一种用于光引擎封装的阵列透镜耦合设备及方法与流程
本发明涉及一种阵列透镜耦合设备及方法,尤其涉及一种用于光引擎封装的阵列透镜耦合设备及方法。
背景技术:
1、近年来,得益于我国重点发展人工智能、远程医疗以及工业互联网等新兴产业,云计算和数据中心产业不断发展,同时,大力推动5g网络建设,这对高速率传输光模块产生了极大的需求,包括200g、400g,以及在研的800g、1.6t光模块。现阶段传输速率在400g以下的光模块发射端有三种方案:eml(electro-absorption laser,电吸收调制激光器)方案、soimodulator chip(silicon on insulator modulator chip,硅光调制器芯片)方案和lnoi(lithium niobate on insulator,薄膜铌酸锂调制器)方案。
2、由于薄膜铌酸锂调制器具有带宽高、半波电压低、尺寸小等诸多优势,故使用薄膜铌酸锂调制器芯片的光模块方案成为业界研究热点。然而,该方案的光引擎封装对耦合设备要求较高,也因此成为制约该类型模块量产的主要因素。传统耦合方案是将fa(fiberarray,光纤阵列)与调制器出光波导口进行直接端面耦合。但是该方案下,fa内部模斑转换会引入额外熔接插损,且调制器芯片模斑大小变化会直接影响耦合效率。本专利方案通过使用透镜阵列,可有效解决调制器芯片与fa之间的模场适配问题,提升耦合效率及耦合容差;同时定制自动耦合设备,可完成透镜阵列的全自动识别、拾取、耦合、点胶及在线固化,实现光引擎高集成度耦合封装工艺要求。
技术实现思路
1、发明目的:本发明目的是提供一种用于光引擎封装的阵列透镜耦合设备及方法,提升光引擎封装的生产效率及耦合精度的同时,增加耦合效率及耦合容差和可返工性。
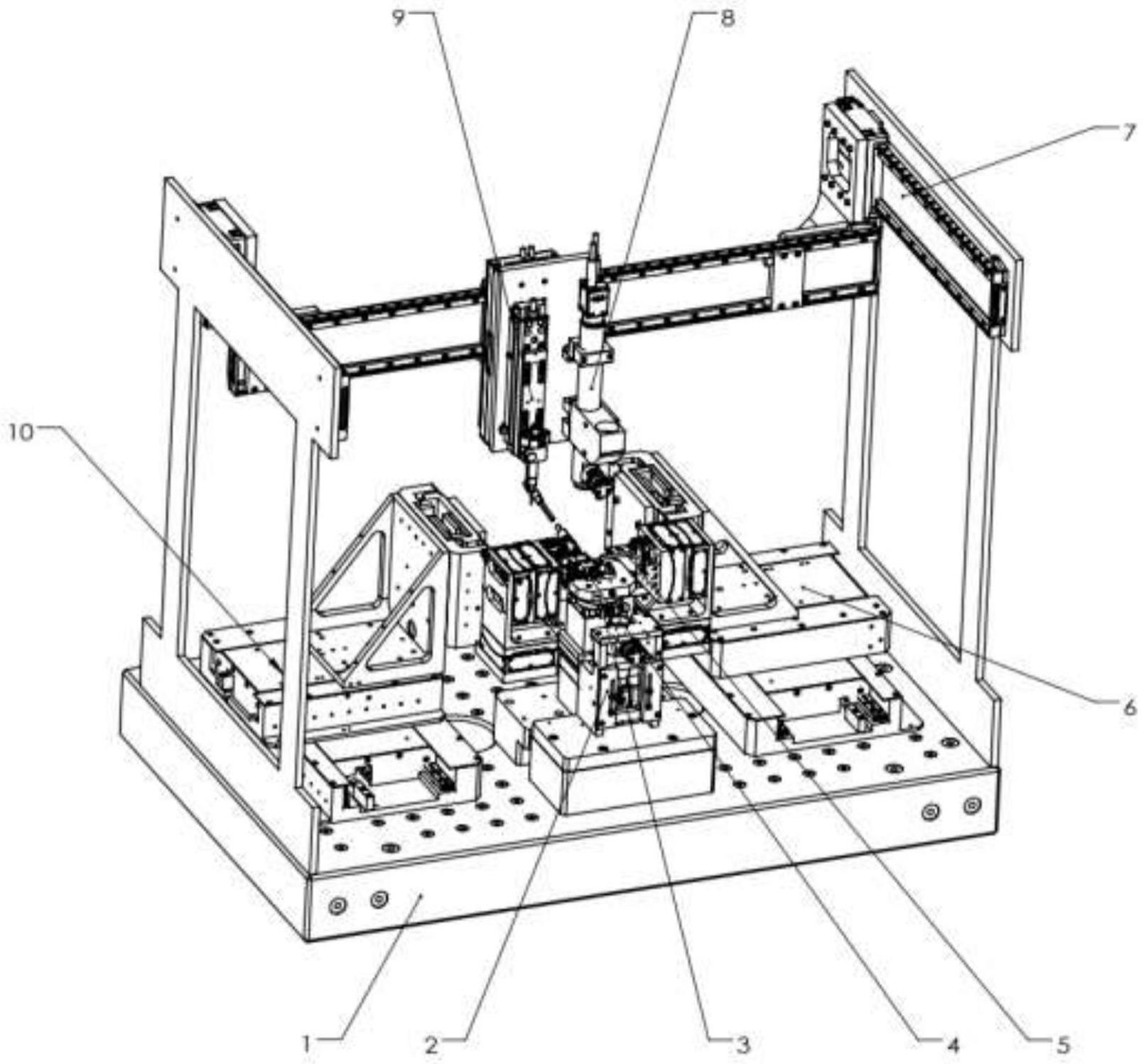
2、技术方案:本发明包括底部平台,所述底部平台顶部相向的两侧分别安装有运动机构耦合台,其中一侧的运动机构耦合台上安装有阵列透镜夹取机构,另一侧的运动机构耦合台上安装有收光fa固定机构,所述底部平台顶部还安装有耦合工作台和多个图像识别系统,所述耦合工作台用于放置待进行阵列透镜耦合的调制器光引擎。
3、所述阵列透镜夹取机构包括马达安装支架,所述马达安装支架安装在运动机构耦合台上,所述马达安装支架顶部安装有第一压力传感器,底部安装有马达,所述马达的运动部件及马达安装支架上均安装有夹爪。
4、所述收光fa固定机构包括收光fa支架转接板,所述收光fa支架转接板安装在运动机构耦合台上,收光fa支架转接板上安装有第二压力传感器和收光fa,所述收光fa的尾部光纤连接光功率计,收光fa前端面接收来自调制器光引擎调制后经阵列透镜汇聚后的光。
5、所述耦合工作台顶部设有产品耦合台,所述产品耦合台上设有调制器光引擎、侧边反射镜和端面反射镜。
6、所述的运动机构耦合台选用直线电机六轴耦合台。
7、所述的图像识别系统包括底部相机识别系统和顶部相机识别系统,所述底部相机识别系统安装在底部平台上,所述顶部相机识别系统安装在龙门架运动系统上,所述龙门架运动系统安装在底部平台上,该龙门架运动系统上还安装有点胶机构。
8、所述调制器光引擎包括光引擎基板,所述光引擎基板上设有调制器,所述调制器上设有多个波导口,所述阵列透镜上阵列有多个透镜,所述收光fa上集成有多根光纤,多个波导口、多个透镜和多根光纤一一对应形成多路光路。
9、一种用于光引擎封装的阵列透镜耦合方法,包括以下步骤:
10、s1、将调制器光引擎放置在产品耦合台上;
11、s2、通过顶部相机识别系统对调制器的所有出光波导口、阵列透镜的位置及角度进行自动图像识别;
12、s3、阵列透镜夹取机构根据识别的位置及角度夹取阵列透镜至底部相机识别系统上方,底部相机对阵列透镜底部进行角度识别,并将阵列透镜沿rz方向调平;
13、s4、将上述阵列透镜依次移动至侧边反射镜光路位置及端面反射镜光路位置,利用顶部相机识别系统依次识别阵列透镜的侧面角度和端面角度,并将阵列透镜依次沿rx、ry方向调平;
14、s5、将阵列透镜移动至调制器前端经理论计算的耦合位置,并使其底部在该耦合位置向下触底光引擎基板,获取阵列透镜相对于光引擎在z方向的基准参考位置,之后,将阵列透镜继续向前移动,使其接触调制器出光波导口端面,获取阵列透镜相对于调制器出光波导口端面在y方向的基准参考位置;
15、s6、驱动收光fa固定机构,使收光fa移动至阵列透镜前端经理论计算的耦合位置,并使其底部在该耦合位置向下触底光引擎基板,获取fa相对于光引擎在z方向的基准参考位置;
16、s7、激光器加电,根据调制器读数调制芯片,并依次使位于最外侧的光路的出光功率最大,每次都以光功率计读数作为反馈信号,驱动阵列透镜在多个方向进行扫描耦合,使功率计收光功率最大,分别记录该位置坐标(p1x,p1y,p1z)和(p2x,p2y,p2z);
17、s8、通过(p1x,p1y,p1z)和(p2x,p2y,p2z)计算出透镜在ry,rz方向上的偏移角度,公式如下,并反向旋转ry、rz轴平衡误差:
18、
19、
20、s9、重复步骤s7~s8,直至计算出的ry和rz的误差值均小于0.1度;
21、s10、根据调制器读数调制芯片,依次使每路出光功率最大,以光功率计读数作为反馈信号,带动收光fa沿多个方向进行扫描耦合,并记录每路光路的光功率及当第一路光路出关功率最大时对应的最终耦合位置p3对应的所有电机的位置坐标;
22、s11、移走阵列透镜,将点胶机构移动至阵列透镜耦合功率最大的位置p3,并在该区域进行点胶;
23、s12、将阵列透镜移动至位置p3,重复s7-s8,使阵列透镜最终处于最外侧的两个透镜耦合角度平衡后功率最大的位置,并对阵列透镜进行固化;
24、s13、将阵列透镜夹取机构和收光fa固定机构移动至安全位置,取下完成阵列透镜耦合的调制器光引擎,耦合结束。
25、有益效果:本发明的耦合方式采用开模平凸透镜阵列,实现光引擎中单模光纤阵列(模场直径10um)与多通道调制器芯片阵列(模场直径4um)之间的模场匹配,无需光纤内模场转换,有效提升耦合效率及耦合容差;同时,阵列透镜的耦合封装过程均采用自动图像识别对位,自动快速耦合,有效提升了耦合精度及耦合效率。
技术特征:
1.一种用于光引擎封装的阵列透镜耦合设备,其特征在于,包括底部平台,所述底部平台顶部相向的两侧分别安装有运动机构耦合台,其中一侧的运动机构耦合台上安装有阵列透镜夹取机构,另一侧的运动机构耦合台上安装有收光fa固定机构,所述底部平台顶部还安装有耦合工作台和多个图像识别系统,所述耦合工作台用于放置待进行阵列透镜耦合的调制器光引擎。
2.根据权利要求1所述的一种用于光引擎封装的阵列透镜耦合设备,其特征在于,所述阵列透镜夹取机构包括马达安装支架,所述马达安装支架安装在运动机构耦合台上,所述马达安装支架顶部安装有第一压力传感器,底部安装有压电陶瓷马达,所述马达的运动部件及马达安装支架上均安装有夹爪。
3.根据权利要求2所述的一种用于光引擎封装的阵列透镜耦合设备,其特征在于,所述收光fa固定机构包括收光fa支架转接板,所述收光fa支架转接板安装在运动机构耦合台上,收光fa支架转接板上安装有第二压力传感器和收光fa,所述收光fa的尾部光纤连接光功率计,收光fa前端面接收来自调制器光引擎调制后经阵列透镜汇聚后的光。
4.根据权利要求3所述的一种用于光引擎封装的阵列透镜耦合设备,其特征在于,所述耦合工作台顶部设有产品耦合台,所述产品耦合台上设有调制器光引擎、侧边反射镜和端面反射镜。
5.根据权利要求3所述的一种用于光引擎封装的阵列透镜耦合设备,其特征在于,所述的运动机构耦合台选用直线电机六轴耦合台。
6.根据权利要求4所述的一种用于光引擎封装的阵列透镜耦合设备,其特征在于,所述的图像识别系统包括底部相机识别系统和顶部相机识别系统,所述底部相机识别系统安装在底部平台上,所述顶部相机识别系统安装在龙门架运动系统上,所述龙门架运动系统安装在底部平台上,该龙门架运动系统上还安装有点胶机构。
7.根据权利要求4所述的一种用于光引擎封装的阵列透镜耦合设备,其特征在于,所述调制器光引擎包括光引擎基板,所述光引擎基板上设有调制器,所述调制器上设有多个波导口,所述阵列透镜上阵列有多个透镜,所述收光fa上集成有多根光纤,多个波导口、多个透镜和多根光纤一一对应形成多路光路。
8.基于权利要求1~7任一项所述的一种用于光引擎封装的阵列透镜耦合方法,其特征在于,包括以下步骤:
技术总结
本发明公开了一种用于光引擎封装的阵列透镜耦合设备及方法,包括底部平台,所述底部平台顶部相向的两侧分别安装有运动机构耦合台,其中一侧的运动机构耦合台上安装有阵列透镜夹取机构,另一侧的运动机构耦合台上安装有收光FA固定机构,所述底部平台顶部还安装有耦合工作台和多个图像识别系统,所述耦合工作台用于放置待进行阵列透镜耦合的调制器光引擎。本发明的耦合方式采用开模平凸透镜阵列,实现光引擎中单模光纤阵列与多通道调制器芯片阵列之间的模场匹配,无需光纤内模场转换,有效提升耦合效率及耦合容差;同时,阵列透镜的耦合封装过程均采用自动图像识别对位,自动快速耦合,有效提升了耦合精度及耦合效率。
技术研发人员:高睿成,颜扬捷,张欢
受保护的技术使用者:江苏铌奥光电科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!