用于通过子像素对准使高密度生化阵列成像的方法和系统与流程
用于通过子像素对准使高密度生化阵列成像的方法和系统
1.本技术的直接母案是申请日为2011年10月13日、申请号为202010000698.2、发明名称为“用于通过子像素对准使高密度生化阵列成像的方法和系统”的发明专利申请;本技术的间接母案是申请日为2011年10月13日、申请号为201180051638.2、发明名称为“用于通过子像素对准使高密度生化阵列成像的方法和系统”的发明专利申请。
技术领域
2.本公开一般涉及用于高密度生化阵列的成像系统的领域。
背景技术:
3.高密度生化阵列和相关的机器允许多个生化实验(有时为数十亿)并行进行。这种能力是通过以极小体积进行每次实验并将实验非常紧密地封装在一起的技术发展积累获得的。为了有效地观察实验,需要与其他高技术产业中的小型化进步相似的进步。具体地,需要的是快速、准确、可重复且耐用的用于生化阵列的成像技术。
技术实现要素:
4.根据本发明,用于对高密度生化阵列成像的系统和相关方法包括一个或多个成像通道和相应的一个或多个时间延迟积分型成像相机,其中一个或多个成像通道共用公共的物镜,时间延迟积分型成像相机具有光学对准机构,其允许四个自由度:x、y、旋转和比例中每一个进行独立的通道内和通道间调整。成像通道被配置成独立检查生化阵列中的图像的不同波长。
5.通过参考以下参照附图的详细描述,可以更好地理解本发明。
附图说明
6.图1a为第一多通道生化阵列成像系统的示意图。
7.图1b为第二多通道生化阵列成像系统的示意图。
8.图1c为第三多通道生化阵列成像系统的示意图。
9.图1d为第四多通道生化阵列成像系统的示意图。
10.图2为横向偏移板的示意图。
11.图3示出x和y偏移。
12.图4示出x和y的对准误差。
13.图5为使用时间延迟积分对具有像素阵列的点进行成像的概念图。
14.图6为图5的时间延迟积分成像的结果的概念图。
15.图7示出了在对准前两个相机、载物片和定位台之间的转动对准关系。
16.图8示出了在对准后两个相机、载物片和定位台之间的转动对准关系。
17.图9示出了在载物片对准中使用的参考框。
具体实施方式
18.人类基因组研究和生化阵列的其他用途需要先进的成像系统来实现商业上可行的数据采集率。除其他因素外,每单位时间的可采集数据的生化实验的次数取决于阵列密度和图像获取速度。增加的阵列密度会使图像获取问题复杂化,因为其使得对图像中的每个实验(数以百万计)的特性保持跟踪具有挑战性。
19.对于dna阵列,所需的数据通常为四进制的;核苷酸可为a、c、g或t。这些可能性标有一组四个不同颜色的荧光分子标记。每个荧光标记吸收一定波长的光并发出较长波长的光。多通道成像仪同时采集四种可能波长范围中尽可能多的波长的数据。
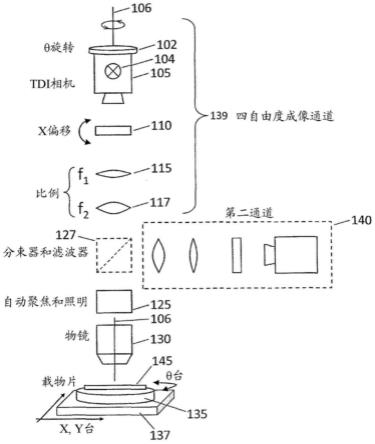
20.图1a至图1d为多通道生化阵列成像系统。这些多通道系统中的每个成像通道对于图像旋转、x和y偏移以及比例(放大率)均都具有其自身独立的调整,在下文中被称为通道内和通道间调整的独立性。图1a示出了双通道系统。图1b和图1c示出了具有调整x和y图像偏移的替代装置的图1a的系统。图1d示出了多个四自由度的成像通道可如何被添加至多通道系统。
21.图1a的系统具有两个同时成像的通道,其中每个通道具有用于图像调整的四个自由度:旋转、x和y偏移以及比例或放大率。高精度定位台扫描显微镜物镜下的载物片,载物片以旋转对称轴表征。
22.在图1a中,常规的时间延迟积分(tdi,time delay integration)式相机105安装在旋转台102上。相机105可根据系统进行的何种操作而以tdi模式或全帧模式操作。横向偏移板110移动相机105中的图像位置。镜筒透镜117和辅助透镜115共同形成变焦透镜系统以聚焦并改变相机105中的图像的尺寸。旋转台102被配置成将tdi相机105绕共同的旋转对称轴线106转动,以使tdi相机105的内部ccd阵列(未示出)相对于样本145定向使得能够沿扫描轴线104(穿过图的平面)适当地对样本145进行扫描。相机105、旋转台102、板110以及由镜筒透镜117和辅助透镜115形成的变焦透镜系统共同形成一个独立成像通道139。第二独立成像通道140包括第二相机、偏移板和变焦透镜系统,第二相机安装在旋转台上。分束器和滤波器组件127将不同波长的光引导至不同的成像通道139、140。在图1a中仅示出了一个分束器/滤波器组件127。然而,在系统的其他实施方式中,额外的分束器和/或滤波器可通过机器人移入或移出机械系统。块125表示自动聚焦和照明系统。所有成像通道共用的显微镜物镜130被聚焦在生化阵列载物片形式的样本145上,生化阵列载物片安装在包括旋转台135和x-y台137的定位台上。
23.由荧光标记的生物分子所发出的光通过显微镜物镜采集并根据波长被聚焦至一个或其他tdi相机中的像素上。具有两个成像通道的系统可同时记录两个波长范围内的图像数据。不同的二色性或多色性分束器和/或滤波器127的替换允许在另外的波长“范围(bin)”内的图像数据被采集。每个成像通道具有其自身的变焦透镜系统以调整图像焦点和放大率。这样的调整例如通常在更换二色性滤波器时进行。每个相机可独立旋转,阵列载物片还可在其x-y定位系统的顶部旋转。
24.变焦系统是非典型的,其提供了受约束且非常有限的放大率(比例)调整范围,但以很高精度和稳定性进行此调整。透镜115和117安装在精密台上(未示出),精密台使透镜115和117以1微米步长沿透镜轴线移动。在示例性的系统中,焦距f1和f2分别为约500mm和165mm,并且其最大比例改变不超过3%。该精密的变焦系统允许标定16x的显微镜的放大率
逐步调整至约0.00009x那么小,并同时保持聚焦。
25.图1b示出了图1a的系统的变型。在图1b中,镜子111取代了图1a的偏移板110。镜子提供了使相机105中的图像偏移的替代装置。出于清楚显示的目的,在图1b中未示出第二成像通道140。
26.图1c示出了图1a和图1b的系统的变型。在图1c中,相机105被安装在x-y定位台103以及旋转台102上。在图1c的系统的通道中既没有包含偏移板(例如图1a中的110),也没有包含偏移镜(例如图1b中的111)。相反地,机械x-y定位台103为相机105提供横向偏移控制。
27.图1d示出了与图1a至图1c所示的那些类似的系统可如何被构造成具有任意数量的成像通道,每个成像通道具有能够彼此独立调整的参数并且每个通道还能够独立于任意其他通道进行调整以使得在一个通道中的调整不影响其他通道。这种通道内和通道间调整的独立性在本文中被称为四自由度成像通道独立性。在图1d中,分束器/滤波器组件128和129将不同波长的光分别引导至成像通道141和142。每个成像通道可包含用于图像旋转、x和y偏移、以及比例或放大率的独立调整。x和y偏移控制可通过倾斜板(例如板110)、镜子(例如镜子111)、时间延迟积分脉冲定时(如下所述)或技术组合来实现。下面将参照图2更详细地描述横向偏移板。
28.图2为横向偏移板110的示意图。板110使相机105中图像的位置移动。在图2中,示出了光束150穿过板110并呈现为光束152。因为光束以非垂直入射的方式穿过板,所以其位置偏移了δx量,δx量由下式给出:
[0029][0030]
其中,t为板的厚度,n为其折射率,θ为入射角度。常见的直径约为2.5cm、厚度约为3.5mm的玻璃板(n~1.5)的重量只有几克并可安装在振镜(galvo)旋转机构上以快速且准确移动。五度的倾斜产生约100μm的偏移。
[0031]
通过在相机105中使用时间延迟积分(tdi)脉冲定时,图像能够以相对于x轴线垂直的方向(即y方向)平移。图3示出了x和y偏移。点205为成像在像素阵列210上的光点。箭头指示该点可相对于像素阵列如何移动。如上所述,x偏移通过振镜和偏移板系统进行调整,而y偏移通过tdi脉冲定时进行调整。在时间延迟积分中,以与从像素读出图像数据的(标定地)相同速率经过像素来扫描相机中的图像。数据读出速率(或扫描速率或两者)的微小改变实际上沿第一轴线平移所记录的图像位置,而振镜控制的偏移板绕第一轴线的角度的微小改变可沿与第一轴线垂直的轴线平移所记录的图像位置。因此,具有可调整的定时的tdi相机与振镜控制的偏移板的组合快速且准确地将由相机记录的图像中的独立的、二维的、横向偏移引入多通道成像系统的成像通道中。此外,引入图像偏移的这种方法不依赖于载物片相对于物镜的移动。
[0032]
上述振镜控制的板和tdi偏移系统对于进行小的校正以将生化阵列的图像与相机中的像素阵列对准是有用的。(控制机制超出了本公开的范围。)图4示出了图像中的点305与像素315的阵列之间的x和y对准误差。在图3中,虚线圆和加号标志310表示像素中心。包括实心圆和加号标志305的符号指示图像中的点的实际位置。“δx”和“δy”示出位置305与
310之间的差。在一个特定的系统中,每个8μm乘8μm的基于相机的像素成像并因此对应于面积为500nm乘500nm的生化阵列。已发现,成像系统例如图1中示出的成像系统能够以比20nm更好的精度与生化阵列保持对准,并同时每秒扫描超过一百万个数据点。
[0033]
在高密度阵列的情况下实现高流通量部分取决于精确的机械扫描台。原则上,图1中示出的x-y台137能够在x-y平面中以任意方向移动。通过x移动和y移动的组合产生对角线移动。然而,实际上,如果一个维度(例如x)固定而发生另一维度(例如y)的移动,台的精度最佳。
[0034]
类似地,当以与读出数据的方向平行的方向进行扫描时,时间延迟积分式相机实现最高的准确度。图5为使用时间延迟积分对具有像素阵列的点进行成像的概念图。未对准导致如图6所示的图像模糊,图6为图5的时间延迟积分的结果的概念图。
[0035]
通过像素阵列415对点405进行成像。点和像素阵列的相对移动由始于点405的虚线箭头示出。箭头没有与像素阵列对准,模糊的图像420是不良的结果。还通过像素阵列415对点410进行成像,但这次点与像素阵列的相对移动由始于点410的虚线箭头示出。该箭头与像素阵列对准因此产生了图像425。
[0036]
定位台和相机时间延迟积分系统的实际限制突出了提供每个相机和具有旋转台的载物片x-y台的效用。图7和图8示出了两个相机、载物片和定位台之间的旋转对准关系。如果这四个部件中的一个部件被认为是固定的,则需要3个旋转自由度以与另三个部件对准。
[0037]
在图7和图8中,x轴线和y轴线505表示台例如图1中的x-y台137的方位。第一成像通道中的相机(例如图1中的相机105)和第二成像通道中的相机的方位分别由510和520表示。载物片例如图1中的载物片145的方位由525表示。在图7中,两个相机、载物片和台均相对于彼此未对准地转动。
[0038]
如图8所示,所有这些部件的对准可通过以下过程实现:将相机510、520与载物片525对准,以及将载物片525与x-y台对准。这个过程的示例为:
[0039]
a.使用一个相机获取载物片上的生化实验阵列的图像。
[0040]
b.使用图像对准程序计算相机与载物片之间的角度θ
相机-载物片
,存储该角度供以后使用。
[0041]
c.使用下面描述的载物片对准过程找出载物片与x-y台之间的角度θ
载物片-台
。
[0042]
d.将载物片转动在步骤(c)中找出的角度以使其与x-y台轴线对准。
[0043]
e.将相机转动在步骤(b)和(c)中找到的角度之和以使其与台对准。
[0044]
f.重复步骤(c)的载物片对准过程以获得新的载物片定位。
[0045]
g.重复步骤(b)和(c)以确认所有的角度等于0。如果不是,则重复整个过程。
[0046]
h.为另一相机重复整个过程。
[0047]
载物片与x-y台的对准如图9所示的那样进行,图9示出了在载物片对准过程中使用的参考框。在图9中,参考框605与x-y台(例如图1中的x-y台137)对准。参考框610与载物片(例如图1中的载物片145)对准。两个参考框可通过旋转台(例如图1中的旋转台135)相对于彼此旋转。为了确定所需的旋转角度(以及偏移与比例关系),在每个参考框中对载物片上的若干点(例如图9中的点“a”和“b”)进行测量。台参考框中的点的位置(x,y)可从发送至台的数字定位命令中已知。载物片参考框中的点的位置(x’,y’)在图像对准过程中确定。如
果在两个参考框中测量了n个点(由i=1至n索引),则对于点i,可被写成:
[0048][0049][0050]
以上展开式已进行至二阶。可使用至更高阶或其他坐标系统中的展开式等而不失一般性。接下来,误差项可被构造为:
[0051][0052]
然后,χ2被最小化以找出系数a
00
、a
10
、a
01
…b00
、b
10
、b
01
…
等。最终,可通过这些系数计算出参考框之间的角度。
[0053]
一旦相机、载物片和台对准,则可开始数据采集。图1的成像系统具有静态和动态图像调整能力。静态调整包括通过变焦透镜系统进行放大、通过一组机械旋转台进行旋转以及通过分束器和滤波选择进行波长选择。静态调整在载物片扫描操作开始之前进行,而动态调整可在扫描操作过程中进行。
[0054]
动态调整包括通过tdi脉冲定时和透明平板(例如110)的振镜驱动旋转、镜子(例如111)的旋转或台(例如103)的平移进行的小的x和y偏移改变。动态调整可形成基于图像的控制循环的一部分,该控制循环校正扫描操作过程中的定位误差。控制循环包括采集相机中的图像、时钟输出来自相机的图像数据、分析数据、计算误差校正以及通过tdi脉冲定时和振镜板角度调整x和y偏移。
[0055]
通过本文所公开的实施方式,本领域技术人员将容易理解,可根据本发明利用目前现存或以后将被开发的执行与本文所述的相应实施方式基本相同的功能或实现与本文所述的相应实施方式基本相同的结果的过程、机械、制造、装置、方法或步骤。因此,所附的权利要求旨在包括落入其范围内的过程、机械、制造、装置、方法或步骤。
[0056]
以上对示出的系统和方法的实施方式的描述并不是全面的或旨在将系统和方法限制于所公开的具体形式。虽然出于说明的目的示出了本文所述的系统和方法的特定实施方式和示例,但是本领域技术人员能够理解,在系统和方法的范围内进行各种等同修改也是可能的。本文提供的系统和方法的教导可应用于其他系统和方法,而不仅用于上述的系统和方法。
[0057]
在所附的权利要求中,所使用的用语不应被理解为将系统和方法限制于说明书和权利要求中公开的特定实施方式,而应被理解为包括在权利要求下运行的所有系统。因此,本发明并不由公开内容限制,除非权利要求中有所指示。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1