一种全自动水平对轴耦合装置的制作方法
1.本实用新型涉及光通信领域,具体涉及一种全自动水平对轴耦合装置。
背景技术:
2.目前,我国光无源器件生产90%以上是靠手工、半自动完成,在对光开关进行对准耦合时,通常利用微调架采取常规手动操作完成光纤插针和透镜之间的对准耦合,具体为:通过手动旋转微调架上x、y、z和thx轴微调手轮,进行反复调节确认,使光纤插针实现四个维度上的运动,从而通过改变光纤插针和透镜的相对位置来进行调光。但这种手动耦合的调试方法存在以下问题:
3.(1)调节困难,光纤纤径一般为μm量级,对于光束在两个旋转维度以及两个平移维度实现μm量级的精密调整,人工实现空间光耦合对准费工费时。
4.(2)对光学元件要求较高,耦合效率不仅与透镜的相对孔径、光纤的模场半径还与入射高斯光束在透镜表面的模斑半径相关。其余参数一定时,模斑半径越大耦合效率越高。为了得到最大的耦合效率,需要寻找满足上述所有条件的透镜,制作成本高,且调节困难。
5.(3)无法实现自动对准,当环境改变或者激光器变化引起光斑位置、大小等变化,需要人为调节,无法自动对准,费时费力。
技术实现要素:
6.(一)要解决的技术问题
7.本实用新型的目的在于克服上述现有系统的不足,提供一种全自动水平对轴耦合装置,通过电动控制x轴、y轴、z轴等3轴直线位移台和θ
x
轴、θy轴、θz轴等3轴角度位移台,进而精准调节两个光纤的水平对轴度,实现最大光纤耦合效率,且省时省力。
8.(二)技术方案
9.本实用新型为解决其技术问题,提供了一种全自动水平对轴耦合装置,通过以下技术方案来实现:
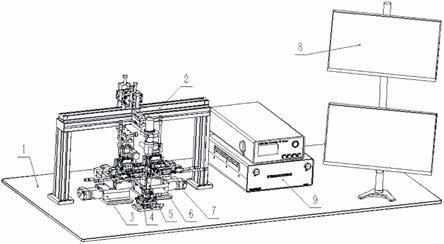
10.一种全自动水平对轴耦合装置,包括面包板1、龙门观察系统2、六轴电动位移台组件左3、水平光纤夹具组件左4、三轴位移调整载物台组件5、六轴电动位移台组件右6、水平光纤夹具组件右7、显示器及支架组件8以及电气部件9;其中,龙门观察系统2通过螺钉固定在面包板1上;六轴电动位移台组件左3固定在面包板1上,且位于龙门观察系统左前方;水平光纤夹具组件左4固定在六轴电动位移台组件左3中x轴电动弧摆台3.7正上方;三轴位移调整载物台组件5固定在面包板1上,且位于六轴电动位移台组件左3和六轴电动位移台组件右6正中央,其载台5.23中心对准光纤4.9;显示器及支架组件8固定在面包板1上,位于龙门观察系统2右前方。
11.所述龙门观察系统2包括龙门架2.1、垂直观察相机组件2.2和水平观察相机组件2.3,用来调节垂直观察相机组件2.2和水平观察相机组件2.3与芯片5.21或者光纤4.9的工作距离以便观察芯片5.21或者光纤4.9。
12.所述龙门架2.1包括龙门架立柱2.12和2个龙门架横梁2.14,其中龙门架立柱2.12固定在龙门架底板2.11上,横梁2.14两端分别固定在1个龙门架立柱2.12上,导轨底板2.15固定在横梁2.14上,导轨底板2.15两端分别固定导轨挡块2.13,导轨2.16固定在导轨底板2.15上,导轨配有可移动滑块2.17。
13.所述垂直观察相机组件2.2,包括若干个位移台2.21、若干个位移台2.23、支架2.24和相机2.27;其中,支架2.24固定在滑块2.17上,第一个位移台2.23沿x轴方向固定在支架2.24后方,第一个位移台2.21通过第一个转接板2.22沿z轴方向固定在第一个位移台2.23后方;第二个位移台2.23沿x轴方向固定在支架2.24前方,第二个位移台2.21通过第二个转接板2.22沿z轴方向固定在第一个位移台2.23后前方;l型转接板2.25垂直面沿z轴方向与第二个位移台2.21固定在一起,水平面沿y轴方向与垂直相机连接板2.26固定在一起;垂直相机2.27通过孔轴配合以及螺钉与垂直相机连接板2.26连接在一起。
14.所述水平观察相机组件2.3包括z轴连接板2.31、位移台2.23和水平相机2.34;其中,z轴连接板2.31固定在垂直相机观察组件2.2中第一个位移台2.21后方,转接板2.32与z轴连接板2.31连接在一起,位移台2.23沿y轴方向与转接板2.32固定在一起,水平相机连接板2.33与位移台2.23连接在一起,水平相机2.34通过孔轴配合以及螺钉与水平相机连接板2.33连接在一起。
15.所述六轴电动位移台组件左3,包括底板3.1、x轴电动位移台3.2、y轴电动位移台3.3、z轴电动位移台3.4以及若干个电动弧摆台3.5;其中,x轴电动位移台3.2水平固定在底板3.1上,且电机朝向左方;y轴电动位移台3.3通过水平固定在x轴电动位移台3.2上,且电机朝向后方;z轴电动位移台3.4通过垂直安装的支架3.6竖直固定在y轴电动位移台3.3,其电机朝向上方;θx轴方向电动弧摆台3.5通过转接板3.7竖直固定在z轴电动位移台3.4上,且电机朝向上方;θz轴方向的电动弧摆台3.5通过转接板3.7水平固定在θ
x
轴方向的电动弧摆台3.5上,且电机朝向左方;θy轴方向的电动弧摆台3.5通过水平安装的支架3.6水平固定在θz轴方向的电动弧摆台3.5上,且电机朝向左方;六轴电动位移台组件左3将水平光纤夹具组件左4调整到合适的位置,以便光纤4.9能够在龙门观察系统2可观察工作距离内。
16.所述水平光纤夹具组件左4,包括可滑动底座4.1、支撑座4.2、翻盖左4.4、翻盖右4.6和延长翻盖4.8;其中,支撑座4.2固定在可滑动底座4.1上,一个光纤v型卡4.3安装固定在支撑座4.2左方,另一个光纤v型卡4.3安装在支撑座4.2的u型槽内,带有销轴孔的夹具板一4.5安装固定在支撑座4.2后侧方,带有销轴孔夹具板二4.7安装固定在支撑座4.2后侧方,翻盖左4.4通过销轴与夹具板一4.5连接在一起,翻盖右4.6通过销轴与夹具板一4.5连接在一起,延长翻盖4.8通过销轴与夹具板二4.7连接在一起。
17.所述支撑座4.2分别设有孔a、孔b、孔c和孔d,所述孔a、孔b、孔c和孔d中分别放置一块圆形磁铁。
18.所述翻盖左4.4设有u型槽e,所述翻盖右4.6设有u型槽f,所述延长翻盖4.8设有u型槽g;所述u型槽e、u型槽f和u型槽g中分别放置一块硅胶块。
19.所述三轴位移调整载物台组件5由三轴位移台5.1和可调整载物台5.2组成;其中,可调整载物台5.2包括载台底座5.26、升降板5.25和载台5.23;可调整载物台5.2用来放置芯片5.21,以及在x、y、z三轴方向调整芯片5.21到龙门观察系统可观察工作距离内。
20.所述六轴电动位移台组件右6与六轴电动位移台组件左3在结构布置上成左右对
称件。
21.所述水平光纤夹具组件右7与水平光纤夹具组件左4在结构布置上成左右对称件。
22.所述显示器及支架组件8,包括双显示器支架以及两个显示器。用来将龙门观察系统所捕获的数据信息,以图像的方式展示在显示器屏幕上,以便于观察与识别分析。
23.所述电气部件9,包括电源、以及六轴控制器,其作用是提供电源以及控制整个装置平稳运行;其中,六轴控制器是控制光纤在x轴、y轴、z轴的位移和θ
x
轴、θy轴、θz轴的角位移。
24.(三)有益效果
25.相对于现有技术而言,本实用新型具有以下技术优势。龙门观察系统可以调节待测芯片到观察范围内。左、右两个六轴电动位移台可快速调节光纤在x轴、y轴、z轴的位移和θ
x
轴、θy轴、θz轴的角位移,使光纤精准对准并接触待测芯片。左、右两个水平光纤夹具组件设置成销轴翻转机构,可以方便放置光纤;且内部放置若干磁铁和硅胶块,使翻盖与支撑座能够紧紧夹住光纤且不损伤光纤;左、右两个水平光纤夹具组件均可在θy轴方向电动弧摆台上水平滑动,从而可以光纤与相机透镜之间的距离,以便光纤的发射端处于相机透镜的焦点上,从而提高了输入光纤的传输效率。三轴位移调整载物台组件不仅可粗调芯片在z轴方向位移,而且可精调待测芯片在x轴、y轴、z轴方向位移。
附图说明
26.图1为本实用新型总装示意图。
27.图2为本实用新型的6轴坐标系示意图。
28.图3为龙门观察系统示意图。
29.图4为六轴电动位移台组件左示意图。
30.图5为水平光纤夹具组件左示意图。
31.图6为水平光纤夹具组件翻盖绕销轴旋转成一定角度意图。
32.图7为三维位移调整载物台示意图,以及可调整载物台示意图。
33.图8为光纤水平对轴耦合示意图。
34.图1中,1面包板,2龙门观察系统,3六轴电动位移台组件左,4水平光纤夹具组件左,5三轴位移调整载物台组件,6六轴电动位移台组件右,7水平光纤夹具组件右,8显示器及支架组件,9电气部件。
35.图3中,2.1龙门架,2.2水平观察相机组件,2.3垂直观察相机组件,2.11龙门架底板,2.12龙门架立柱,2.13导轨挡块,2.14龙门架横梁,2.15导轨底板,2.16导轨,2.17滑块,2.21位移台,2.22转接板,2.23位移台,2.24支架,2.25l型转接板,2.26垂直相机连接板,2.27垂直相机,2.31z轴连接板,2.32转接板,2.33水平相机连接板,2.34水平相机。
36.图4中,3.1底板,3.2 x轴电动位移台,3.3 y轴电动位移台,3.4 z轴电动位移台,3.5电动弧摆台,3.6支架,3.7转接板。
37.图5中,4.1可滑动底座,4.2支撑座,4.3光纤v型卡,4.4翻盖左,4.5夹具板一,4.6翻盖右,4.7夹具板二,4.8延长翻盖,4.9光纤。
38.图7中,5.1移台,5.2可调整载物台,5.21芯片,5.22芯片顶块,5.23载台,5.24手拧螺钉,5.25升降板,5.26台底座,5.27燕尾滑块,5.28导轨。
具体实施方式
39.为使本实用新型的目的、技术方案及有益效果更加清楚,下面将结合本实用新型中的附图,对本实用新型的技术方案进行清楚地描述。
40.如图1所示,本实用新型提供了一种全自动水平对轴耦合装置。其工作原理如下:
41.启动电源、打开显示器以及打开相关电气部件。粗调三维位移调整载物台组件5中芯片5.21至设计位置附近;粗调水平观察相机组件2.2,使相机透镜移动至其工作距离;粗调垂直观察相机组件2.3位移,使相机透镜移动其工作距离;并使水平观察相机组件2.2和垂直观察相机组件2.3的透镜焦点对准载台5.23上的芯片中心。
42.粗调水平光纤夹具组件左4、水平光纤夹具组件右7分别在六轴电动位移台组件左3、六轴电动位移台组件右6上x轴方向位移,使水平光纤夹具组件左4、水平光纤夹具组件右7距离在左、右光纤4.9耦合工作距离内。
43.将水平光纤夹具组件左4中翻盖左4.4绕夹具板一4.5成一定角度,将翻盖右4.6绕夹具板一4.5成一定角度,将延长翻盖4.8绕夹具板二4.7成一定角度。将光纤4.9两端分别轻轻放置在两个v型卡的卡槽内,然后依次合上翻盖左4.4、翻盖右4.6、延长翻盖4.8,光纤4.9在硅胶的保护下,以及磁铁紧紧吸翻盖作用力下而被压住。同理,水平光纤夹具组件右7中放置光纤4.9。
44.通过电控精调六轴电动位移台组件左3、六轴电动位移台组件右6,使左、右光纤在耦合工作距离内精准接触载台5.23上的芯片。
45.本技术中所描述的具体实施案例仅仅是对本实用新型的主要思想作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例作各种修改或补充或采用类似的方式替代,但并不会偏离本实用新型的精神或者超越所附权利要求书所定义的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1