜筒1220可以通过磁性材料之间的吸引力而压向壳体1010的底面。
[0285]
这里,第五磁性材料1017和第六磁性材料1226可以被配置为牵引轭和牵引磁体,并且例如,第五磁性材料1017和第六磁性材料1226可以选择性地是牵引轭和牵引磁体,或者第五磁性材料1017和第六磁性材料1226都可以是牵引磁体。
[0286]
第五磁性材料1017可以在壳体1010的底面上沿着第二透镜镜筒1220的移动路径在光轴方向上伸长,并且第六磁性材料1226可以设置在第二透镜镜筒1220的底部上。考虑到第二透镜镜筒1220的移动路径,第五磁性材料1017可以在光轴方向上充分伸长以连续地与第六磁性材料1226相对。
[0287]
在示例性实施例中,第五磁性材料1017可以附接到壳体1010的外表面,并且可以通过设置在壳体1010的底部中的磁性孔1017a暴露于壳体1010的内部空间。或者,第五磁性材料1017可以附接到壳体1010的内部底部,或者可以插入底面。
[0288]
设置在壳体1010的底面上,并且沿着第一透镜镜筒1210的移动路径在光轴方向上伸长的第三磁性材料1016和第五磁性材料1017可以单独设置或者可以彼此集成在一起(在附图中,第三磁性材料1016和第五磁性材料1017可以集成在一起,但不限于此)。
[0289]
此外,在示例性实施例中,当在光轴方向上移动时,第二透镜镜筒1220可以在任何位置形成稳定的三位置支撑结构。
[0290]
即,如图25至图27所示,第二透镜镜筒1220可以在光轴方向上移动(图25中的中间区域、图26中的最左边区域、以及图27中的最右边区域)。在任何情况下,第二透镜镜筒1220可以允许第六磁性材料1226的磁力的中心mc6被设置在由与第四滚珠构件1225b接触的第四接触位置cs以及与第二杆1225a接触的两个位置(第五接触位置cs5和第六接触位置cs6)形成的三角形中。
[0291]
这里,第六磁性材料1226的磁力的中心可以是例如第六磁性材料1226与第五磁性材料1017相对的表面的几何中心,并且在图25中,第六磁性材料1226的几何中心可以指第六磁性材料1226的x-z平面上的重心。
[0292]
用于驱动第二透镜镜筒1220的线圈1243b可以设置在壳体1010的两个侧表面中的一个侧表面上,并且在这种情况下,电磁力可以作用在第二透镜镜筒1220的一个侧表面上。因此,为了容易地驱动第二透镜镜筒1220,第五磁性材料1017和第六磁性材料1226可以从壳体1010的中心邻近一个侧表面设置,即邻近设置驱动线圈1243b的一侧设置。
[0293]
为了提高驱动力,第二透镜镜筒1220可以具有延伸部分1229,其上安装有磁体1243a的部分可以沿光轴方向朝向第一透镜镜筒1210延伸,以增大磁体1243a的尺寸。
[0294]
如上所述,第一透镜镜筒1210和第二透镜镜筒1220可以骑在不同的滚珠构件和杆
上沿光轴方向移动,使得第一透镜镜筒1210和第二透镜镜筒1220可以在光轴方向上移动长距离,以实现长行程,并且支撑部分可以是延长的,用于稳定地驱动每个透镜镜筒。
[0295]
因此,如图17所示,用于第一透镜镜筒1210的1-1引导槽1013a和1-2引导槽1013b,以及用于第二透镜镜筒1220的3-1引导槽1014a和3-2引导槽1014b可以并排设置在壳体1010的底部,并且第一杆1215a和第二杆1225a可以分别设置在1-1引导槽1013a和3-1引导槽1014a中。
[0296]
示例性实施例中的相机模块1000可以被配置用于变焦驱动,并且第一透镜镜筒1210和第二透镜镜筒1220可以在光轴方向上移动长距离,并且因此,第一杆1215a、1-2引导槽1013b、第二杆1225a和2-2引导槽1014b可以在垂直于光轴的方向上基本上重叠。
[0297]
壳体1010可以包括设置在内表面上的槽形集尘器dt,以收集内部产生的或从外部引入的杂质,并且集尘器dt可以填充有粘性粘合剂,以容易地收集杂质。
[0298]
壳体1010可以包括分别用于驱动反射模块1100和透镜模块1200的第一驱动器1140和第二驱动器1240。上面已经详细描述了第一驱动器1140,并且第二驱动器1240可以包括多个磁体1241a和1243a以及多个线圈1241b和1243b。
[0299]
例如,第二驱动器1240可以包括多个磁体1241a和1243a以及布置成与多个磁体1241a和1243a相对的多个线圈1241b和1243b。
[0300]
示例性实施例中的透镜镜筒1210和1220可能需要在光轴方向上移动长距离以实现变焦相机。因此,磁体1241a和1243a中的每一个可以以两个或更多个磁极磁化,以在光轴方向上顺序地具有至少n和s磁极,并且线圈1241b和1243b中的每一个中的两个或更多个可以被包括。
[0301]
当对多个线圈1241b和1243b供电时,其中分别设置有多个磁体1241a和1243a的第一透镜镜筒1210和第二透镜镜筒1220可以通过多个磁体1241a和1243a与多个线圈1241b和1243b之间的电磁影响而沿光轴(z轴)方向单独移动。因此,可以实现变焦或自动聚焦控制。
[0302]
多个磁体1241a和1243a可以分别单独地设置在第一透镜镜筒1210和第二透镜镜筒1220中。例如,第一磁体1241a可以安装在第一透镜镜筒1210的侧表面上,第二磁体1243a可以安装在第二透镜镜筒1220的侧表面上。
[0303]
多个线圈1241b和1243b可以安装在壳体1010上,以分别与多个磁体1241a和1243a相对。
[0304]
这里,由于设置在第一透镜镜筒1210和第二透镜镜筒1220中的多个磁体1241a和1243a分别单独地设置在两侧上,所以多个线圈1241b和1243b也可以单独地设置在壳体1010的两侧壁上以与其相对。
[0305]
例如,可以将多个线圈1241b和1243b安装在主板1070上,并且可以将主板1070附接到壳体1010的外表面上,使得可以通过通孔1010-3和1010-4将多个线圈1241b和1243b暴露到壳体1010中。
[0306]
在示例性实施例中,当第一透镜镜筒1210和第二透镜镜筒1220移动时,可以使用感测和提供第一透镜镜筒1210和第二透镜镜筒1220的位置反馈的闭环控制方法。因此,位置传感器1241c和1243c对于闭环控制可能是必需的。位置传感器1241c和1243c可以是霍尔传感器、tmr(隧道磁阻效应)角度传感器、通用tmr传感器等。
[0307]
位置传感器1241c和1243c可以设置在线圈1241b和1243b的内部或外部,并且位置
传感器1241c和1243c也可以一起安装在主板1070上,其中,线圈1241b和1243b安装在主板1070上。由于第一透镜镜筒1210和第二透镜镜筒1220的移动距离可以相对较长,所以可以在光轴方向上布置多个位置传感器1241c和1243c并使它们彼此间隔开。
[0308]
(图18a至图24b)透镜镜筒壳体支撑结构
[0309]-实施例3-1(图1)18a)
[0310]
图18a至图24b是示出根据各种示例性实施例的结构的立体图,在该结构中,联接到支架的透镜镜筒由壳体支撑。而为了清楚和简明起见,在图18a至图24a中示出了第一透镜镜筒1210或第二透镜镜筒1220,应当理解,第一透镜镜筒1210和第二透镜镜筒1220中的另一个可以是所示的第一透镜镜筒1210或第二透镜镜筒1220的基本镜像。
[0311]
参照图18a,示例性实施例中的第一透镜镜筒1210或第二透镜镜筒1220可以由第一杆1215a或第二杆1225a以及滚珠构件1215b或1225b引导,并且可以在壳体1010中沿光轴方向移动。
[0312]
杆1215a或1225a可以是固定到壳体1010的固定构件,并且滚珠构件1215b和1225b可以配置成滚动。因此,第一透镜镜筒1210或第二透镜镜筒1220的一侧可以形成在杆1215a或1225a上移动的滑动运动(滑动摩擦),并且两侧中的另一侧可以形成在滚珠构件1215b和1225b上移动的滚动运动(滚动摩擦)。
[0313]
也就是说,由于示例性实施例中的第一透镜镜筒1210或第二透镜镜筒1220的一侧在第一杆1215a或第二杆1225a上滑动,所以第一杆1215a或第二杆1225a可以在其表面上涂覆有涂层材料以减小摩擦和噪音。
[0314]
涂层材料可以是与固体润滑剂混合的树脂材料粘合剂,例如聚酰胺酰亚胺或环氧树脂,并且在一些情况下,各种添加剂除了润滑和提供滑动效果之外还提供诸如耐磨性和防锈性的功能。
[0315]
与粘合剂混合的固体润滑剂可以是铁氟龙(teflon)、钼(mos2)、聚四氟乙烯或氟树脂(ptfe)、石墨等中的至少一种。
[0316]-实施例3-2(图18b)
[0317]
参照图18b,示例性实施例中的第一透镜镜筒1210或第二透镜镜筒1220还可以包括其中设置有透镜的透镜镜筒1210b和包围透镜镜筒的支架1210h。包括在参照图16和图17描述的第一透镜镜筒1210或第二透镜镜筒1220中的部件可以设置在支架1210h中,并且支架1210h可以通过杆1215a或1225a以及滚珠构件1215b或1225b由壳体1010支撑,并且其运动可以被引导。
[0318]
由于透镜镜筒1210b插入支架1210h的上部和下部可以配置成具有薄厚度以减小厚度,因此可以在支架1210h中设置由金属形成的加强构件1210m,以包围透镜镜筒1210b,从而可以增加刚性。
[0319]
加强构件1210m可以被分开或集成以在上部和下部围绕透镜镜筒1210b。加强构件1210m可以使用粘合剂联接到透镜镜筒1210b,或者可以通过插入注射而集成在一起。
[0320]
在示例性实施例中,透镜镜筒1210b和支架1210h可以在第一透镜镜筒1210或第二透镜镜筒1220中彼此集成,但是示例性实施例中的第一透镜镜筒1210或第二透镜镜筒1220可以包括如参照图18b所述的透镜镜筒1210b和支架1210h,透镜镜筒1210b中设置有透镜,支架1210h包围透镜镜筒1210b。
[0321]-实施例3-3(图19a至图19b)
[0322]
参照图19a和图19b,示例性实施例中的第一透镜镜筒1210或第二透镜镜筒1220可以由杆1215a或1225a以及滚珠构件1215b或1225b引导,并且可以在壳体1010中沿光轴方向移动。
[0323]
设置在两个位置的第一接触突起1215c或第二接触突起1225c可以分别设置在第一透镜镜筒1210或第二透镜镜筒1220的2-1引导槽1214a或4-1引导槽1224a中。
[0324]
设置在单个位置的接触突起1215c和1225c中的每一个可以包括朝向杆1215a和1225a突出的两个接触点,并且可以配置成突出到引导槽1214a和1224a中的球形表面。
[0325]
杆1215a和1225a可以仅与接触突起1215c和1225c接触,而不是与整个引导槽1214a和1224a接触。
[0326]
2-1引导槽1214a或4-1引导槽1224a可配置为成角的v形槽(图19a)或圆形的u形槽(图19b)。
[0327]-实施例3-4(图20a至图20b)
[0328]
参照图20a和图20b,设置在所述位置中的接触突起1215c和1225c中的每一个都可以具有v形突起(图20a)或多边形突起(图20b),其中接触突起1215c和1225c可以设置在引导槽1214a和1224a中并与它们集成在一起,或者另一个构件可以附接到引导槽1214a和1224a。
[0329]
杆1215a和1225a可以不与引导槽1214a和1224a接触,并且可以仅与突出到引导槽1214a和1224a中的接触突起1215c和1225c接触。
[0330]
2-1引导槽1214a或4-1引导槽1224a可以是成角的v形槽(图20a)或圆形的u形槽(图20b)。
[0331]-实施例3-5(图21)
[0332]
参照图21,设置在所述位置的接触突起1215c和1225c中的每一个可以不直接设置在引导槽1214a、1224a中,并且可以设置在形成引导槽1214a和1224a的一部分的引导块gb中。也就是说,透镜镜筒1210和1220可以包括附接到引导槽1214a和1224a两侧的引导块gb。
[0333]
参照图19和图20所述的接触突起1215c和1225c可以设置在引导块gb上。两个引导块gb可以设置在每个引导槽1214a和1224a的两侧。
[0334]-实施例3-6(图22)
[0335]
参照图22,参照图19描述的球形接触突起1215c和1225c可设置成使得球形滚珠构件1215e和1225e可嵌入引导槽1214a和1224a中。为此,滚珠构件1215e和1225e插入其中的固定槽1214d和1224d可以设置在引导槽1214a和1224a中。滚珠构件1215e和1225e可以通过使用粘合剂接合而固定到固定槽1214d和1224d。
[0336]-实施例3-7(图23)
[0337]
参照图23,示例性实施例中的第一透镜镜筒1210或第二透镜镜筒1220可以不由杆(滑动)和滚珠构件(滚动)引导,并且可以由固定到透镜镜筒的两个滚珠构件1215d和1225d(滑动)引导,而不是由杆1215a和1225a以及滚动滚珠构件1215b和1225b引导。
[0338]
因此,在图23的示例性实施例中,杆1215a、1225a和接触突起1215c、1225c可以不是必需的,并且两个固定滚珠构件1215d和1225d可以分别固定到第一透镜镜筒1210或第二透镜镜筒1220,而不是杆。
[0339]
两个固定滚珠构件1215d和1225d可以沿着壳体1010的第一引导槽1013a或第三引导槽1014a滑动。
[0340]-实施例3-8(图24a至图24b)
[0341]
参照图24a和图24b,设置在壳体1010中的第一引导槽1013a或第三引导槽1014a可以由两个引导杆gs实现。也就是说,引导杆gs可以沿光轴方向并排设置,并且固定到第一透镜镜筒1210或第二透镜镜筒1220中的每一个上的两个固定滚珠构件1215d和1225d可以使用形成在两个引导杆gs上和之间的槽作为第一引导槽1013a或第三引导槽1014a滑动。
[0342]
(图28至图38)阻尼器和止挡件
[0343]
参照图28至图38,将根据示例性实施例来描述旋转支架的阻尼器以及透镜镜筒的止挡件。
[0344]-实施例4-1(图28至图31b)
[0345]
参照图28,根据示例性实施例的反射模块1100和透镜模块1200可以设置在由第一突出壁1009分隔的单个空间中。
[0346]
反射模块1100可能通过由于旋转以实现光学图像稳定而引起的外部冲击或其它冲击而与壳体1010相互接触,并且在这种情况下,由于断裂或过度的行程而不可能精确地控制光轴方向上的位置。
[0347]
因此,在示例性实施例中的相机模块的壳体1010中,如上所述,可以包括插入到设置在第一突出壁1009的上部中的插入槽1019中的阻尼器1050。
[0348]
此外,在示例性实施例中,可以设置止挡件1060以控制第一透镜镜筒1210和第二透镜镜筒1220的移动。止挡件1060可以包括用于限制第一透镜镜筒1210的移动距离的第一止挡件1061和用于限制第二透镜镜筒1220的移动距离的第二止挡件1062。
[0349]
一对第一止挡件1061可设置在第一杆1215a的两端以限制第一透镜镜筒1210的移动距离,并且一对第二止挡件1062可设置在第二杆1225a的两端以限制第二透镜镜筒1220的移动距离。
[0350]
因此,在壳体1010中,第一止挡件1061和第二止挡件1062被钩住并固定到其上的第一钩部1010d和第二钩部1010e可以分别设置在第一杆1215a和第二杆1225a中的每一个的两端的上部。
[0351]
第一止挡件1061和第二止挡件1062可以分别在与第一透镜镜筒1210和第二透镜镜筒1220相对的部分中包括阻尼材料1061c和1062c,并且当与第一透镜镜筒1210和第二透镜镜筒1220接触时可以吸收冲击。
[0352]-实施例4-2(图30)
[0353]
第一透镜镜筒1210和第二透镜镜筒1220可能与盖1030碰撞,同时由于振动或外部冲击而在垂直于光轴方向的方向上无意地移动。
[0354]
因此,参照图30,可在与盖1030相对的第一透镜镜筒1210和第二透镜镜筒1220的上表面上设置多个第三止挡件1211和第四止挡件1221,并且止挡件可吸收冲击或可防止与整体接触,从而可防止第一透镜镜筒1210和第二透镜镜筒1220的一部分断裂或接触的问题。
[0355]
参照图31b,止挡件1061和1062可以包括框架1061a和1062a、在垂直于光轴方向的方向上延伸的延伸部分1061b和1062b、以及设置在延伸部分1061b和1062b中的阻尼材料
1061c和1062c。
[0356]
阻尼材料1061c和1062c可以插入到设置在延伸部分1061b和1062b中的孔中,并且可以从延伸部分1061b和1062b的两个表面突出,或者可以通过使用粘合剂接合而固定到延伸部分1061b和1062b的两个表面。
[0357]
此外,框架1061a和1062a可以设置成钩状,并且可以钩在壳体1010的一端或突出壁的上部上,并且延伸部分1061b和1062b以及阻尼材料1061c和1062c可以插入透镜镜筒1210和1220的一侧与壳体1010的侧表面或突出壁之间的区域中。
[0358]
框架1061a和1062a通过被钩住可以被按压和插入或者可以滑动并联接到壳体1010的侧壁或突出壁上,并且可以通过使用粘合剂接合而进一步固定。
[0359]-实施例4-3(图32至图35)
[0360]
参照图32至图35中,止挡件1061和1062可设置成按压杆1215a和1225a的两端。
[0361]
也就是说,止挡件1061和1062可以设置在杆1215a和1225a的两端,并且可以限制透镜镜筒1210和1220的移动距离,或者可以吸收冲击,可以沿竖直方向插入,并且可以通过压配合和/或使用粘合剂的接合来固定,并且可以使用固定力将安装在壳体底部的杆1215a和1225a紧固。
[0362]
因此,止挡件1061和1062的端部,即延伸部分1061b和1062b的端部可包括支撑部分,该支撑部分可被部分地切除以容易地与杆1215a和1225a接触,并且支撑部分可包括与杆1215a和1225a的上部接触的上支撑部分1061d和与杆1215a和1225a的侧表面相对的侧支撑部分1061e(图31b)。
[0363]
此外,杆1215a和1225a可以通过使用粘合剂接合而固定到壳体1010的引导槽1013a和1014a,并且多个部分可以通过引导槽1013a和1014a由粘合剂b沿着杆1215a和1225a的圆周固定(图34),或者粘合剂可以沿着杆1215a和1225a的圆周连续地施加,并且可以固定到引导槽1013a和1014a(图35)。
[0364]-实施例4-4(图36)
[0365]
此外,如图36所示,止挡件1061和1062的与杆1215a和1225a接触的端部可以通过相互焊接相互连接,并且杆1215a和1225a的上部和上支撑部分1061d可以相互焊接(w)。
[0366]-实施例4-5(图37至图38)
[0367]
参照图37和图38,杆1215a和1225a可以通过使用粘合剂(b)接合而固定到壳体1010的引导槽1013a和1014a。例如,杆1215a和1225a的两端可以通过如图37所示的粘合剂b固定到引导槽1013a和1014a,或者杆1215a和1225a可以以相当长的长度固定到引导槽1013a和1014a,所述长度包括杆1215a和1225a在光轴方向上的两端,并且杆1215a和1225a可以包括在中间没有涂覆的部分nb。
[0368]
(图39至图40)固定透镜位置的自动设置。
[0369]
参照图39和图40,将描述示例性实施例中的固定到相机模块1000的透镜镜筒的固定位置。
[0370]
第三透镜镜筒1230可以固定到壳体1010。例如,第三透镜镜筒1230可以沿着平行于光轴方向的方向设置在第二透镜镜筒1220的前面。
[0371]
由于第三透镜镜筒1230被固定到壳体1010中的预定位置,所以将第三透镜镜筒1230设置在精确位置可能是重要的。设置在相机模块中的全部透镜可能需要在光轴方向上
精确对准。因此,可能需要精确地确定在光轴方向上的位置和在垂直于透镜镜筒的光轴方向的方向上的位置。
[0372]-实施例5-1(图39)
[0373]
参照图39,将描述确定第三透镜镜筒1230在光轴方向上的位置的结构。
[0374]
壳体1010的内部空间可以在光轴方向上被分成前第一突出壁1009和后第二突出壁1008,并且在第一突出壁1009和第二突出壁1008之间可以形成插入第三透镜镜筒1230的空间。
[0375]
在第三透镜镜筒1230中,第一定位突起1236和第二定位突起1237可以沿光轴方向设置在第一突出壁1009和第三透镜镜筒1230的相对表面中的至少一个上,以及沿光轴方向设置在第二突出壁1008和第三透镜镜筒1230的相对表面中的至少一个上。
[0376]
因此,通过显著减小接触面积或通过点接触结构,可以解决当使用表面接触时难以确定位置的问题。
[0377]-实施例5-2(图40)
[0378]
此外,参考图40,将描述在垂直于光轴方向的方向(x轴方向和y轴方向)上确定第三透镜镜筒1230的位置的结构。
[0379]
在第一突出壁1009和第二突出壁1008之间可以形成插入第三透镜镜筒1230的空间,并且在空间底部的两侧可以设置向上突出的第三定位突起1238。因此,可以确定第三透镜镜筒1230在厚度方向(y轴方向)上的位置。
[0380]
此外,第三定位突起1238可以包括沿厚度方向(y轴方向)引入的定位凹槽1239b,并且插入到定位凹槽1239b中的第四定位突起1239a可以设置在第三透镜镜筒1230下方。因此,可以另外确定光轴方向和宽度方向(x轴方向)上的位置。
[0381]
(图41至图43b)传感器移位模块
[0382]
参照图41至图43b,将根据另一示例性实施例描述具有传感器移位结构的相机模块。
[0383]
如以上参考图9和图10所述,示例性实施例中的相机模块1000中的ois功能(光学图像稳定功能)可以由反射模块1100来实现。
[0384]-实施例6-1(图41)
[0385]
在另一示例性实施例中的相机模块1003中,如图41所示,反射模块1100的光路改变构件1110可以仅改变光路,同时保持固定状态,并且图像传感器1310可以在垂直于光轴的两个方向上移动,从而实现ois功能。
[0386]
上述结构例如,可以根据如图42a和图42b所示的滚珠构件的滚动运动来实现,或者可以通过如图43a和43b所示的弹簧支撑结构来实现。
[0387]-实施例6-2(图42a和图42b)
[0388]
参照图42a和图42b,将描述图像传感器1310的结构,其可以在由滚珠构件支撑的同时在垂直于光轴方向的方向上滚动。尽管在附图中未示出,但是图像传感器1310可以连接到柔性板,并且可以连接到用于控制和供电的外部实体。
[0389]
即,示例性实施例中的光学图像稳定模块1500可以是设置在图像传感器模块1300中的传感器移位模块。
[0390]
光学图像稳定模块1500可以包括壳体1510和沿光轴方向(z轴方向)依次设置在壳
体1510中的第一框架1530和第二框架1550,并且图像传感器1310可以设置在第二框架1550中。
[0391]
第一框架1530可以在垂直于光轴方向的第一方向(y轴方向)上移动,第二框架1550可以在垂直于光轴方向和第一方向(y轴方向)的第二方向(x轴方向)上移动。因此,设置在第二框架1550中的图像传感器1310可以在第一方向(y轴方向)和第二方向(x轴方向)上移动。此外,光学图像稳定模块1500可以包括滤波器1340,例如红外滤波器1340。
[0392]
第一框架1530可以设置在壳体1510上,其中第五滚珠构件1531插置在第一框架1530和壳体1510之间,第二框架1550可以设置在第一框架1530上,其中第六滚珠构件1533插置在第二框架1550和第一框架1530之间。
[0393]
第一框架1530和壳体1510的相对表面中的至少一个可以包括第五引导槽1532,并且第五滚珠构件1531可以插入到第五引导槽1532中,并且可以通过滚动或摩擦(滑动)作为轴承。
[0394]
第五引导槽1532可以在垂直于光轴方向的第一方向上(y轴方向)伸长,并且可以通过在第一方向上的滚动或摩擦(滑动)来移动。
[0395]
至少三个第五滚珠构件1531可以设置在第一框架1530和壳体1510之间。
[0396]
第二框架1550和第一框架1530的相对表面中的至少一个可以包括第六引导槽1534,并且第六滚珠构件1533可以插入第六引导槽1534中,并且可以通过滚动或摩擦(滑动)用作轴承。第六引导槽1534可以在垂直于光轴方向和第一方向(y轴方向)的第二方向(x轴方向)上伸长,并且可以在第二方向上滚动或摩擦移动(滑动)。
[0397]
至少三个第六滚珠构件1533可以设置在第二框架1550和第一框架1530之间。
[0398]
壳体1510可以被配置为形成图像传感器模块1300的外部形状的图像传感器模块1300的壳体或分别附接的结构。
[0399]
此外,壳体1510和第二框架1550可以具有第三驱动器1570,该第三驱动器1570提供驱动力以在第一方向和第二方向上分别移动第一框架1530和第二框架1550。
[0400]
第三驱动器1570可以包括设置在壳体1510中的线圈1571b和1573b以及设置在第二框架1550中的磁体1571a和1573a。
[0401]
线圈1571b和1573b可以设置在壳体1510中同时安装在板上,并且磁体1571a和1573a可以设置在第一框架1530中以与线圈1571b和1573b相对。
[0402]
尽管未示出,磁体1571a和1573a可以分别设置在第一框架1530和第二框架1550中,以分别与线圈1571b和1573b相对。
[0403]
在附图(图42b)中,如在磁体1571a和1573a以及线圈1571b和1573b中,同时为单个磁体和单个线圈提供两个附图标记,这可以指示该部件是两个部件中的任一个。在实际的结构中,部件可以分别设置在壳体1510的不同表面上。例如,考虑到相机模块的厚度的减小,可以将部件设置在与壳体1010的两侧相对应的位置。
[0404]
此外,示例性实施例中的光学图像稳定模块1500可以使用通过感测第一框架1530和第二框架1550的位置来连续控制的闭环控制方法,并且因此,壳体1510可以包括用于感测第二框架1550的位置的位置传感器1571c和1573c,并且位置传感器可以设置在可以感测磁体1571a和1573a的磁场变化的位置中。位置传感器1571c和1573c可以是霍尔传感器、通用tmr传感器、tmr角度传感器、磁传感器等。
[0405]-实施例6-3(图43a和图43b)
[0406]
参照图43a和图43b,将描述图像传感器1310的结构,其可以在由弹性构件1630支撑的同时在垂直于光轴方向的方向上滚动。尽管在附图中未示出,但是图像传感器1310可以连接到柔性板并且可以连接到用于控制和供电的外部实体。
[0407]
也就是说,示例性实施例中的光学图像稳定模块1600可以被配置为设置在图像传感器模块1300中的传感器移位模块。
[0408]
光学图像稳定模块1600可以包括壳体1610和在光轴方向(z轴方向)上与壳体1610重叠的框架1650,并且图像传感器1310可以设置在框架1650上。
[0409]
框架1650可以沿垂直于光轴方向的第一方向(x轴方向)和沿垂直于光轴方向和第一方向(x轴方向)的第二方向(y轴方向)移动。因此,设置在框架1650中的图像传感器1310可以在第一方向(x轴方向)和第二方向(y轴方向)上移动。此外,光学图像稳定模块1600可以包括滤波器1340,诸如红外滤波器1340。
[0410]
框架1650可以设置成由壳体1610中的弹性构件1630支撑。弹性构件1630可配置成具有弹性的线、绳、螺旋弹簧、板簧等。
[0411]
四个弹性构件1630可以设置在框架1650和壳体1610之间。在附图中,仅示出了其中弹性构件1630在光轴方向上竖立的结构,但是弹性构件1630可以在垂直于光轴方向的方向上伸长,或者可以具有其中至少四个弹性构件彼此连接的结构。
[0412]
壳体1610可以被配置为形成图像传感器模块1300外部形状的图像传感器模块1300的壳体或分别附接的结构。
[0413]
此外,壳体1610和框架1650可以包括第四驱动器1670,其提供驱动力以在第一方向和第二方向上移动框架1650。
[0414]
第四驱动器1670可以包括设置在壳体1610中的线圈1671b和1673b以及设置在框架1650中的磁体1671a和1673a。
[0415]
线圈1671b和1673b可以设置在壳体1610中同时安装在板上,并且磁体1671a和1673a可以设置在框架1650中以与线圈1671b和1673b相对。
[0416]
在附图(图43b)中,为了方便起见,如在磁体1671a和1673a以及线圈1671b和1673b中,同时为单个磁体和单个线圈提供了两个附图标记,这可以指示该部件是两个部件中的任一个。在实际的结构中,部件可以分别设置在壳体1610的不同表面上。例如,考虑到相机模块的厚度的减小,可以将部件设置在与壳体1010的两侧相对应的位置。
[0417]
此外,示例性实施例中的光学图像稳定模块1600可以使用通过感测框架1650的位置来连续控制的闭环控制方法,并且因此,壳体1610可以包括用于感测第二框架1650的位置的位置传感器1671c和1673c,并且位置传感器可以设置在可以感测磁体1671a和1673a的磁场变化的位置中。位置传感器1671c和1673c可以是霍尔传感器、通用tmr传感器、tmr角度传感器、磁传感器等。
[0418]
(图44)另一种类型的致动器
[0419]
示例性实施例中的用于产生在相机模块1000的透镜模块1200中沿光轴方向移动透镜镜筒的力的驱动致动器可以被实现为线性致动器、压电致动器、形状记忆合金致动器、步进电机、电磁致动器、移动线圈和移动磁体。尽管没有提供每个致动器的详细说明,但是可以应用应用于通用相机模块的各种结构的致动器。在下文中,将参照图44作为示例来描
述可应用于示例性实施例的压电致动器的结构。
[0420]
示例性实施例中的相机模块1000可以采用压电致动器作为驱动致动器。除了对驱动致动器的修改,在其它附图中所示的结构也可以被应用。
[0421]-实施例7-1(图44)
[0422]
参照图44,在示例性实施例中的相机模块1000中,在透镜模块1200中使用的致动器可以被实现为压电致动器,而不是使用线圈和磁体的音圈马达。
[0423]
为了实现压电致动器,可以提供具有杆状并且在光轴(z轴)方向上伸长的推动器1270以及推动器1270插入其中并穿过其中的压电装置1280。
[0424]
在光轴(z轴)方向上延伸和伸长的棒状推动器1270可以设置在透镜镜筒1210和1220上,并且推动器1270插入其中并穿过的压电装置1280可以固定到壳体1010上。压电装置1280可产生沿光轴方向推动或拉动推动器1270的力,因此,其中安装有推动器1270的透镜镜筒1210和1220可沿光轴方向移动。
[0425]
然而,在上述结构中,由于杆状推动器1270在光轴方向上移动,因此在光轴方向上可能需要相对较长的空间。
[0426]
因此,在示例性实施例中,在光轴(z轴)方向上伸长的棒状推动器1270可以设置在壳体1010中,并且推动器1270插入其中并穿透的压电装置1280可以设置在透镜镜筒1210和1220中。压电装置1280可以产生沿光轴方向推动或拉动推动器1270的力,因此,安装有压电装置1280的透镜镜筒1210和1220可以沿光轴方向移动。
[0427]
(图45至图58)位置传感器(霍尔传感器、tmr传感器)
[0428]
图45是示出根据示例性实施例的设置在透镜镜筒中的磁体和位置传感器之间的位置关系的图。
[0429]-实施例8-1(图45)
[0430]
参照图45,示例性实施例中的相机模块1000可以使用位置传感器1241c和1243c来感测透镜镜筒1210和1220在光轴方向上的位置。
[0431]
位置传感器1241c和1243c可以安装在可以感测设置在透镜镜筒1210和1220中的磁体的磁场变化的位置,并且霍尔传感器、通用tmr传感器、tmr角度传感器等可以应用到位置传感器。
[0432]
在如示例性实施例中那样在光轴方向上具有相对长的移动距离以实现具有改进的性能的变焦功能的透镜镜筒1210和1220中,对于单个位置传感器,精度可能不够,因此,在示例性实施例中,可以使用两个或更多个位置传感器。
[0433]-实施例8-2(图46至图48)
[0434]
图46是示出根据示例性实施例的位置传感器(霍尔传感器)和磁体之间的位置关系的图。图47是示出根据透镜镜筒在图47所示的位置关系中的移动的两个位置传感器(霍尔传感器)的感测值的曲线图。图48是示出使用图47所示的感测值作为反正切的值的曲线图。
[0435]
参照图46,沿光轴方向设置的至少四个线圈1241b和1243b可以设置在壳体1010中,并且沿光轴方向移动的透镜镜筒1210和1220可以包括以三个磁极磁化以与线圈1241b和1243b相对的磁体1241a和1243a。这里,磁体1241a和1243a可以配置成驱动磁体,该驱动磁体向透镜镜筒1210和1220提供驱动力。
[0436]
在壳体1010中,两个位置传感器1241c和1243c(在附图中标记为h1和h2)可以分别设置在磁体1241a和1243a周围的、其中磁体1241a和1243a的磁场发生变化的位置。
[0437]
当磁体1241a和1243a在光轴方向(z轴方向)上移动时,位置传感器h1和h2,诸如霍尔传感器或通用tmr传感器,可以根据磁体1241a和1243a的位置而具有不同的感测值(单位,例如t,特斯拉),并且在示例性实施例中,第一位置传感器h1和第二位置传感器h2可以根据磁体1241a和1243a的移动来感测正弦(sin)或余弦(cos)曲线。
[0438]
如图47所示,示例性实施例中的第一位置传感器h1和第二位置传感器h2可以设置在壳体1010中,使得根据磁体1241a和1243a的移动感测的值可以在它们之间具有90度的相位差。
[0439]
位置传感器的感测值之间的差值可以根据磁体1241a和1243a的磁化间隔、宽度等以及位置传感器的安装位置而变化,因此,位置传感器h1和h2可以安装在壳体1010中,使得在磁体1241a和1243a安装在透镜镜筒1210和1220中之后,感测值之间可以具有90度的相位差。
[0440]
当在由图47所示的、第一位置传感器h1和第二位置传感器h2的感测值所指示的正弦或余弦曲线值中获得h1和h2的反正切值(即反正切(h2/h1)值)时,可以导出图48所示的线性线。即,当使用示例性实施例中的两个第一位置传感器h1和第二位置传感器h2的感测值的反正切值时,反正切值可以在其中反正切值根据透镜镜筒1210和1220的位置逐渐增加的曲线图中表示,更具体地,反正切值可以在其中反正切值以基本上恒定的斜率不断增加或减小的曲线图中表示。
[0441]
在这种情况下,由于反正切值可以根据透镜镜筒在光轴方向上的运动而(恒定地)增加或减小,因此可以容易且精确地感测透镜镜筒1210和1220的位置。
[0442]-实施例8-3(图49至图51)
[0443]
图49是示出根据示例性实施例的位置传感器(tmr角度传感器)和磁体之间的位置关系的图。图50是示出图49所示的tmr角度传感器的定位的图。图51是示出了两个位置传感器(tmr角度传感器)根据透镜镜筒在图49所示的位置关系中的移动的感测值以及感测值的反正切的曲线图。
[0444]
参照图49,壳体1010可以包括沿光轴方向布置的四个线圈1241b和1243b,并且沿光轴方向移动的透镜镜筒1210和1220可以具有磁化到3磁极的磁体1241a和1243a,以与线圈1241b和1243b相对。这里,磁体1241a和1243a可以配置成驱动磁体,该驱动磁体向透镜镜筒1210和1220提供驱动力。
[0445]
在壳体1010中,在图中标记为t1和t2的两个位置传感器1241c和1243c可以分别设置在磁体1241a和1243a周围的、其中可以感测磁体1241a和1243a的磁场变化的位置。
[0446]
当磁体1241a和1243a沿光轴方向(z轴方向)移动时,位置传感器t1和t2,诸如tmr角度传感器,可以具有不同的感测值(单位,例如,度),并且在示例性实施例中,第一位置传感器t1和第二位置传感器t2的感测值可以根据磁体1241a和1243a的移动而具有正弦或余弦曲线形状。tmr角度传感器可以感测从磁体1241a和1243a产生的磁力线的角度(即,感测通过tmr角度传感器的磁力线的角度),并且通常可以用于感测旋转物体的位置,但是在示例性实施例中,tmr角度传感器可以用于感测线性移动的透镜镜筒的位置。
[0447]
tmr角度传感器可以被配置为即使在传感器不与磁体相对时也精确地感测磁体的
移动位置。
[0448]
如图51所示,示例性实施例中的第一位置传感器t1和第二位置传感器t2可以设置在壳体1010中,使得根据磁体1241a和1243a的移动感测的值可以在它们之间具有90度的相位差。
[0449]
因此,如图50所示,当在光轴方向上以三个磁极磁化的磁体中两端的磁极中心之间的距离为“d”时,在光轴方向上两个tmr角度传感器t1和t2之间的距离g可以被确定为d/5或更大以及d/3或更小。或者,参照磁体在光轴方向上的总长度l,在光轴方向上两个tmr角度传感器t1和t2之间的距离g可以被确定为l/7或更大以及l/5或更小。
[0450]
两个tmr角度传感器t1和t2的中心在光轴方向上几乎与磁体的中心一致。例如,在三磁极磁体的情况下,可以设置两个tmr角度传感器t1和t2,以便不偏离设置在中间的磁极。
[0451]
此外,位置传感器的感测值的差值可以根据磁体1241a和1243a的磁化间隔、宽度等以及位置传感器的安装位置而变化,因此,位置传感器t1和t2可以安装在壳体1010中,使得在磁体1241a和1243a安装在透镜镜筒1210和1220中之后,感测值可以具有90度的相位差。
[0452]
当在由图51所示的、第一位置传感器t1和第二位置传感器t2的感测值所指示的正弦或余弦曲线值中获得第一位置传感器t1和第二位置传感器t2的反正切值(即,反正切(t2/t1)的值)时,可以导出图51所示的线性线。即,当使用示例性实施例中的两个第一位置传感器t1和第二位置传感器t2的感测值的反正切值时,反正切值可以在其中反正切值根据透镜镜筒1210和1220的位置逐渐增加的曲线图中表示,更具体地,反正切值可以在其中反正切值以基本上恒定的斜率不断增加或减小的曲线图中表示。
[0453]
在这种情况下,由于反正切值可以根据透镜镜筒在光轴方向上的运动而(恒定地)增加或减小,因此可以容易且精确地感测透镜镜筒1210和1220的位置。
[0454]
然而,反正切值可以包括其中反正切值根据感测值在中间跳跃的部分,并且在这种情况下,可以考虑跳跃部分来使用两个值g1和g2。
[0455]-实施例8-4(图52a至图53)
[0456]
图52a和图52b是示出根据另一示例性实施例的位置传感器(tmr角度传感器)和感测磁体之间的位置关系的图。图53是示出两个位置传感器(tmr角度传感器)的、根据透镜镜筒在图49所示的位置关系中的移动的感测值以及感测值的反正切的曲线图。
[0457]
参照图52a和图52b,壳体1010可以包括沿光轴方向布置的线圈1241b和1243b,并且沿光轴方向移动的透镜镜筒1210和1220可以具有磁化成至少两个磁极以与线圈1241b和1243b相对的磁体1241a和1243a。
[0458]
具体而言,在图52a中,可以设置四个线圈1241b和1243b以及被磁化为3磁极以与线圈相对的磁体1241a和1243a,并且可以设置两个线圈1241b和1243b以及被磁化为两磁极以与线圈相对的磁体1241a和1243a。
[0459]
感测磁体1241d和1243d可以与驱动磁体1241a和1243a分开地设置在透镜镜筒1210和1220中。感测磁体1241d和1243d可以设置成在光轴方向上交替地具有n极和s极。
[0460]
在壳体1010中,可以设置两个位置检测传感器1241c和1243c(在附图中标记为t1和t2),它们可以感测在垂直于光轴方向的方向上与之彼此相对的感测磁体1241d和1243d
的磁场的变化,即,例如,感测磁体1241d和1243d周围的磁场的变化。
[0461]
当感测磁体1241d和1243d在光轴方向(z轴方向)上移动时,位置传感器t1和t2,诸如tmr角度传感器,可以根据磁体1241d和1243d的位置而具有不同的感测值(单位,例如,度),并且在示例性实施例中,第一位置传感器t1和第二位置传感器t2的感测值可以根据感测磁体1241d和1243d的移动以正弦或余弦曲线呈现。tmr角度传感器可以感测从感测磁体1241d和1243d产生的磁力线的角度(即,感测通过tmr角度传感器的磁力线的角度),并且通常可以用于感测旋转物体的位置,但是在示例性实施例中,tmr角度传感器可以用于感测线性移动的透镜镜筒的位置。
[0462]
如图53所示,示例性实施例中的第一位置传感器t1和第二位置传感器t2可以设置在壳体1010中,使得根据感测磁体1241d和1243d的移动的感测值可以在其间具有90度的相位差。
[0463]
位置传感器的感测值之间的差值可以根据磁体1241d和1243d的磁化间隔、宽度等以及位置传感器的安装位置而变化,因此,位置传感器t1和t2可以安装在壳体1010中,使得在磁体1241d和1243d安装在透镜镜筒1210和1220中之后,感测值之间可以具有90度的相位差。
[0464]
当由图53所示的、第一位置传感器t1和第二位置传感器t2的感测值所指示的正弦或余弦曲线值中获得第一位置传感器t1和第二位置传感器t2的反正切值(即,反正切(t2/t1)的值)时,可以导出图53所示的线性线。即,当使用示例性实施例中的两个第一位置传感器t1和第二位置传感器t2的感测值的反正切值时,反正切值可以在其中反正切值根据透镜镜筒1210和1220的位置逐渐增加的曲线图中表示,更具体地,反正切值可以在其中反正切值以基本上恒定的斜率不断增加或减小的曲线图中表示。
[0465]
在这种情况下,由于反正切值可以根据透镜镜筒在光轴方向上的移动而(恒定地)增加或减小,因此可以容易且精确地感测透镜镜筒1210和1220的位置。
[0466]
然而,它可以包括其中反正切值根据感测值在中间跳跃的部分,并且在这种情况下,考虑到跳跃部分,可以使用值(g1、g2和g3)。
[0467]-实施例8-5(图54a至55)
[0468]
附图说明54a和54b是示出根据另一示例性实施例的位置传感器(霍尔传感器或通用tmr角度传感器)和感测磁体之间的位置关系的图。图55是示出根据透镜镜筒在图54b所示的位置关系中的移动的两个位置传感器(通用tmr传感器)的感测值以及感测值的加权减法值的曲线图。
[0469]
参照图54a和图54b,壳体1010可以包括沿光轴方向布置的四个线圈1241b和1243b,并且沿光轴方向移动的透镜镜筒1210和1220可以包括被磁化为4磁极的磁体1241a和1243a,以与线圈1241b和1243b相对。
[0470]
感测磁体1241d和1243d可以与驱动磁体1241a和1243a分开地设置在透镜镜筒1210和1220中。感测磁体1241d和1243d可以设置成在光轴方向上交替地具有n极和s极。
[0471]
壳体1010可以包括两个位置传感器1241c和1243c,它们可以感测感测磁体1241d和1243d周围的感测磁体1241d和1243d的磁场的变化。
[0472]
如图54a所示,当位置传感器1241c和1243c被配置为霍尔传感器或通用tmr传感器h1和h2时,位置传感器1241c和1243c可以被设置成与感测磁体1241d和1243d相对。如图54b
所示,当位置传感器1241c和1243c被配置为tmr角度传感器t1和t2时,位置传感器1241c和1243c可以设置在两侧,以具有大于感测磁体1241d和1243d在整个光轴方向上的长度的间隔。
[0473]
当感测磁体1241d和1243d沿光轴方向(z轴方向)移动时,位置传感器可以根据感测磁体1241d和1243d的位置而具有不同的感测值。
[0474]
两个感测值可以表示为具有相对于原点几乎水平对称的形状的图形,并且当对值进行加权减法时(透镜位置值=a*第一位置传感器感测值-b*第二位置传感器感测值,其中a和b是正数),所述值可以在其中透镜位置值根据位置逐渐增加或减小的曲线图中表示。更具体地说,所述值可以在这样的曲线图中表示,在该曲线图中,所示值以基本上恒定的斜率不断地增加或减小。
[0475]
例如,当位置传感器1241c和1243c被配置为tmr角度传感器t1和t2时,两个tmr角度传感器t1和t2的感测值可以在具有相对于图55所示的原点几乎水平对称的形状的曲线图中表示,并且当对值进行加权减法(透镜位置值=a*t1感测值-b*t2感测值,其中a和b是正数)时,可以在透镜位置值根据位置逐渐增加或减小的曲线图中表示所述值,更具体地,可以所述值以基本上恒定的斜率不断增加或减小的曲线图中表示所述值。
[0476]
也就是说,由于透镜位置值可以根据透镜镜筒在光轴方向上的移动而(恒定地)增加或减小,所以可以容易且精确地感测透镜镜筒1210和1220的位置。
[0477]-实施例8-6(图56)
[0478]
图56是示出根据另一示例性实施例的单个位置传感器(霍尔传感器或通用tmr角度传感器)和感测磁体之间的位置关系的图。
[0479]
参照图56,透镜镜筒1210和1220可以包括具有相对于光轴方向倾斜的结构的感测磁体1241d和1243d。感测磁体1241d和1243d可以相对于光轴在
±
10度内倾斜。
[0480]
感测磁体1241d和1243d以及位置传感器1241c和1243c可以彼此相对地设置。位置传感器1241c和1243c可以是霍尔传感器或通用tmr传感器h1和h2。
[0481]
感测磁体1241d和1243d可以具有与位置传感器1241c和1243c相对的表面,以被磁化为单磁极(n极或s极),因此,当透镜镜筒1210和1220沿光轴方向移动时,位置传感器1241c和1243c与感测磁体1241d和1243d之间的距离可以线性地增加或减小。因此,位置传感器1241c和1243c的感测值可以根据磁力的差而线性地增加或减小。
[0482]
因此,可以以简化的方式感测透镜镜筒1210和1220的位置。
[0483]-实施例8-7(图57至图58)
[0484]
图57是示出根据另一示例性实施例的两个位置传感器(霍尔传感器或通用tmr角度传感器)和感测磁体之间的位置关系的图。图58是示出根据透镜镜筒在图54b所示的位置关系中的移动的两个位置传感器(霍尔传感器或通用tmr角度传感器)的感测值以及感测值的加权减法值的曲线图。
[0485]
根据图56的位置感测可以是相对有效的,但是当透镜镜筒在光轴方向上移动相对长的距离以实现高性能变焦时,在预定距离或更远的距离内精确地感测位置感测可能是不容易的。
[0486]
因此,在图57中,可以提供两个或更多个位置传感器1241c和1243c。
[0487]
参照图57,透镜镜筒1210和1220可以包括具有相对于光轴方向倾斜的结构的感测
磁体1241d和1243d。感测磁体1241d和1243d可以相对于光轴在
±
10度内倾斜。
[0488]
可以设置至少两个位置传感器1241c和1243c以与感测磁体1241d和1243d相对。位置传感器1241c和1243c可以是霍尔传感器或通用tmr传感器h1和h2。
[0489]
感测磁体1241d和1243d可以具有与位置传感器1241c和1243c相对的表面,以被磁化为单磁极(n极或s极),因此,当透镜镜筒1210和1220沿光轴方向移动时,位置传感器1241c和1243c与感测磁体1241d和1243d之间的距离线性地增大或减小,使得位置传感器1241c和1243c的感测值可以根据磁力的差而线性增加或减小。
[0490]
然而,如图58所示,可能存在跳跃现象,其中当超过预定部分时,位置传感器1241c和1243c的感测值可能迅速下降或减小,并且因此,在位置传感器1241c和1243c的感测值中,其中值线性增加或减小的部分可以被采用并且可以用于位置感测。
[0491]
根据上述示例性实施例,示例性实施例中的相机模块可以实现诸如自动聚焦调整、变焦和光学图像稳定的功能,可以具有简化的结构,并且可以具有减小的尺寸。
[0492]
此外,在示例性实施例中,即使当提供多个透镜组时,多个透镜组也可以容易地在光轴方向上对准。
[0493]
此外,在示例性实施例中,可以包括允许多个透镜组在光轴方向上容易地移动的引导件。
[0494]
此外,变焦透镜和反射模块都可以包括止挡件或阻尼器,以便不偏离最佳位置。
[0495]
此外,为了实现变焦透镜的最大性能,可以通过多个位置传感器精确地测量变焦透镜的移动位置,并且可以使用感测的结果。
[0496]
虽然上面已经示出和描述了具体的示例,但是在理解本公开之后将显而易见的是,在不脱离权利要求及其等同的精神和范围的情况下,可以在这些示例中进行形式和细节上的各种改变。这里所描述的示例仅被认为是描述性的,而不是为了限制的目的。每个示例中的特征或方面的描述被认为可应用于其它示例中的类似特征或方面。如果以不同的顺序执行所描述的技术,和/或如果以不同的方式组合和/或用其它部件或它们的等同替换或增补所描述的系统、架构、装置或电路中的组件,则也可以获得合适的结果。因此,本公开的范围不通过具体实施方式限定,而是通过权利要求及其等同限定,并且在权利要求及其等同的范围之内的全部变型应被理解为包括在本公开中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1