相机模块和便携式设备的制作方法
相机模块和便携式设备
1.相关申请的交叉引用
2.本技术要求于2021年3月9日在韩国知识产权局提交的第10-2021-0030943号韩国专利申请和于2021年11月4日在韩国知识产权局提交的第10-2021-0150806号韩国专利申请的优先权的权益,上述韩国专利申请的全部公开内容通过引用并入本文中以用于所有目的。
技术领域
3.本发明涉及能够进行变焦的相机模块。
背景技术:
4.相机模块可配置成能够进行自动对焦或变焦。例如,具有前一功能的相机模块可以通过在光轴方向上大致移动一个或所有透镜组来调节焦点。作为另一示例,具有后一功能的相机模块可以通过在光轴方向上移动多个透镜组之中的至少两个或更多个透镜组来执行变焦。由于仅具有自动对焦功能的相机模块具有移动一个或所有透镜组的结构,因此透镜组之间的光轴失配不是大问题。然而,由于包括变焦功能的相机模块具有移动多个透镜组的结构,所以被致动的透镜组的光轴可能失配。
技术实现要素:
5.提供本发明内容部分旨在以简要的形式介绍对发明构思的选择,而在下面的具体实施方式部分中将进一步描述这些发明构思。本发明内容部分目的不在于确认所要求保护的主题的关键特征或必要特征,也不籍此帮助确定所要求保护的主题的范围。
6.在总的方面,相机模块包括:第一透镜模块,包括第一透镜组,并且配置成沿着光轴移动;第一驱动器,配置成驱动第一透镜模块;第二透镜模块,包括第二透镜组,设置在第一透镜模块上,并且配置成当第一透镜模块由第一驱动器驱动时沿着光轴移动;第二驱动器,配置成独立于第一透镜模块驱动第二透镜模块;以及壳体,配置成容纳第一透镜模块和第二透镜模块。第一透镜组和第二透镜组沿着光轴在朝向图像传感器的方向上顺序布置。
7.第一驱动器可以包括设置在第一透镜模块中的第一驱动磁体和设置在壳体中的第一驱动线圈。第二驱动器可以包括设置在第二透镜模块中的第二驱动磁体和设置在壳体中的第二驱动线圈。
8.相机模块还可以包括设置在第一透镜模块和第二透镜模块之间以便于第二透镜模块和第一透镜模块之间的相对运动的球支承件。
9.第一驱动器和第二驱动器可以设置成相对于光轴彼此面对。
10.第一透镜模块在光轴上由第一驱动器移动的位移可以大于第二透镜模块在光轴上由第二驱动器移动的位移。
11.相机模块还可以包括设置在壳体中以便于第一透镜模块在光轴上的移动的第一引导件。
12.第一引导件可包括球支承件和棒状构件中的一个或两个。
13.相机模块还可以包括:第一磁体,设置在壳体和第一透镜模块中的每一个处,以将第一透镜模块限制到壳体;以及第二磁体,设置在壳体和第二透镜模块中的每一个处,以将第二透镜模块限制到壳体。
14.第一磁体在光轴上的长度可以大于第二磁体在光轴上的长度。
15.相机模块还可以包括设置在第一透镜模块的物侧上的第三透镜模块。
16.相机模块还可以包括设置在第一透镜模块的物侧上的光路转换器。
17.在另一个总的方面,相机模块包括:第一透镜模块,包括第一透镜组,并且配置成在第一透镜组的光轴上移动;第二透镜模块,包括第二透镜组,并且配置成在光轴上移动;第三透镜模块,包括第三透镜组,并且配置成在光轴上移动;以及壳体,配置成容纳第一透镜模块、第二透镜模块和第三透镜模块。第一透镜组、第二透镜模块和第三透镜组沿着光轴顺序布置,并且第一透镜模块和第三透镜模块设置在第二透镜模块上。
18.相机模块还可以包括设置在第一透镜模块和第二透镜模块之间以便于第一透镜模块移动的第一球支承件,以及设置在第二透镜模块和第三透镜模块之间以便于第三透镜模块移动的第二球支承件。
19.第二透镜模块可以包括配置成容纳第一球支承件的第一引导凹槽和配置成容纳第二球支承件的第二引导凹槽。
20.相机模块还可以包括配置成在光轴方向上驱动第一透镜模块的第一驱动器、配置成在光轴方向上驱动第二透镜模块的第二驱动器以及配置成在光轴方向上驱动第三透镜模块的第三驱动器。
21.第一驱动器和第三驱动器可以设置成相对于光轴与第二驱动器彼此面对。
22.在另一个总的方面,相机模块包括:第一透镜模块,包括第一透镜组;第二透镜模块,包括第二透镜组,并且配置成沿着光轴移动;第一驱动器,配置成驱动第二透镜模块;第三透镜模块,包括第三透镜组,设置在第二透镜模块上,并且配置成在被驱动时与第二透镜模块一致地移动;第二驱动器,配置成独立于第二透镜模块驱动第三透镜模块;以及壳体,配置成容纳第一透镜模块、第二透镜模块和第三透镜模块。第一透镜组、第二透镜组和第三透镜组沿着光轴顺序布置,并且第一驱动器对第二透镜模块的移动距离小于第二驱动器对第三透镜模块的移动距离。
23.相机模块还可以包括:第一容纳部分,形成在第二透镜模块中,并且配置成容纳第一驱动器的第一驱动磁体;以及第二容纳部分,形成在第三透镜模块中,并且配置成容纳第二驱动器的第二驱动磁体。
24.第一容纳部分可以延伸到图像传感器侧,并且第二容纳部分可以延伸到物侧。
25.在另一个总的方面,便携式设备包括相机模块。相机模块包括:第一透镜模块,包括第一透镜组,并且配置成沿着光轴移动;第二透镜模块,包括第二透镜组,并且可滑动地联接到第一透镜模块;第一驱动器,配置成驱动第一透镜模块和第二透镜模块;第二驱动器,配置成独立于第一透镜模块驱动第二透镜模块;以及壳体,配置成容纳第一透镜模块和第二透镜模块。
26.第一透镜模块还可以包括支承部分,并且第二透镜模块可滑动地联接到支承部分。
27.相机模块还可以包括形成在支承部分中的引导凹槽和设置在引导凹槽中的球支承件。
28.根据所附权利要求、附图和下面的具体实施方式,其它特征和方面将变得显而易见。
附图说明
29.图1是示出根据一个或多个实施方式的相机模块的示例的部件的视图。
30.图2是图1所示的相机模块的联接立体图。
31.图3a至图4c是图2所示的相机模块的截面图。
32.图5a至图5c是示出图2所示的相机模块的操作状态的视图。
33.图6和图7是图2所示的相机模块的其它形式。
34.图8是图7所示的相机模块的截面图。
35.图9是示出根据一个或多个实施方式的相机模块的另一示例的部件的视图。
36.图10是图9所示的相机模块的联接立体图。
37.图11至图12e是图10所示的相机模块的截面图。
38.图13是图10所示的相机模块的另一形式。
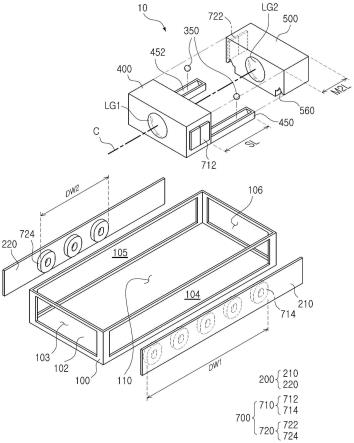
39.图14a和图14b分别是根据一个或多个实施方式的相机模块的示例的分解立体图和联接立体图。
40.图15是图14a至图14b所示的光路转换模块的放大立体图。
41.图16是图15所示的光路转换模块的分解立体图。
42.图17是图14a至图14b所示的透镜模块的放大立体图。
43.图18a是图14a至图14b所示的透镜模块的分解立体图。
44.图18b是图18a所示的透镜模块的仰视立体图。
45.图19是图14a至图14b所示的相机模块的部分联接立体图。
46.图20是沿图19所示的相机模块的线i-i截取的截面图。
47.图21a是沿图19所示的相机模块的线ii-ii截取的截面图。
48.图21b是图21a所示的透镜模块的修改示例的截面图。
49.图22是沿图19所示的相机模块的线iii-iii截取的截面图。
50.图23至图25是示出图19所示的相机模块的操作状态的视图。
51.图26是示出根据一个或多个实施方式的便携式设备的示例的视图。
52.在整个附图和具体实施方式中,相同的附图标记指代相同的元件。出于清楚、说明和方便的目的,附图可能未按照比例绘制,并且附图中元件的相对尺寸、比例和描绘可能被夸大。
具体实施方式
53.提供以下具体实施方式以帮助读者获得对本文中所描述的方法、装置和/或系统的全面理解。然而,本文中所描述的方法、装置和/或系统的各种改变、修改和等同在理解本技术的公开内容之后将是显而易见的。例如,本文中所描述的操作的顺序仅仅是示例,并且除了必须以特定顺序发生的操作之外,不限于在本文中所阐述的顺序,而是可以改变的,这
在理解本技术的公开内容之后将是显而易见的。另外,为了更加清楚和简洁,可省略对在本领域中公知的特征的描述。
54.本文中所描述的特征可以以不同的形式实施,而不应被理解为受限于本文中所描述的示例。更确切地,提供本文中所描述的示例仅仅是为了说明在理解本技术的公开内容之后将显而易见的实现本文中所描述的方法、装置和/或系统的许多可能的方式中的一些。
55.在整个说明书中,当诸如层、区域或基板的元件被描述为位于另一元件“上”、“连接到”或“联接到”另一元件时,该元件可直接位于该另一元件“上”、直接“连接到”或直接“联接到”另一元件,或者可存在介于该元件与该另一元件之间的一个或多个其它元件。相反地,当元件被描述为“直接位于”另一元件“上”、“直接连接到”或“直接联接到”另一元件时,则不存在介于该元件与该另一元件之间的其它元件。
56.如本文中所使用的,措辞“和/或”包括相关联的所列项目中的任何一项以及任何两项或更多项的任何组合。
57.尽管在本文中可以使用诸如“第一”、“第二”和“第三”的措辞来描述各种构件、部件、区域、层或部分,但是这些构件、部件、区域、层或部分不受这些措辞的限制。更确切地,这些措辞仅用于将一个构件、部件、区域、层或部分与另一个构件、部件、区域、层或部分区分开。因此,在不背离本文中所描述的示例的教导的情况下,这些示例中提及的第一构件、第一部件、第一区域、第一层或第一部分也可以被称作第二构件、第二部件、第二区域、第二层或第二部分。
58.诸如“在
……
之上”、“较上”、“在
……
之下”和“较下”的空间相对措辞可以在本文中为了描述便利而使用,以描述如附图中所示的一个元件相对于另一个元件的关系。除了涵盖附图中所描绘的定向之外,这些空间相对措辞旨在还涵盖设备在使用或操作中的不同的定向。例如,如果附图中的设备翻转,则描述为位于另一元件“之上”或相对于另一元件“较上”的元件将位于该另一元件“之下”或相对于该另一元件“较下”。因此,根据设备的空间定向,措辞“在
……
之上”涵盖“在......之上”和“在......之下”的两个定向。该设备还可以以其它方式定向(例如,旋转90度或在其它定向上),并且本文中使用的空间相对措辞应被相应地解释。
59.本文中使用的术语仅用于描述各种示例,而不用于限制本公开。除非上下文另有明确指示,否则冠词“一”、“一个”和“该”旨在也包括复数形式。措辞“包括”、“包含”和“具有”说明存在所述特征、数字、操作、构件、元件和/或它们的组合,但不排除一个或多个其它特征、数字、操作、构件、元件和/或它们的组合的存在或添加。
60.仅作为非穷举的示例,本文描述的便携式设备可以是诸如蜂窝电话、智能电话、可佩戴智能设备(例如戒指、手表、眼镜、手镯、踝链、腰带、项链、耳环、头饰带、头盔、或嵌入衣服中的设备)、便携式个人计算机(pc)(例如膝上型电脑、笔记本电脑、小型笔记本电脑、上网本、或超移动pc(umpc))、平板pc(平板电脑)、平板手机、个人数字助理(pda)、数码相机、便携式游戏控制台、mp3播放器、便携式/个人多媒体播放器(pmp)、手持电子书、全球定位系统(gps)导航设备、或传感器的移动设备,或者诸如台式pc、高清电视(hdtv)、dvd播放器、蓝光播放器、机顶盒、或家用电器的固定设备,或者配置成执行无线或网络通信的任何其它移动或固定设备。在一个示例中,可佩戴设备是设计成可直接安装在使用者的身体上的设备,例如一副眼镜或手镯。在另一示例中,可佩戴设备是使用附接设备安装在用户的身体上的
任何设备,例如使用臂带连接到用户的手臂上或者使用挂带悬挂在用户颈部周围的智能电话或平板电脑。
61.由于制造技术和/或公差,可出现附图中所示形状的变化。因此,本文中描述的示例不限于附图中所示的具体形状,而是包括在制造期间出现的形状变化。
62.可以以在理解本技术的公开内容之后将显而易见的各种方式组合本文中描述的示例的特征。此外,尽管本文中描述的示例具有多种配置,但是在理解本技术的公开内容之后将显而易见的其它配置也是可行的。
63.本文所述的相机模块可安装在便携式电子产品上。例如,相机模块可以安装在便携式电话、笔记本计算机等中。然而,根据当前一个或多个实施方式的相机模块的使用范围不限于上述电子设备。例如,相机模块可以安装在需要屏幕捕获和视频捕获(例如运动检测、图像捕获、人脸识别、虹膜识别、虚拟现实实现、增强现实实现等)的任何电子设备中。
64.根据本公开的一个方面,相机模块可以配置成包括多个透镜模块。例如,相机模块可以包括第一透镜模块和第二透镜模块,第一透镜模块包括第一透镜组,并且第二透镜模块包括第二透镜组。然而,构成相机模块的透镜模块的数量不限于两个。例如,相机模块还可以包括设置在第一透镜模块的前面(物侧)或后面(像侧,即在第一透镜模块和第二透镜模块之间)的第三透镜模块。第一透镜模块和第二透镜模块可以沿着光轴顺序设置。详细地说,第一透镜模块可以设置成比第二透镜模块更靠近物侧。
65.相机模块可配置成能够进行自动对焦或变焦。例如,相机模块的自动对焦或变焦可以通过驱动第一透镜模块和第二透镜模块来执行。作为具体示例,可以通过以相同的尺寸移动第一透镜模块和第二透镜模块来调整相机模块的焦点,并且可以通过以不同的尺寸移动第一透镜模块和第二透镜模块来执行相机模块的变焦。
66.相机模块可以包括用于驱动第一透镜模块和第二透镜模块的第一驱动器和第二驱动器。第一驱动器可以配置成在光轴方向上移动第一透镜模块,并且第二驱动器可以配置成在光轴方向上移动第二透镜模块。
67.根据一个或多个实施方式,相机模块可以配置成使得多个透镜模块被整体驱动。例如,第一透镜模块和第二透镜模块可以配置成在特定区段中整体移动。详细地说,第二透镜模块可以在安装在第一透镜模块上的状态下移动。然而,第二透镜模块并不总是与第一透镜模块整体地驱动。例如,可以独立地驱动第二透镜模块,而与第一透镜模块的驱动无关。
68.根据当前一个或多个实施方式,相机模块可以最小化当第一透镜模块和第二透镜模块被独立驱动时可能出现的问题。例如,上述配置可以最小化第一透镜模块的光轴和第二透镜模块的光轴之间的失配现象。作为另一示例,可以最小化驱动器对透镜模块的实际驱动宽度。作为具体示例,在上述配置中,通过将第一透镜模块和第二透镜模块向前(物侧)移动第一距离,然后将第二透镜模块向前移动第二距离,可以实现将第二透镜模块移动第一距离和第二距离的效果。作为另一示例,上述配置对于实现具有相对长的后焦距的摄远相机模块或具有4倍或更多倍的变焦比的变焦相机模块可能是有利的。
69.根据本公开中的一个或多个实施方式的相机模块的另一示例可以包括第一透镜模块、第二透镜模块和第三透镜模块。例如,相机模块可以包括沿着光轴顺序布置的第一透镜模块、第二透镜模块和第三透镜模块。透镜模块中的每个可以包括一个或多个透镜。例
如,第一透镜模块可以包括一个透镜,第二透镜模块可以包括两个或更多个透镜,并且第三透镜模块可以包括两个或更多个透镜。然而,构成透镜模块的透镜的数量的配置不限于上述形式。
70.相机模块可以配置成能够进行自动对焦或变焦。例如,相机模块可以配置成通过在光轴方向上移动第一透镜模块至第三透镜模块来执行自动对焦或变焦。第一透镜模块至第三透镜模块可以配置成具有不同的驱动位移。例如,第一透镜模块可以配置成具有非常小的驱动位移或者不被驱动,并且第二透镜模块和第三透镜模块可以配置成具有显著的驱动位移。
71.根据另一方面,相机模块可以配置成使得多个透镜模块被整体驱动。例如,第二透镜模块和第三透镜模块可以配置成在特定区段中整体移动。详细地说,第三透镜模块可以在安装在第二透镜模块上的状态下移动。然而,第三透镜模块并不总是与第二透镜模块整体地驱动。例如,不管第二透镜模块是否被驱动,第三透镜模块可以在第二透镜模块上在光轴方向上被独立地驱动。
72.第二透镜模块的驱动器和第三透镜模块的驱动器可以设置成关于相机模块中的光轴彼此面对。例如,第二透镜模块的驱动器可以相对于光轴设置在一侧,并且第三透镜模块的驱动器可以相对于光轴设置在另一侧。因此,第二透镜模块和第三透镜模块可以在光轴方向上直线移动,而不会由于第二透镜模块的驱动器和第三透镜模块的驱动器的力的和而抖动。
73.在相机模块中,第二透镜模块的位置检测传感器和第三透镜模块的位置检测传感器可以设置成基于光轴彼此面对。例如,第二透镜模块的位置检测传感器可以相对于光轴设置在一侧,并且第三透镜模块的位置检测传感器可以相对于光轴设置在另一侧。因此,根据本公开,相机模块可以快速且精确地检测第二透镜模块和第三透镜模块的位置。
74.根据本公开的另一方面,相机模块可以配置成便于透镜模块的光轴对准。例如,第一透镜模块和第二透镜模块可以配置成通过共享一种类型的光轴对准器而在光轴上彼此对准,并且第三透镜模块可以在第二透镜模块上自对准,以便与第二透镜模块的光轴对准。因此,根据本公开,相机模块可以仅通过顺序地组装第一透镜模块至第三透镜模块来快速且精确地对准第一透镜模块至第三透镜模块的光轴。
75.在下文中,将基于所附说明性附图来详细描述本公开中的一个或多个实施方式。
76.首先,参考图1至图8描述根据一个或多个实施方式的相机模块的示例。
77.根据一个或多个实施方式的相机模块10可以包括壳体100、第一透镜模块400和第二透镜模块500。然而,相机模块10的配置不限于壳体100、第一透镜模块400和第二透镜模块500。例如,相机模块10还可以包括基板构件200(210和220)和驱动器700(710和720)。作为另一示例,相机模块10还可以包括设置在第一透镜模块400和第二透镜模块500的成像侧的图像传感器(未示出)。
78.壳体100通常可以形成为矩形平行六面体形状。然而,壳体100的形状不限于矩形平行六面体。壳体100可以配置成使得除一个表面之外的其它部分是敞开的。例如,壳体100可以形成为除了底部部分102之外所有四个侧表面103、104、105和106以及上部部分是敞开的。壳体100的一些敞开的侧表面103和106可以用作光的通道。例如,壳体100的第一侧表面103可以用作光入射通过的路径,并且第四侧表面106可以用作光发射通过的路径。壳体100
的其它敞开的侧表面104和105可用作基板构件200(210和220)的布置空间。例如,第一基板210可以设置在壳体100的第二侧表面104上,并且第二基板220可以设置在壳体100的第三侧表面105上。
79.壳体100可以配置成容纳第一透镜模块400和第二透镜模块500。例如,在壳体100的内部空间110中,第一透镜模块400和第二透镜模块500可以在纵向方向上并排设置。壳体100的内部空间110可以形成为具有相当大的尺寸。例如,壳体100的内部空间110可以形成为允许驱动第一透镜模块400和第二透镜模块500的尺寸。
80.基板构件200可配置成多个。例如,基板构件200可以包括第一基板210和第二基板220。然而,基板构件200不必包括多个基板。例如,基板构件200可以设置成使得第一基板210和第二基板220彼此连接。基板构件200可以配置成软或硬的形式。基板构件200可配置成容纳驱动器700的一些部件。驱动器700的一部分,例如,驱动线圈714和724,可以分别设置在第一基板210和第二基板220上。
81.第一透镜模块400可以设置在壳体100的内部空间110中,并且可以配置成在壳体100的内部空间110中沿着光轴c移动。详细地说,第一透镜模块400可以配置成在壳体100的底部部分102上沿光轴c移动。
82.第一透镜模块400可以配置成折射入射光。例如,第一透镜模块400可以包括第一透镜组lg1。第一透镜组lg1可以包括具有正屈光力或负屈光力的一个或多个透镜。例如,第一透镜组lg1可以包括具有正屈光力的透镜和具有负屈光力的透镜。然而,构成第一透镜组lg1的透镜的数量和类型不限于上述形式。例如,第一透镜组lg1可以包括具有正屈光力或负屈光力的单个透镜。
83.第一透镜模块400可以配置成与第二透镜模块500一致地驱动。例如,可以在第一透镜模块400的一侧上形成支承部分450,第二透镜模块500可以设置在支承部分450上。
84.支承部分450可以配置成支承第二透镜模块500的底表面。例如,支承部分450可以形成为支承第二透镜模块500的左底表面和右底表面。支承部分450可以沿着光轴c方向形成。例如,支承部分450可以在从第一透镜模块400的一个侧表面朝向图像传感器(或成像面)的方向上形成。支承部分450可以形成为具有显著的长度。例如,支承部分450的长度sl可以大于第二透镜模块500的长度m2l。上述支承部分450和第二透镜模块500之间的尺寸关系可以使得第二透镜模块500能够在光轴c方向上被驱动。例如,除了第一透镜模块400的驱动之外,第二透镜模块500可以在支承部分450上在光轴c方向上移动sl-m2l的尺寸。
85.用于便于驱动第二透镜模块500的装置可以形成或设置在支承部分450上。例如,引导凹槽452可以沿着光轴c方向形成在支承部分450中,并且球支承件350可以设置在引导凹槽452中。因此,第二透镜模块500可经由设置在引导凹槽452中的球支承件350在支承部分450上快速且平滑地移动。作为参考,在本公开中,球支承件350被描述为支承部分450和第二透镜模块500之间的摩擦减小器,但是摩擦减小器不限于球支承件类型。例如,可以以另一种形式使用滚动支承件,以减小支承部分450和第二透镜模块500之间的摩擦。作为另一示例,在用于减小支承部分450和第二透镜模块500之间的摩擦的另一种形式中,可以在支承部分450或第二透镜模块500上形成具有半球形或半圆形形状的突起。
86.第二透镜模块500可以配置成通过入射通过第一透镜模块400的光在图像传感器或成像面上形成图像。例如,第二透镜模块500可以包括第二透镜组lg2。第二透镜组lg2可
以包括具有正屈光力或负屈光力的一个或多个透镜。例如,第二透镜组lg2可以包括具有正屈光力的透镜和具有负屈光力的透镜。然而,构成第二透镜组lg2的透镜的数量和类型不限于此。例如,第二透镜组lg2可以包括具有正屈光力或负屈光力的单个透镜。
87.第二透镜模块500可以设置在第一透镜模块400上。例如,第二透镜模块500可以设置在第一透镜模块400的支承部分450上。第二透镜模块500可以配置成在支承部分450上移动。例如,第二透镜模块500可以经由设置在引导凹槽452和引导凹槽560之间的球支承件350在支承部分450上在光轴c方向上移动。支承部分450的引导凹槽452和第二透镜模块500的引导凹槽560可以形成为稳定地接触球支承件350。例如,引导凹槽452和560可以具有三角形截面形状,以便在至少两个点上与球支承件350接触。然而,引导凹槽452和560的截面形状不限于三角形。例如,其中容纳有球支承件350的引导凹槽452的截面可以形成为四边形形状。
88.驱动器700可以配置成驱动第一透镜模块400和第二透镜模块500。例如,第一驱动器710可以配置成驱动第一透镜模块400,并且第二驱动器720可以配置成驱动第二透镜模块500。驱动器700可以包括驱动磁体和驱动线圈。例如,第一驱动器710可以包括第一驱动磁体712和第一驱动线圈714,并且第二驱动器720可以包括第二驱动磁体722和第二驱动线圈724。
89.驱动器700可以设置在基板构件200以及透镜模块400和500中的每一个处。例如,第一驱动磁体712和第二驱动磁体722分别设置在第一透镜模块400和第二透镜模块500上,并且第一驱动线圈714和第二驱动线圈724可以分别设置在第一基板210和第二基板220上。
90.第一驱动器710和第二驱动器720可以基于光轴c设置在不同侧上。例如,第一驱动器710可以设置在壳体100的第二侧表面104上,并且第二驱动器720可以设置在壳体100的第三侧表面105上。
91.第一驱动器710和第二驱动器720可配置成具有不同的驱动位移。例如,形成在第一基板210上的第一驱动线圈714的数量(基于图1为5个)或第一驱动线圈714的形成区域dw1可以大于第二驱动线圈724的数量(基于图1为3个)或第二驱动线圈724的形成区域dw2。因此,第一透镜模块400通过第一驱动器710在光轴c方向上的位移可以大于第二透镜模块500通过第二驱动器720在光轴c方向上的位移。
92.如图2所示,如上所述配置的相机模块10可以配置成薄型且小型化的形式,以便容易地安装在便携式终端上。
93.根据当前一个或多个实施方式,相机模块10可以配置成改善第一透镜模块400和第二透镜模块500的可驱动性和驱动可靠性。例如,相机模块10可以配置成最小化当第一透镜模块400和第二透镜模块500被驱动时产生的摩擦力和摩擦噪声。此外,相机模块10可以配置成使得第一透镜模块400和第二透镜模块500的驱动方向被恒定地保持。
94.参照图3a和图4c描述用于实现上述效果的相机模块10的结构。首先,参照图3a至图3e描述壳体100和第一透镜模块400之间的接触结构。
95.相机模块10可以包括用于平滑第一透镜模块400在光轴方向上的移动的引导件。引导件可以设置在壳体100上,并配置成能够驱动(理想地是直线运动)第一透镜模块400。在一个或多个实施方式中,引导件可以是设置在壳体100和第一透镜模块400之间的球支承件352或棒状构件354中的一个或球支承件和棒状构件的组合。
96.作为示例,如图3a所示,壳体100和第一透镜模块400可以配置成经由设置在底部部分102的引导凹槽160和第一透镜模块400的引导凹槽460之间的球支承件352彼此接触。在该配置中,由于壳体100和第一透镜模块400与球支承件352点接触,所以当第一透镜模块400被驱动时产生的摩擦力和摩擦噪声可以被最小化。
97.作为另一示例,壳体100和第一透镜模块400可以配置成经由一体地形成在底部部分102上的棒状构件354相互接触,如图3b所示。棒状构件354可以形成为沿着光轴c方向伸长,并且可以与第一透镜模块400的引导凹槽460线接触。在这种形式中,由于第一透镜模块400的移动方向被限制为棒状构件354的延伸方向(即,光轴c方向),所以第一透镜模块400的驱动方向可以被恒定地保持。
98.作为另一示例,壳体100和第一透镜模块400可以配置成经由一体地形成在底部部分102上的多个棒状构件354和356以及球支承件352相互接触,如图3c所示。两个棒状构件354和356在光轴c方向上延伸,并在与光轴相交的方向上以预定间隔设置。球支承件352可以设置在两个棒状构件354和356之间。
99.在这种形式中,棒状构件354和356以及球支承件352可以具有预定的尺寸关系。例如,棒状构件354和356的直径rd1和rd2可以小于球支承件352的直径bd。然而,棒状构件354和356的直径rd1和rd2不必小于球支承件352的直径bd。例如,球支承件352的直径bd可以在不引起第一透镜模块400的底表面与棒状构件354和356之间接触的范围内减小。作为另一示例,棒状构件354的中心和棒状构件356的中心之间的距离g可以形成为小于球支承件352的直径bd。同时,当棒状构件354的中心与棒状构件356的中心之间的距离g大于球支承件352的直径bd时,球支承件352可能不与棒状构件354和356接触,并且因此,必须满足上述条件。
100.在如上所述配置的形式中,第一透镜模块400的驱动摩擦力和驱动噪声可以通过球支承件352减小,同时第一透镜模块400的驱动方向通过多个棒状构件354和356恒定地保持。
101.作为另一示例,壳体100和第一透镜模块400可以配置成以图3b和图3c的混合形式相互接触,如图3d所示。详细地,壳体100的部分和第一透镜模块400的部分可以以图3b的形式彼此接触,并且壳体100的另一部分和第一透镜模块400的另一部分可以以图3c的形式彼此接触。这种形式可以呈现出根据图3b和图3c的所有优点。作为参考,在当前一个或多个实施方式中,棒状构件358的直径rd3可以大于棒状构件354和356的直径rd1和rd2以及球支承件352的直径bd。
102.同时,相机模块10还可以包括用于保持壳体100和第一透镜模块400之间的恒定距离的部件。例如,磁性材料180和480可以分别设置在壳体100的底部部分102和第一透镜模块400上,如图3e所示。磁性材料180和480可以配置成使得吸引力起作用。例如,磁性材料180和480中的一个可以配置成永磁体的形式。根据这种形式,第一透镜模块400可以通过形成在磁性材料180和480之间的吸引力稳定地安置在壳体100的底部部分102上,而不会从壳体100脱离。
103.接下来,参考图4a至图4c描述第一透镜模块400和第二透镜模块500之间的接触结构。
104.第一透镜模块400和第二透镜模块500可以配置成通过球支承件和棒状构件中的
至少一个彼此接触。
105.作为示例,第一透镜模块400和第二透镜模块500可以配置成经由设置在支承部分450的引导凹槽452和第二透镜模块500的引导凹槽560之间的球支承件350彼此接触,如图4a所示。在这种配置中,由于第一透镜模块400和第二透镜模块500始终与球支承件350点接触,所以当驱动第二透镜模块500时产生的摩擦力和摩擦噪声可以被最小化。
106.作为另一示例,第一透镜模块400和第二透镜模块500可以配置成经由一体形成在支承部分450上的棒状构件351彼此接触,如图4b所示。棒状构件351可以形成为沿着光轴c方向伸长,并且可以与第二透镜模块500的引导凹槽560线接触。在这种形式中,由于第二透镜模块500的移动方向被限制为棒状构件351的延伸方向(即,光轴c方向),所以第二透镜模块500的驱动方向可以被恒定地保持。
107.作为另一示例,第一透镜模块400和第二透镜模块500可以配置成经由多个棒状构件351和球支承件350彼此接触。两个棒状构件351可在光轴c方向上延伸,并在与光轴相交的方向上以预定间隔设置。球支承件350可以设置在两个棒状构件351之间。
108.在这种形式中,第二透镜模块500的驱动摩擦力和驱动噪声可以通过球支承件350减小,同时第二透镜模块500的恒定驱动方向通过多个棒状构件351恒定地保持。
109.相机模块10还可以包括用于保持壳体100和第二透镜模块500之间的恒定距离的部件。例如,磁性材料182和580可以分别设置在壳体100的底部部分102和第二透镜模块500上,如图4c所示。磁性材料182和580可以配置成具有吸引力。例如,磁性材料182和580中的一个可以配置成永磁体的形式。根据这种形式,第二透镜模块500可以通过形成在磁性材料182和580之间的吸引力稳定地安置在壳体100的底部部分102上,而不会从壳体100脱离。作为参考,磁性材料182可以与前述磁性材料180一体地形成。
110.根据当前一个或多个实施方式,相机模块10可以配置成能够进行自动对焦和变焦。例如,相机模块10可以通过整体驱动第一透镜模块400和第二透镜模块500来执行自动对焦。作为另一示例,相机模块10可以通过以不同的尺寸移动第一透镜模块400和第二透镜模块500来执行变焦。在下文中,参照图5a至图5c描述相机模块的具体操作示例。
111.相机模块10可以配置成能够进行自动对焦。例如,可以通过将第一透镜模块400和第二透镜模块500从图5a所示的状态移动到图5b所示的状态来调整相机模块10的焦点。第一透镜模块400和第二透镜模块500的移动位移x1可以根据相机模块10和对象之间的距离而变化。
112.在相机模块10的自动对焦期间,第一透镜模块400和第二透镜模块500可以由第一驱动器710驱动。详细地说,第一透镜模块400可以通过在设置于第一透镜模块400中的第一驱动磁体712和设置于壳体100的一侧上的第一驱动线圈714之间产生的驱动力在光轴c方向上移动。相反,第二透镜模块500可以在没有单独驱动力的情况下移动。例如,第二透镜模块500可以在由第一透镜模块400的支承部分450支承的同时与第一透镜模块400一起整体移动。因此,即使在相机模块10的自动对焦期间,第一透镜模块400的光轴和第二透镜模块500的光轴也可以被恒定地保持。
113.相机模块10可以配置成能够进行变焦。例如,可以通过将第一透镜模块400和第二透镜模块500从图5a所示的状态移动到图5c所示的状态来执行相机模块10的变焦。第一透镜模块400和第二透镜模块500的移动位移x1和x2可以根据相机模块10和对象之间的距离
而变化。
114.当执行相机模块10的变焦时,第一透镜模块400和第二透镜模块500可以由第一驱动器710和第二驱动器720顺序驱动。详细地说,第一透镜模块400和第二透镜模块500可以通过第一驱动器710整体移动。此后,当确定第一透镜模块400的移动位置时,第二透镜模块500可以通过第二驱动器720在第一透镜模块400的支承部分450上移动预定尺寸。
115.当执行相机模块10的变焦时,第一透镜模块400和第二透镜模块500可以移动不同的尺寸。例如,第一透镜模块400可以由第一驱动器710移动预定位移x1,并且第二透镜模块500可以移动由第一驱动器710移动的位移x1和由第二驱动器720直接移动的位移x2之和。
116.如上所述,第一透镜模块400和第二透镜模块500的驱动形式可以提高相机模块10的驱动可靠性。例如,在相机模块10中,根据当前一个或多个实施方式,第二透镜模块500在第一透镜模块400的支承部分450上移动,并且因此,第一透镜模块400和第二透镜模块500可以容易地对准。作为另一示例,在相机模块10中,根据该一个或多个实施方式,第二透镜模块500的具有相对大的位移的驱动通过第一驱动器710和第二驱动器720分开,并且因此,可以最小化在通过单个驱动器执行驱动时可能引起的驱动偏差。
117.根据当前一个或多个实施方式,相机模块可以根据需要修改成其它形状。
118.作为示例,相机模块10a还可以包括第三透镜模块600,如图6所示。第三透镜模块600可以设置在第一透镜模块400的前面(物侧)。然而,第三透镜模块600的位置不限于第一透镜模块400的前面。第三透镜模块600可以配置成不在壳体100的内部空间中移动。详细地说,与第一透镜模块400和第二透镜模块500不同,第三透镜模块600可以不在光轴c方向上驱动。然而,第三透镜模块600的位置不必是固定的。例如,相机模块10a还可以包括用于在光轴c方向上驱动第三透镜模块600的单独驱动器。
119.如上所述配置的相机模块10a可以改善多个透镜模块400、500和600的对焦能力的变化。
120.作为另一示例,相机模块10b还可以包括如图7和图8所示的光路转换器300。光路转换器300可以设置在第一透镜模块400的前面(物侧)。然而,光路转换器300的位置不限于第一透镜模块400的前面。例如,光路转换器300可以设置在第二透镜模块500的后面(成像面侧)。光路转换器300可以在第二光轴c2方向上反射或折射在第一光轴c1方向上入射的光。
121.在如上所述配置的相机模块10b中,由于多个透镜模块400和500可以在与入射光(即,第一光轴c1)相交的方向上布置,因此相机模块10b可以容易地安装在薄型移动终端中。
122.接下来,参考图9至图13描述根据一个或多个实施方式的相机模块的另一示例。
123.根据当前一个或多个实施方式的相机模块12可以包括壳体100、第一透镜模块400、第二透镜模块500和第三透镜模块600。然而,相机模块12的部件不限于此。例如,相机模块12还可以包括基板构件200(210和220)和驱动器700(710、720和730)。作为另一示例,相机模块12还可以包括设置在第一透镜模块400、第二透镜模块500和第三透镜模块600的成像侧的图像传感器(未示出)
124.壳体100通常可以形成为矩形平行六面体形状。然而,壳体100的形状不限于矩形平行六面体。壳体100可配置成使得除一个表面之外的其它部分是敞开的。例如,壳体100可
以形成为除了底部部分102之外所有四个侧表面103、104、105和106以及上部部分是敞开的。壳体100的一些敞开的侧表面103和106可以用作光的通道。例如,壳体100的第一侧表面103可以用作光入射通过的路径,并且第四侧表面106可以用作光发射通过的路径。壳体100的其它敞开的侧表面104和105可用作基板构件200(210和220)的布置空间。例如,第一基板210可以设置在壳体100的第二侧表面104上,并且第二基板220可以设置在壳体100的第三侧表面105上。
125.壳体100可以配置成容纳第一透镜模块400至第三透镜模块600。例如,在壳体100的内部空间110中,第一透镜模块400至第三透镜模块600可以在壳体100的纵向方向上并排布置。壳体100的内部空间110可以形成为具有相当大的尺寸。例如,壳体100的内部空间110可以形成为允许驱动第一透镜模块400至第三透镜模块600的尺寸。
126.基板构件200可配置成多个。例如,基板构件200可以包括第一基板210和第二基板220。然而,基板构件200不必包括多个基板。例如,基板构件200可以设置成使得第一基板210和第二基板220彼此连接。基板构件200可以配置成软或硬的形式。基板构件200可以配置成容纳驱动器700的一些部件。驱动器700的一部分,例如,驱动线圈714和724,可以分别设置在第一基板210和第二基板220上。
127.第一透镜模块400可以设置在壳体100的内部空间110中,并且可以配置成在壳体100的内部空间110中沿着光轴c移动。详细地说,第一透镜模块400可以配置成在壳体100的底部部分102上沿光轴c移动。
128.第一透镜模块400可以配置成折射入射光。例如,第一透镜模块400可以包括第一透镜组lg1。第一透镜组lg1可以包括具有正屈光力或负屈光力的一个或多个透镜。例如,第一透镜组lg1可以包括具有正屈光力的透镜和具有负屈光力的透镜。然而,构成第一透镜组lg1的透镜的数量和类型不限于上述形式。例如,第一透镜组lg1可以包括具有正屈光力或负屈光力的单个透镜。
129.第二透镜模块500可以设置在壳体100的内部空间110中,并且可以配置成在壳体100的内部空间110内沿着光轴c移动。详细地说,第二透镜模块500可以配置成在壳体100的底部部分102上沿光轴c移动。
130.第二透镜模块500可以配置成折射入射光。例如,第二透镜模块500可以包括第二透镜组lg2。第二透镜组lg2可以包括具有正屈光力或负屈光力的一个或多个透镜。例如,第二透镜组lg2可以包括具有正屈光力的透镜和具有负屈光力的透镜。然而,构成第二透镜组lg2的透镜的数量和类型不限于上述形式。例如,第二透镜组lg2可以包括具有正屈光力或负屈光力的单个透镜。
131.第二透镜模块500可以配置成支承第一透镜模块400和第三透镜模块600。例如,可以在第二透镜模块500的一侧上形成其上可以设置第一透镜模块400的第一支承部分540,并且可以在第二透镜模块500的另一侧上形成其上可以设置第三透镜模块600的第二支承部分560。
132.第一支承部分540可以配置成支承第一透镜模块400的底表面。例如,第一支承部分540可配置成从第二透镜模块500的两侧向前延伸,以支承第一透镜模块400的左底表面和右底表面。第一支承部分540可以形成为具有显著的长度。例如,第一支承部分540的长度sl1可以等于或大于第一透镜模块400的长度m1l和第一透镜模块400的驱动位移xm1之和
(m1l+xm1)。
133.用于便于驱动第一透镜模块400的单元可以形成或设置在第一支承部分540上。例如,第一引导凹槽542可以沿着光轴c方向形成在第一支承部分540中,并且球支承件340可以设置在第一引导凹槽542中。因此,第一透镜模块400可经由设置在第一引导凹槽542中的球支承件340在第一支承部分540上快速且平滑地移动。
134.第二支承部分560可以配置成支承第三透镜模块600的底表面。例如,第二支承部分560可以配置成从第二透镜模块500的两侧向后延伸,以支承第三透镜模块600的左底表面和右底表面。第二支承部分560可以形成为具有显著的长度。例如,第二支承部分560的长度sl2可以大于第三透镜模块600的长度m3l。作为另一示例,第二支承部分560的长度sl2可以等于或大于第三透镜模块600的长度m3l和第三透镜模块600的驱动位移xm3之和(m3l+xm3)。
135.用于便于驱动第三透镜模块600的装置可以形成或设置在第二支承部分560上。例如,第二引导凹槽562可以沿着光轴c方向形成在第二支承部分560中,并且球支承件350可以设置在第二引导凹槽562中。因此,第三透镜模块600可经由设置在第二引导凹槽562中的球支承件350在第二支承部分560上快速且平滑地移动。
136.第三透镜模块600可以配置成利用入射通过第一透镜模块400和第二透镜模块500的光在图像传感器或成像面上形成图像。第三透镜模块600可以包括第三透镜组lg3。第三透镜组lg3可以包括具有正屈光力或负屈光力的一个或多个透镜。例如,第三透镜组lg3可以包括具有正屈光力的透镜和具有负屈光力的透镜。然而,构成第三透镜组lg3的透镜的数量和类型不限于上述形式。例如,第三透镜组lg3可以包括具有正屈光力或负屈光力的单个透镜。
137.第一透镜模块400和第三透镜模块600可以配置成在第二透镜模块500上被驱动,如图11所示。例如,第一透镜模块400可以经由设置在第一引导凹槽542和引导凹槽432之间的球支承件340在第一支承部分540上在光轴c方向上移动,并且第三透镜模块600可以通过设置在第二引导凹槽562和引导凹槽632之间的球支承件350在第二支承部分560上在光轴c方向上移动。引导凹槽432、542、562和632可形成为稳定地接触球支承件340和350。例如,引导凹槽432、542、562和632可以具有三角形截面形状以在至少两个点上接触球支承件340和350。然而,引导凹槽432、542、562和632的截面形状不限于三角形。例如,其中容纳有球支承件340和350的第一引导凹槽542和第二引导凹槽562的截面可以形成为四边形形状。
138.驱动器700可以配置成驱动第一透镜模块400至第三透镜模块600。例如,第一驱动器710可以配置成驱动第一透镜模块400,第二驱动器720可以配置成驱动第二透镜模块500,以及第三驱动器730可以配置成驱动第三透镜模块600。驱动器700可以包括驱动磁体和驱动线圈。例如,第一驱动器710包括第一驱动磁体712和第一驱动线圈714,第二驱动器720可以包括第二驱动磁体722和第二驱动线圈724,以及第三驱动器730可以包括第三驱动磁体732和第三驱动线圈734。
139.驱动器700可以设置在基板构件200和透镜模块400、500、600中的每一个上。例如,第一驱动磁体712至第三驱动磁体732可以分别设置在第一透镜模块400至第三透镜模块600中,第一驱动线圈714和第三驱动线圈734可以设置在第二基板220上,以及第二驱动线圈724可以设置在第一基板210上。
140.第一驱动器710和第三驱动器730可以基于光轴c设置在与第二驱动器720不同的侧表面上。例如,第一驱动器710和第三驱动器730可以设置在壳体100的第三侧表面105上,以及第二驱动器720可以设置在壳体100的第二侧表面104上。
141.第一驱动器710至第三驱动器730可以配置成具有不同的驱动位移。例如,形成在第一基板210上的第二驱动线圈724的数量(图9中为5个)可以大于形成在第二基板220上的第一驱动线圈714的数量(图9中为2个)以及形成在第二基板220上的第三驱动线圈734的数量(图9中为3个)。作为另一示例,形成在第一基板210上的第二驱动线圈724的形成区域dw2可以大于形成在第二基板220上的第一驱动线圈714的形成区域dw1和形成在第二基板220上的第三驱动线圈734的形成区域dw3。
142.如图10所示,如上所述配置的相机模块12可以配置成薄型且小型化的形式,以便容易地安装在便携式终端上。
143.接下来,参照图12a至图12e描述壳体100中的第二透镜模块500的驱动结构。
144.第二透镜模块500可以通过球支承件和棒状构件中的至少一个在壳体100上被驱动。
145.作为示例,如图12a所示,壳体100和第二透镜模块500可以经由设置在底部部分102的引导凹槽160和第二透镜模块500的引导凹槽510之间的球支承件352彼此接触。由于壳体100和第二透镜模块500始终与球支承件352点接触,所以可以最小化当驱动第二透镜模块500时产生的摩擦力和摩擦噪声。
146.作为另一示例,壳体100和第二透镜模块500可以配置成经由一体形成在底部部分102上的棒状构件354彼此接触,如图12b所示。棒状构件354可以形成为沿着光轴c方向伸长,并且可以与第二透镜模块500的引导凹槽510线接触。在这种形式中,由于第二透镜模块500的移动方向被限制为棒状构件354的延伸方向(即,光轴c方向),所以第二透镜模块500的驱动方向可以被恒定地保持。
147.作为另一示例,壳体100和第二透镜模块500可以配置成经由一体地形成在底部部分102上的多个棒状构件354和356以及球支承件352彼此接触,如图12c所示。两个棒状构件354和356在光轴c方向上延伸,并在与光轴相交的方向上以预定间隔设置。球支承件352可以设置在两个棒状构件354和356之间。
148.在这种形式中,棒状构件354和356以及球支承件352可以具有预定的尺寸关系。例如,棒状构件354和356的直径rd1和rd2可以小于球支承件352的直径bd。然而,棒状构件354和356的直径rd1和rd2不必小于球支承件352的直径bd。例如,球支承件352的直径bd可以在不引起第二透镜模块500的底表面与棒状构件354和356之间接触的范围内减小。作为另一示例,棒状构件354的中心和棒状构件356的中心之间的距离g可以形成为小于球支承件352的直径bd。同时,当棒状构件354的中心与棒状构件356的中心之间的距离g大于球支承件352的直径bd时,球支承件352可能不与棒状构件354和356接触,并且因此,必须满足上述条件。
149.在如上所述配置的形式中,第二透镜模块500的驱动摩擦力和驱动噪声可以通过球支承件352减小,同时第二透镜模块500的驱动方向通过多个棒状构件354和356恒定地保持。
150.作为另一示例,壳体100和第二透镜模块500可以配置成以图12b和图12c的混合形
式彼此接触,如图12d所示。详细地,壳体100的部分和第二透镜模块500的部分可以以图12b的形式彼此接触,并且壳体100的另一部分和第二透镜模块500的另一部分可以以图12c的形式彼此接触。这种形式可以呈现出根据图12b和图12c的所有优点。作为参考,在当前一个或多个实施方式中,棒状构件358的直径rd3可以大于棒状构件354和356的直径rd1和rd2以及球支承件352的直径bd。
151.同时,相机模块12还可以包括用于保持壳体100和第二透镜模块500之间的恒定距离的部件。例如,磁性材料180和580可以分别设置在壳体100的底部部分102和第二透镜模块500上,如图12e所示。磁性材料180和580可以配置成使得吸引力起作用。例如,磁性材料180和580中的一个可以配置成永磁体的形式。根据这种形式,第二透镜模块500可以通过形成在磁性材料180和580之间的吸引力稳定地安置在壳体100的底部部分102上,而不会从壳体100脱离。
152.根据当前一个或多个实施方式,相机模块12可以以其它形式修改。例如,相机模块12还可以包括光路转换器300,如图13所示。同时,尽管图13所示的形式包括一个光路转换器300,但是如果需要的话,相机模块12还可以包括设置在第三透镜模块600后面的光路转换器。
153.接下来,参考图14a至图25描述根据一个或多个实施方式的相机模块的另一示例。作为参考,应当预先注意,与当前一个或多个实施方式相关的部件可以被描述为不同于根据上述一个或多个实施方式的附图标记,而不管部件是否与上述一个或多个实施方式的部件相同。
154.根据当前一个或多个实施方式,相机模块14可以包括壳体100、基板模块200、光路转换模块300以及透镜模块400、500和600。然而,相机模块14的部件不限于此。例如,相机模块14还可以包括驱动器700、光轴对准器800和屏蔽构件900。
155.壳体100可以配置成容纳光路转换模块300和透镜模块400、500和600。例如,壳体100可以通过底部部分102和多个侧部部分103、104、105和106形成容纳光路转换模块300和透镜模块400、500和600的内部空间。
156.壳体100可以形成为便于驱动器700的布置。例如,可以在壳体100的侧部部分104和105中形成开口110、130和140,使得可以设置驱动器700的一些部件(驱动线圈)。
157.用于抑制光路转换模块300脱离的单元可以设置在壳体100中。例如,配置成抑制光路转换模块300脱离的磁体构件760可以设置在壳体100的底部部分102。磁体构件760可通过形成在底部部分102处的开口160向光路转换模块300的磁轭施加吸引力。用于保持光路转换模块300的静止状态的磁性材料(未示出)可以远离磁体构件760设置在壳体100的前部部分103上。磁性材料可以通过与光路转换模块300的驱动器或磁轭相互作用而恒定地保持光路转换模块300的位置。
158.壳体100可以包括用于将折射通过透镜模块400、500和600的光投射到图像传感器模块(未示出)的部件。例如,光可以穿过的窗口190可以形成在壳体100的后部部分106。作为参考,尽管在图14a中未示出,但是可以在窗口190上设置用于阻挡特定波长的光的滤光器构件。例如,滤光器构件可配置成阻挡红外线。然而,被滤光器构件阻挡的波长不限于红外线。
159.壳体100可以包括用于便于透镜模块400、500和600在一个方向上的移动的部件。
例如,用于布置摩擦减小器的凹槽180可以形成在壳体100的底部部分102。摩擦减小器可配置成减小壳体100与透镜模块400、500和600之间的摩擦阻力。例如,摩擦减小器可以配置成球支承件的形式。然而,摩擦减小器的形式不限于球支承件。
160.壳体100可以包括用于保持光路转换模块300与透镜模块400、500和600之间的恒定距离的部件。例如,支承构件152和154可以形成在壳体100内。支承构件152和154可以设置在光路转换模块300和透镜模块400、500和600之间,并且保持光路转换模块300和透镜模块400、500和600之间的恒定距离。
161.基板模块200可以设置在壳体100中。例如,基板模块200可以设置成围绕壳体100的底部部分102的开口160以及侧表面部分104和105。然而,基板模块200的布置不限于此。
162.基板模块200可包括多个基板。例如,基板模块200可以包括第一基板210、第二基板220和第三基板230。然而,构成基板模块200的基板的数量不限于三个。
163.第一基板210可以设置在壳体100的侧表面部分104上。例如,第一基板210可以设置成封闭侧表面部分104的开口130。驱动器700的一些部件可以设置在第一基板210上。例如,驱动器700的驱动线圈714、724和734可以设置在第一基板210上。然而,设置在第一基板210上的部件不限于驱动线圈714、724和734。例如,无源元件、检测传感器280等可以进一步设置在第一基板210上。第一基板210可以配置成连接到其它电子部件或其它部件。例如,第一基板210可以设置在壳体100的侧表面部分104上,并延伸到侧表面部分104的外部。
164.第二基板220可以设置在壳体100的侧表面部分105上。例如,第二基板220可以设置成封闭侧表面部分105的开口140。驱动器700的一些部件可以设置在第二基板220上。例如,驱动器700的驱动线圈714、724和744可以设置在第二基板220上。然而,设置在第二基板220上的部件不限于驱动线圈714、724和744。例如,驱动ic 212、无源元件、检测传感器290等可以进一步设置在第二基板220上。第二基板220可以配置成连接到其它电子部件或其它部件。例如,第二基板220可以设置在壳体100的侧表面部分105上,并延伸到侧表面部分105的外部。
165.第三基板230可以设置在壳体100的底部部分102上。例如,第三基板230可以设置成封闭底部部分102的开口160。支承光路转换模块300所必需的部件可以设置在第三基板230上。例如,磁体构件760可以设置在第三基板230上。磁体构件760可产生将光路转换模块300吸引到壳体100的内部的磁力。作为参考,根据当前一个或多个实施方式,磁体构件760可以改变为磁性材料等。
166.第一基板210至第三基板230可以配置成可弯曲的。例如,第一基板210至第三基板230可以配置成柔性基板的形式。第一基板210至第三基板230可以一体地形成。例如,第一基板210至第三基板230可以连接为一个而不断开。
167.基板模块200可以包括将设置在第一基板210至第三基板230上的电子部件连接到图像传感器模块或外部设备的部件。例如,基板模块200可以包括连接端子260。连接端子260可以形成在第一基板210和第二基板220中的至少一个上。
168.光路转换模块300可以配置成转换入射到相机模块14上的光的路径。例如,光路转换模块300可以配置成在第二光轴c2方向上折射或反射沿着第一光轴c1入射的光的路径。光路转换模块300可以设置在壳体100中。例如,光路转换模块300可以设置在前部部分103和支承构件152之间的空间中。
169.光路转换模块300可以配置成实现图像稳定。例如,光路转换模块300可以由第一驱动器710(712和714)和第二驱动器720(722和724)旋转。作为参考,参考图16再次描述光路转换模块300的具体配置。
170.透镜模块400、500和600可以配置成多个。例如,透镜模块400、500和600可以包括第一透镜模块400、第二透镜模块500和第三透镜模块600。然而,透镜模块的数量不限于三个。
171.透镜模块400、500和600配置成利用入射到相机模块14上的光在图像传感器模块上形成图像。例如,透镜模块400、500和600可以包括具有屈光力的一个或多个透镜。
172.透镜模块400、500和600可以配置成可在第二光轴c2的方向上移动。例如,第一透镜模块400至第三透镜模块600中的一个或多个可以在第二光轴c2方向上移动,以使相机模块14能够进行自动对焦(af)或变焦。然而,不是所有的第一透镜模块400至第三透镜模块600都配置成可在第二光轴c2方向上移动。例如,第一透镜模块400可以配置成保持恒定的位置,而不管相机模块14的自动对焦和变焦操作。
173.第二透镜模块500和第三透镜模块600可以通过第三驱动器730和第四驱动器740沿着第二光轴c2方向移动。例如,第二透镜模块500可以由第三驱动器730(732和734)驱动,并且第三透镜模块600可以由第四驱动器740(742和744)驱动。第二透镜模块500和第三透镜模块600可以以不同的尺寸被驱动。例如,其中第二透镜模块500可在第二光轴c2方向上移动的位移幅度可以不同于其中第三透镜模块600可在第二光轴c2方向上移动的位移幅度。
174.第二透镜模块500和第三透镜模块600可以配置成在预定区段中一起移动。例如,第三透镜模块600可以配置成安装在第二透镜模块500上,并且当第二透镜模块500被驱动时,第三透镜模块600可以在第二光轴c2方向上移动。
175.第三透镜模块600可以在第二透镜模块500上被驱动。例如,第三透镜模块600可以通过第四驱动器740在第二透镜模块500上在第二光轴c2方向上移动。不管第二透镜模块500的驱动如何,都可以执行第三透镜模块600的驱动。例如,可以独立地驱动第三透镜模块600,而不管第二透镜模块500的驱动状态或驱动方向。
176.驱动器700可以配置成驱动光路转换模块300和透镜模块400、500和600。例如,第一驱动器710和第二驱动器720可以驱动光路转换模块300,并且第三驱动器730和第四驱动器740可以驱动第二透镜模块500和第三透镜模块600。
177.驱动器700可以包括驱动磁体和驱动线圈。例如,第一驱动器710可以包括第一驱动磁体712和第一驱动线圈714,第二驱动器720可以包括第二驱动磁体722和第二驱动线圈724,第三驱动器730可以包括第三驱动磁体732和第三驱动线圈734,以及第四驱动器740可以包括第四驱动磁体742和第四驱动线圈744。
178.光轴对准器800可以配置成实现第一透镜模块400至第三透镜模块600的光轴对准。例如,光轴对准器800可以配置成同时与第一透镜模块400至第三透镜模块600接触,以使第一透镜模块400至第三透镜模块600的光轴彼此匹配。光轴对准器800可以包括在第二光轴c2方向上延伸的一个或多个光轴对准构件810和820。例如,光轴对准器800可以包括第一光轴对准构件810和第二光轴对准构件820。
179.第一光轴对准构件810和第二光轴对准构件820可配置成棒状形状。然而,第一光
轴对准构件810和第二光轴对准构件820的形状不限于棒。例如,第一光轴对准构件810和第二光轴对准构件820可以转变成雕刻在壳体100的底部部分102上的凹槽形状或者浮雕在底部部分102上的突起形状。
180.第一光轴对准构件810和第二光轴对准构件820可配置成具有不同的长度。例如,第一光轴对准构件810可以形成为比第二光轴对准构件820长。详细地,第一光轴对准构件810可形成为具有对应于第一透镜模块400至第三透镜模块600的驱动位移的长度,并且第二光轴对准构件820可形成为具有对应于第二透镜模块500和第三透镜模块600的驱动位移的长度。上述形式可简化第一透镜模块400与光轴对准构件810和820之间具有相对小的移动位移的接触结构。详细地,根据上述形式,第一透镜模块400可以与第一光轴对准构件810接触,并且不与第二光轴对准构件820接触。然而,第一光轴对准构件810和第二光轴对准构件820的长度不必不同。
181.第一光轴对准构件810和第二光轴对准构件820可以一体地形成在壳体100中。例如,第一光轴对准构件810和第二光轴对准构件820可以通过插入注射模制或双注射模制而一体地形成在壳体100中。因此,与第一光轴对准构件810和第二光轴对准构件820接触的第一透镜模块400至第三透镜模块600可以布置成始终与壳体100的中心轴相匹配。作为另一示例,第一光轴对准构件810和第二光轴对准构件820中的每一个的一部分可以配置成通过壳体100的底部部分102而暴露。例如,第一光轴对准构件810和第二光轴对准构件820中的每一个的一部分可以配置成嵌入壳体100的底部部分102中,而其他剩余部分可配置成暴露到底部部分102的外部。
182.第一光轴对准构件810和第二光轴对准构件820可以配置成接触第一透镜模块400至第三透镜模块600。例如,第一光轴对准构件810可以配置成直接或间接地接触第一透镜模块400至第三透镜模块600。同样,第二光轴对准构件820可以配置成直接或间接地接触第二透镜模块500和第三透镜模块600。
183.第一光轴对准构件810和第二光轴对准构件820可以配置成使其与第一透镜模块400至第三透镜模块600之间的接触摩擦最小化。例如,第一光轴对准构件810和第二光轴对准构件820可配置成与第一透镜模块400至第三透镜模块600线接触或点接触。作为具体示例,第一光轴对准构件810可以配置成与第一透镜模块400线接触,并且第一光轴对准构件810和第二光轴对准构件820可以配置成与第二透镜模块500和第三透镜模块600点接触。作为参考,参照图20至图22再次描述第一光轴对准构件810和第二光轴对准构件820与第一透镜模块400至第三透镜模块600之间的具体接触形式。
184.屏蔽构件900可以配置成封闭壳体100的敞开空间。例如,屏蔽构件900可以配置成覆盖壳体100的敞开的上部部分。屏蔽构件900可以配置成保护基板模块200、设置在壳体100中的光路转换模块300和第一透镜模块400至第三透镜模块600。作为示例,屏蔽构件900由金属或其它抗冲击材料形成,并且因此屏蔽构件900可保护基板模块200、光路转换模块300和第一透镜模块400至第三透镜模块600免受外部冲击。作为另一示例,屏蔽构件900可以由不允许电磁波通过其传输的材料形成,从而保护基板模块200、光路转换模块300和第一透镜模块400至第三透镜模块600免受外部电磁波的影响。屏蔽构件900可配置成允许光进入。例如,光进入窗口910可以形成在屏蔽构件900的一侧上。光进入窗口910可以形成在与光路转换模块300的第一光轴c1相匹配的位置中。
185.在下文中,参考图15和图16描述光路转换模块。
186.光路转换模块300配置成转换光路。例如,光路转换模块300可以在第二光轴c2方向上折射或反射沿着第一光轴c1入射的光的路径。
187.如图15所示,光路转换模块300可以包括可移动构件310、光路转换构件320和支承构件340。然而,光路转换模块300的部件不限于上述构件。例如,光路转换模块300还可以包括球支承件350、352、360和362、磁体构件370、固定构件380等。
188.可移动构件310可以配置成容纳光路转换构件320。例如,可以安装光路转换构件320的安装部分312可以形成在可移动构件310的一侧上。可移动构件310可以配置成容纳驱动器700的一些部件。例如,可以设置第一驱动磁体712和第二驱动磁体72的容纳部分314可以形成在可移动构件310的两侧上。可以在可移动构件310的后表面上形成多个凹部315、316和317。球支承件350和352可以分别设置在第一凹部315和第二凹部316中,并且磁轭或磁体构件370可以设置在第三凹部317中。第一凹部315和第二凹部316可配置成使球支承件350和352平滑地旋转或滚动。例如,第一凹部315可形成为大致四棱锥形状,并且第二凹部316可形成为截头六棱锥形状。然而,第一凹部315和第二凹部316的形状不限于四棱锥和截头六棱锥。
189.支承构件340可以支承可移动构件310以使得可移动构件310能够进行第一旋转运动。例如,支承构件340可以经由球支承件350和352支承可移动构件310。支承构件340可以设置成能够相对于壳体100的前部部分103进行第二旋转运动。例如,支承构件340可以经由球支承件360和362设置在壳体100的前部部分103上。用于容纳球支承件360和362的凹部345和346可以形成在支承构件340的一个表面上。第一凹部345和第二凹部346可配置成使球支承件360和362平滑地旋转或滚动。例如,第一凹部345可以形成为大致截头六棱锥形状,并且第二凹部346可以形成为四棱锥形状。然而,第一凹部345和第二凹部346的形状不限于截头六棱锥和四棱锥。
190.开口347可以形成在支承构件340中。开口347可向外暴露设置在可移动构件310上的磁体构件370,以实现磁体构件370和设置在壳体100的前部部分103上的磁轭构件之间的相互作用(吸引力)。在磁体构件370和磁轭构件之间产生的吸引力减轻了光路转换模块300与壳体100分离或光路转换模块300在壳体100中的位置改变的现象。
191.如上所述配置的光路转换模块300可以配置成执行图像稳定功能。作为示例,光路转换模块300可以通过第一驱动器710绕第一旋转轴(p1:连接球支承件350和352的中心的虚拟线)旋转,以执行根据一个或多个实施方式的图像稳定功能。作为另一示例,光路转换模块300可以通过第二驱动器720绕第二旋转轴(p2:连接球支承件360和362的中心的虚拟线)旋转,以执行根据一个或多个实施方式的图像稳定功能。
192.在下文中,参考图17至图18b描述第一透镜模块至第三透镜模块。
193.第一透镜模块400至第三透镜模块600可以沿着第二光轴c2方向顺序设置。例如,第一透镜模块400可以设置在最前方(物侧),第二透镜模块500可以设置在第一透镜模块400和第三透镜模块600之间,并且第三透镜模块600可以设置在最后方(图像传感器侧)。
194.第一透镜模块400至第三透镜模块600可以配置成包括一个或多个透镜。例如,第一透镜模块400可以配置成包括一个或两个或更多个透镜,第二透镜模块500可以配置成包括两个或三个或更多个透镜,并且第三透镜模块600可以配置成包括两个或更多个透镜。然
而,构成第一透镜模块400至第三透镜模块600的透镜的数量不限于此。
195.第一透镜模块400至第三透镜模块600可以布置成使得它们的光轴通过光轴对准器800:810和820彼此匹配。例如,第一透镜模块400可以配置成通过第一光轴对准构件810在位置上对准,并且第二透镜模块500和第三透镜模块600可以配置成通过第一光轴对准构件和第二光轴对准构件820在光轴上对准。
196.如上所述,第一透镜模块400可以设置在最前面,并且可以配置成通常不移动。然而,第一透镜模块400不总是保持在静止状态。例如,如果需要,可以在第二光轴c2方向上驱动第一透镜模块400。第一透镜模块400可以配置成通过第一光轴对准构件810在位置上对准。例如,第一透镜模块400的位置可以通过与第一光轴对准构件810接触而对准。
197.第一透镜模块400可以配置成与第一光轴对准构件810线接触。例如,可以在第一透镜模块400中形成具有三角形截面形状的引导凹槽460,以与具有球形截面的第一光轴对准构件810线接触。引导凹槽460可以在第二光轴c2方向上延伸,并且可以在至少两个点上与第一光轴对准构件810线接触。
198.第二透镜模块500可以配置成容纳驱动器700的一些部件。例如,第二透镜模块500可以配置成容纳第三驱动磁体732。第三驱动磁体732可以设置在第二透镜模块500的一侧。例如,第三驱动磁体732可以设置在形成在第二透镜模块500的一侧上的容纳部分510中。
199.第二透镜模块500可以包括缓冲器520和磁轭构件530。缓冲器520和磁轭构件530可以顺序地设置在第二透镜模块500的容纳部分510中。缓冲器520可包括支承板522和缓冲构件524。
200.支承板522可以以过盈配合的形式联接到容纳部分510。例如,支承板522可以通过弯曲部分522a牢固地固定到容纳部分510的内部,弯曲部分522a被弯曲以便与容纳部分510的上部部分和下部部分接触。支承板522可以为缓冲构件524提供布置空间。例如,其中可设置缓冲构件524的弯曲部分522a可形成在支承板522的前面和后面。支承板522可配置成轻量的。例如,可以在支承板522中形成多个孔。作为参考,尽管在图18a所示的支承板522中形成8个孔,但是也可以在不降低支承板522的刚性的范围内另外形成孔。
201.缓冲构件524可以形成在支承板522的弯曲部分522b和522c中的每个中。缓冲构件524形成为朝向第一透镜模块400和第三透镜模块600中的每一个突出,并吸收第二透镜模块500和第一透镜模块400之间的冲击以及第二透镜模块500和第三透镜模块600之间的冲击。缓冲构件524可以由易于吸收冲击的材料形成。例如,缓冲构件524可以由诸如橡胶的材料形成。然而,缓冲构件524的材料不限于橡胶。
202.磁轭构件530可以设置在容纳部分510中。磁轭构件530可以配置成具有与第三驱动磁体732基本相同的截面区域。
203.第二透镜模块500可以配置成支承第三透镜模块600。例如,第二透镜模块500可以包括支承第三透镜模块600的支承部分540。支承部分540可以在第二光轴c2方向上延伸。支承部分540可以具有能够使第三透镜模块600线性运动的部件。例如,支承部分540可以包括在第二光轴c2方向上延伸的引导凹槽542。用于平滑驱动第三透镜模块600的球支承件546可以设置在引导凹槽542中。球支承件546可以设置在第二透镜模块500和第三透镜模块600之间。详细地说,球支承件546可以设置在第二透镜模块500的引导凹槽542和第三透镜模块600的引导凹槽642之间。
204.第二透镜模块500可以配置成可沿第二光轴c2方向驱动。例如,第二透镜模块500可以通过在第三驱动磁体732和第三驱动线圈734之间产生的驱动力沿着第二光轴c2移动。
205.相机模块14可以包括能够使第二透镜模块500进行光轴对准和线性运动的部件。例如,第二透镜模块500可以包括平行于第二光轴c2延伸的第一引导凹槽560和第二引导凹槽570。第一引导凹槽560和第二引导凹槽570可以分别形成在第一支承部分540a和第二支承部分540b的底表面上。例如,第一引导凹槽560可以形成在第一支承部分540a处,并且第二引导凹槽570可以形成在第二支承部分540b处。用于平滑驱动第二透镜模块500的球支承件562和572可以分别设置在第一引导凹槽560和第二引导凹槽570中。
206.第二透镜模块500可以设置成与第一透镜模块400的光轴相匹配。例如,第二透镜模块500可以经由与第一光轴对准构件810和第二光轴对准构件820中的每一个点接触的球支承件562对准以匹配第一透镜模块400的光轴。详细地说,由于球支承件562总是在两个点处与第一引导凹槽560以及光轴对准构件810和820点接触,因此第二透镜模块500相对于光轴对准构件810和820的位置可以被恒定地保持。
207.第二透镜模块500可以配置成在与壳体100的底部部分102最小接触的状态下移动。例如,通过设置在第二引导凹槽570和底部部分102的凹槽180之间的球支承件572,即使在壳体100内没有大的驱动力,第二透镜模块5000也可以自由地移动。
208.第二透镜模块500可以包括用于保持与壳体100的恒定距离的部件。例如,第二透镜模块500的底表面可以包括配置成与壳体100的磁性材料182相互作用的磁性材料580(参考图22)。磁性材料580与壳体100的磁性材料182形成吸引力,以减小第二透镜模块500与壳体100分离的现象。
209.第三透镜模块600可以配置成容纳驱动器700的一些部件。例如,第四驱动磁体742可以设置在形成在第三透镜模块600的一侧上的容纳部分610中。第三透镜模块600的容纳部分610可以形成为基于第二光轴c2基本上面对第二透镜模块500的容纳部分510。例如,第三透镜模块600的容纳部分610和第二透镜模块500的容纳部分510可以形成在相对于第二光轴c2基本对称的位置。作为另一示例,第二透镜模块500的容纳部分510可以从第二透镜模块500的第一侧表面朝向第三透镜模块600的第一侧表面或图像传感器侧延伸,并且第三透镜模块600的容纳部分610可以从第三透镜模块600的第二侧表面朝向第二透镜模块500的第二侧表面或物侧延伸。
210.容纳部分510和610的长度(在第二光轴c2的方向上)可以形成为具有与透镜模块500和600的驱动位移基本成比例的尺寸。例如,容纳部分510可以形成为具有与第二透镜模块500的驱动位移成比例的尺寸(长度),并且容纳部分610可以形成为具有与第三透镜模块600的驱动位移成比例的尺寸(长度)。然而,容纳部分510和610的长度不必与透镜模块500和600的驱动位移成比例。例如,容纳部分510可以形成为具有小于第二透镜模块500的驱动位移的长度。容纳部分510和610可以形成为不与其它相邻构件干涉。例如,容纳部分510可以形成为延伸到第三透镜模块600的端部,以便不与设置在第三透镜模块600后面的图像传感器(未示出)干涉,并且容纳部分610可以形成为延伸到第二透镜模块500的前端,以便不与设置在第二透镜模块500前面的第一透镜模块400干涉。
211.在包括上述形式的容纳部分510和610的相机模块14中,驱动器700可以分布地设置在透镜模块500和600的左边侧向空间和右边侧向空间中,并且因此,相机模块14的尺寸
和厚度可以减小,并且相机模块14在光轴方向上的长度可以减小。
212.第三透镜模块600可以包括缓冲器620和磁轭构件630。缓冲器620和磁轭构件630可以顺序地设置在第三透镜模块600的容纳部分610中。缓冲器620可包括支承板622和缓冲构件624。
213.支承板622可以以过盈配合的形式联接到容纳部分610。例如,支承板622可以通过被弯曲以便与容纳部分610的上部部分和下部部分接触的弯曲部分622a牢固地固定到容纳部分610的内部。
214.支承板622可以为缓冲构件624提供布置空间。例如,其中可以设置缓冲构件624的弯曲部分622a可以形成在支承板622的前面和后面。支承板622可配置成轻量的。例如,可以在支承板622中形成多个孔。作为参考,尽管在图18a所示的支承板622中形成8个孔,但是可以在不降低支承板622的刚性的范围内形成另外的孔。
215.缓冲构件624可以设置在支承板622的弯曲部分622b处。设置在弯曲部分622b处的缓冲构件624可以朝向第二透镜模块500突出,以吸收第三透镜模块600和第二透镜模块500之间的冲击。缓冲构件624可以由易于吸收冲击的材料形成。例如,缓冲构件624可以由诸如橡胶的材料形成。然而,缓冲构件624的材料不限于橡胶。
216.磁轭构件630可以设置在容纳部分610中。磁轭构件630可以配置成具有与第四驱动磁体742基本相同的截面区域。
217.第三透镜模块600可以通过第四驱动器740在第二光轴c2方向上移动。例如,第三透镜模块600可以通过在第四驱动磁体742和第四驱动线圈744之间形成的驱动力在第二光轴c2方向上移动。
218.第三透镜模块600可以配置成可在第二透镜模块500上移动。例如,第三透镜模块600可以设置在第二透镜模块500的支承部分540上,并且在与壳体100的底部部分102不接触的状态下移动。第三透镜模块600可以配置成在第二透镜模块500上滚动。例如,第三透镜模块600可以经由设置在引导凹槽542和642中的球支承件546在第二透镜模块500上滚动。第三透镜模块600可以设置成与第二透镜模块500的光轴相匹配。例如,第三透镜模块600在第二透镜模块500上的位置可以通过与引导凹槽542和642点接触的多个球支承件546对准。
219.第三透镜模块600可以包括用于保持与壳体100的恒定距离的部件。例如,第三透镜模块600可以在其底表面上包括配置成与壳体100的磁性材料184相互作用的磁性材料680(参考图22)。磁性材料680与壳体100的磁性材料184形成吸引力,以减小第三透镜模块600与壳体100分离的现象。第三透镜模块600的磁性材料680可以具有与第二透镜模块500的磁性材料580不同的尺寸。例如,第三透镜模块600的磁性材料680可以形成为小于第二透镜模块500的磁性材料580。作为另一示例,磁性材料680在第二光轴c2方向上的长度可以小于磁性材料580在第二光轴c2方向上的长度(参考图18b)。因此,在第二透镜模块500和壳体100之间产生的吸引力可以大于在第三透镜模块600和壳体100之间产生的吸引力。上述条件可以减小当第二透镜模块500与第三透镜模块600被整体驱动时可能引起的抖动。此外,上述条件可以稳定地保持第二透镜模块500的静止状态,从而最小化或限制当第三透镜模块600被独立地驱动时可能引起的第二透镜模块500的抖动或第二透镜模块500的位置变化。
220.如上所述配置的第一透镜模块400至第三透镜模块600可以顺序地设置在光路转
换模块300的后面,如图19所示。此外,第一透镜模块400至第三透镜模块600可以选择性地在第二光轴c2方向上移动,以执行相机模块14的自动对焦和/或变焦。
221.在下文中,参照图20至图22描述壳体与第一透镜模块至第三透镜模块之间的联接结构和对准结构。
222.首先,参照图20描述壳体与第一透镜模块之间的联接结构和对准结构。
223.第一透镜模块400可以设置成保持在距壳体100的底表面的第一高度h1处。理想地,第一透镜模块400可以设置成使得从容纳在第一透镜模块400中的透镜402的中心lc1到壳体100的底表面的高度hcl保持恒定。
224.第一透镜模块400相对于壳体100的位置可以通过第一光轴对准构件810对准。例如,第一透镜模块400相对于壳体100的位置可以通过与第一光轴对准构件810的圆周表面在两个点处线接触的引导凹槽460来固定或对准。
225.参照图21a至图21b描述壳体与第二透镜模块之间的联接结构和对准结构。
226.如图21a所示,第二透镜模块500可以设置成保持在距壳体100的底表面的第二高度h2处。理想地,第二透镜模块500可以设置成使得从容纳在第二透镜模块500中的透镜502的中心lc2到壳体100的底表面的高度hc2保持恒定。第二透镜模块500可以设置成与第一透镜模块400的光轴相匹配。例如,高度hc2和高度hcl可以在公差范围内具有相同的尺寸。
227.第二透镜模块500相对于壳体100的位置可以通过第一光轴对准构件810和第二光轴对准构件820对准。例如,第二透镜模块500相对于壳体100的位置可以通过与第一光轴对准构件810和第二光轴对准构件820中的每一个点接触的球支承件562来对准。
228.第二透镜模块500可以配置成相对于壳体100平滑地移动。例如,由于第二透镜模块500不直接接触壳体100的底部部分,而是与设置在壳体100的凹槽180中的球支承件572点接触,并且因此,由与壳体100的底部部分接触引起的摩擦阻力和噪声可以被最小化。
229.如图21b所示,第二透镜模块500和壳体100的对准也可以通过多个球支承件562和第一光轴对准构件810之间的接触结构来实现。这里,在安装在容纳构件5622中的状态下,多个球支承件562可以固定到第二透镜模块500。这种形式对于使第二透镜模块500和相机模块14小型化是有利的。
230.在下文中,参照图22描述壳体和第三透镜模块的联接结构和对准结构。
231.如图22所示,第三透镜模块600可以设置成保持在距壳体100的底表面的第三高度h3处。理想地,第三透镜模块600可以设置成使得从容纳在第三透镜模块600中的透镜602的中心lc3到壳体100的底表面的高度hc3保持恒定。第三透镜模块600可以设置成与第一透镜模块400和第二透镜模块500的光轴相匹配。例如,高度hc3可以为在公差范围内与前述高度hc1和高度hc2相同的尺寸。
232.第三透镜模块600相对于壳体100的位置可以配置成由第二透镜模块500对准。例如,第三透镜模块600相对于第二透镜模块500的位置可以通过设置成与引导凹槽542和642点接触的球支承件546对准,并且第三透镜模块600的位置可以通过第二透镜模块500对准。因此,根据当前一个或多个实施方式,第二透镜模块500和第三透镜模块600的位置可以通过第二透镜模块500相对于壳体100的位置对准同时对准。
233.同时,在相机模块14中,根据当前一个或多个实施方式,示出了多个光轴对准构件810和820布置在壳体100的底部部分,并且引导凹槽和/或球支承件布置在第一透镜模块
400和第二透镜模块500中,但是一个或多个光轴对准构件可以形成在第一透镜模块400和第二透镜模块500中,并且引导凹槽或球支承件可以布置在壳体100的底部部分。
234.图23至图25是示出图19所示的相机模块的操作状态的视图。
235.根据当前一个或多个实施方式,相机模块14可以配置成能够进行自动对焦(af)和/或变焦。作为示例,相机模块14可以通过在图23所示的状态下非常轻微地移动第一透镜模块400至第三透镜模块600中的一个或多个来执行自动对焦(af)。作为另一示例,相机模块14可以通过将第二透镜模块500和第三透镜模块600移动预定尺寸来执行变焦,如图24和图25所示。
236.根据当前一个或多个实施方式,相机模块14可以配置成能够快速移动第二透镜模块500和第三透镜模块600。例如,由于根据当前一个或多个实施方式的相机模块14是这样一种结构,其中在如图24和图25所示移动第二透镜模块500和第三透镜模块600之后,移动第三透镜模块600,因此,可以最小化由以大位移移动第三透镜模块600而引起的驱动误差。
237.此外,根据当前一个或多个实施方式,相机模块14可以配置成能够精确移动第二透镜模块500和第三透镜模块600。例如,如图24和图25所示,根据当前一个或多个实施方式的相机模块14具有这样的结构,其中第三透镜模块600的最终位移由第二透镜模块500的位移m1和第三透镜模块600的位移m2之和形成,并且因此,可以最小化可能由以大位移移动一个透镜模块而引起的驱动误差(非线性驱动)。
238.因此,根据当前一个或多个实施方式,相机模块14不仅可以实现具有高放大率的光学成像系统,而且可以提高具有高放大率的光学成像系统的成像质量。
239.此外,根据当前一个或多个实施方式,在相机模块14中,由于壳体100与第一透镜模块400至第三透镜模块600在最小区域中彼此接触,所以可以最小化当驱动第一透镜模块400至第三透镜模块600时可能出现的噪声,并且可以降低驱动第一透镜模块400至第三透镜模块600所需的功耗。
240.图26是示出根据一个或多个实施方式的便携式设备1000的示例的视图,例如,作为示例,智能电话,其中用户可以使用包括相机模块10、麦克风130和显示器160的智能电话120。
241.作为参考,在根据前述一个或多个实施方式的附图和描述中,第一透镜模块和第二透镜模块的位置通过棒状光轴对准构件对准,但是如果必要,第一透镜模块和第二透镜模块的位置可以通过多个球支承件对准,以代替棒状光轴对准构件。
242.如上所述,在本公开中,由于最小化了透镜模块之间的光轴失配,所以可以最小化由于透镜模块之间的光轴失配而导致的成像质量的劣化。
243.此外,在本公开中,由于确保了透镜模块的线性移动性,可以提高相机模块的驱动可靠性。
244.此外,在本公开中,由于最小化了透镜模块的实质位移,所以可以最小化驱动透镜模块所需的驱动器的配置。
245.虽然本公开具体的示例,但是在理解本技术的公开内容之后将显而易见的是,在不背离权利要求及其等同方案的精神和范围的情况下,可对这些示例作出形式和细节上的各种改变。本文中描述的示例应仅以描述性的意义进行理解,而不是出于限制的目的。每个示例中的特征或方面的描述应理解为可适用于其它示例中的类似特征或方面。如果所描述
的技术以不同的顺序执行,和/或如果所描述的系统、架构、设备或电路中的部件以不同的方式组合和/或由其它部件或其等同物替换或补充,则仍可实现适当的结果。因此,本公开的范围不由具体实施方式限定,而是由权利要求及其等同方案限定,并且在权利要求及其等同方案的范围内的所有变型都应被理解为包括在本公开中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1