车载摄像头的图像矫正光学透镜制作方法与流程
1.本发明涉及光学、电子技术和机械制造技术领域,特别涉及车载摄像头的图像矫正光学透镜制作方法。
背景技术:
2.车载电子后视镜,在通常情况下,摄像头存在图像畸变现象,也就是成像画面出现一定程度的弯曲现象,特别是使用广角镜头时,图像弯曲现象比较明显,由图像中心向四周逐渐变大,即图像畸变。存在问题是摄像头的光学透镜放大倍数为固定值,放大倍数随着光束和主轴间所成角度的变化,根据光学成像原理,就会产生图像畸变,这是光学透镜的物理特性,其生成的直接原因是由镜头的边缘部分和中心部分的放大倍率不一样导致。在下列发明专利中,均有图像畸变矫正或者补偿技术,cn202011412713.0车载鱼眼摄像头畸变矫正方法、装置、设备及存储介质;cn201910435044.x基于b样条曲面拟合的摄像头畸变矫正方法、系统及介质;cn201510514238.0一种精确校正超广角摄像头图像畸变的方法;cn201820856836.5一种图像畸变小的汽车全景摄像头镜头;cn201810403187.8图像畸变校正方法及装置、计算机可读介质、电子设备;cn201510977380.9增强现实集成成像3d显示图像畸变的消除方法。但是,均采用对称结构,或者是透镜设计利用旋转结构,这样对于矩形窗口的cmos图像传感器而言,没有从根本上解决长
×
宽矩形放大倍数比例问题,还需要进一步发明创造才能实现。通常广角设备拍摄的图像,其中间部分越靠近成像圈中心,放大率就越大,顶部和底部离中心越远,放大率就越小,形成了图像畸变。在现有技术中,很多摄像设备采用软件矫正图像方法,针对广角透镜和大视场角透镜,采用软件对图像进行运算,实现图像畸变矫正,但是,由于软件运算和图像信息的存储,占用很多时间,严重影响电子后视镜的延时,因此,软件方法矫正图像畸变方法存在延时的技术难题。
技术实现要素:
3.本发明提供具有图像矫正功能的光学透镜制作方法,实现光学透镜矫正图像畸变,节省软件矫正图像畸变的时间,提高的电子后视镜cms,减小系统延时,保证电子后视镜的实时特性,同时也节省软件编程和运算时间。
4.本发明的目的至少通过如下技术方案之一实现。
5.车载摄像头的图像矫正光学透镜制作方法,包括以下步骤:
6.s1、预构建上下结构的光学凸透镜、水平结构的光学凸透镜以及对角线结构的光学凸透镜;
7.s2、构建基础摄像头以及标准图像,并在标准图像中标注基准点和标准点;
8.s3、根据基础摄像头构建基于上下结构的光学凸透镜的第一矫正摄像头、基于水平结构的光学凸透镜的第二矫正摄像头和基于对角线结构的光学凸透镜的第三矫正摄像头;
9.s4、根据标准图像调整上下结构的光学凸透镜、水平结构的光学凸透镜和对角线
结构的光学凸透镜的参数;
10.s5、根据步骤s4得到的上下结构的光学凸透镜、水平结构的光学凸透镜和对角线结构的光学凸透镜的参数,生成第一曲面混合组成光学透镜,得到矫正光学摄像头;
11.s6、构建前移放大基础摄像头,将基础摄像头替换为前移放大基础摄像头,重复步骤s3~s5,生成第二曲面混合组成光学透镜,得到前移放大光学摄像头。
12.进一步地,步骤s1中,设置直角坐标系,原点为o点,设置o点和a0点的连线为y轴;
13.设置点b1、c1、d1和e1,点o、a0、b1、c1、d1和e1位于同一平面,且点o和e1的连线垂直于y轴,点o、a0、b1、c1、d1和e1顺次连接围成第一截面,第一截面以y轴为中心旋转360度,得到上下结构的光学凸透镜;
14.设置点b2、c2、d2、e2和f2,点o、a0、b2、c2、d2、e2和f2位于同一平面,且点o和f2的连线垂直于y轴,点o、a0、b2、c2、d2、e2和f2顺次连接围成第二截面,第二截面以y轴为中心旋转360度,得到水平结构的光学凸透镜;
15.设置点b3、c3、d3、e3和f3,点o、a0、b3、c3、d3、e3和f3位于同一平面,且点o和f3的连线垂直于y轴,点o、a0、b3、c3、d3、e3和f3顺次连接围成第三截面,第三截面以y轴为中心旋转360度,得到对角线结构的光学凸透镜。
16.进一步地,步骤s2中,基础摄像头包括从物侧到像侧顺次排列的第一透镜、第二透镜、第三透镜、第四透镜、第五透镜以及cmos图像传感器;
17.其中,第一透镜为物侧为凸面,像侧为凹面的透镜,且第一透镜的凸面曲率半径>1.2米;第二透镜为双凸透镜,第三透镜为双凸透镜,第四透镜为双凹透镜,第三透镜和第四透镜组成胶合透镜,第五透镜为物侧为凹面,像侧为凸面的凹凸透镜;
18.标准图像构建为矩形方框,与cmos图像传感器(506)的长
×
宽的尺寸相对应,其中,基准点a设置在矩形方框的中心点,设置平行于矩形方框长边的中心线为水平对称线,平行于矩形方框短边的中心线为垂直对称线;从中心向外,设置点a、b、c和d顺次分布在水平对称线上,设置点a、e、f顺次分布在垂直对称线上,设置点g、h、i顺次分布在矩形对角线上,b、c、d、e、f、g、h和i点均为标准点。
19.进一步地,步骤s3中,分别将步骤s1中预构建的上下结构的光学凸透镜、水平结构的光学凸透镜以及对角线结构的光学凸透镜替换步骤s2中构建的基础摄像头中的第五透镜(502),基础摄像头中的其余部件保持不变,构成基于上下结构的光学凸透镜的第一矫正摄像头、基于水平结构的光学凸透镜的第二矫正摄像头和基于对角线结构的光学凸透镜的第三矫正摄像头。
20.进一步地,步骤s4中,根据iso16505道路车辆—摄像机监控系统的人体工程学和性能方面—要求和测试程序,设置基于上下结构的光学凸透镜的第一矫正摄像头成像距离20米时,放大倍数为0.3464,进行摄像头透镜组上下结构的放大倍数调整,具体如下:
21.采用基于上下结构的光学凸透镜的第一矫正摄像头对标准图像进行成像,得到第一成像图像,标准图像中的标准点e和f经过基于上下结构的光学凸透镜的第一矫正摄像头的成像,对应第一成像图像中的移动点e’和f’;
22.调整由点a0、b1、c1和d1组成的曲率半径,即增加基于上下结构的光学凸透镜的放大倍数,实现e点与e’点重合,记录曲率半径中b1点数值,为b1点曲率半径数据d
b1
;
23.调整由点a0、b1、c1和d1组成的曲率半径,即增加基于上下结构的光学凸透镜的放
大倍数,实现f点与f’点重合,记录曲率半径中c1点数值,为c1点曲率半径数据d
c1
;
24.调整由点a0、b1、c1和d1组成的曲率半径,即增加基于上下结构的光学凸透镜的放大倍数,保证e点与e’点重合及f点与f’点重合同时,调整d1点数值,使得标准图像与第一成像图像在垂直对称线方向的边缘重合,记录曲率半径中d1点数值,为d1点曲率半径数据d
d1
;
25.得到矫正之后的数据a0、d
b1
、d
c1
和d
d1
,由此得到由a0、d
b1
、d
c1
和d
d1
构成的第一矫正曲率半径;
26.根据iso16505道路车辆—摄像机监控系统的人体工程学和性能方面—要求和测试程序,设置基于水平结构的光学凸透镜的第二矫正摄像头成像距离20米时,放大倍数为0.3464,进行摄像头透镜组水平结构的放大倍数调整,具体如下:
27.采用基于水平结构的光学凸透镜的第二矫正摄像头对标准图像进行成像,得到第二成像图像,标准图像中的标准点b、c和d经过基于水平结构的光学凸透镜的第二矫正摄像头的成像,对应第二成像图像中的移动点b’、c’和d’;
28.调整由点a0、b2、c2、d2和e2组成的曲率半径,即增加基于水平结构的光学凸透镜的放大倍数,实现b点与b’点重合,记录曲率半径中b2点数值,为b2点曲率半径数据d
b2
;
29.调整由点a0、b2、c2、d2和e2组成的曲率半径,即增加基于水平结构的光学凸透镜的放大倍数,实现c点与c’点重合,记录曲率半径中c2点数值,为c2点曲率半径数据d
c2
;
30.调整由点a0、b2、c2、d2和e2组成的曲率半径,即增加基于水平结构的光学凸透镜的放大倍数,实现d点与d’点重合,记录曲率半径中d2点数值,为d2点曲率半径数据d
d2
;
31.调整由点a0、b2、c2、d2和e2组成的曲率半径,即增加基于水平结构的光学凸透镜的放大倍数,保证b点与b’点重合、c点与c’点重合及d点与d’点重合同时,调整e2点数值,使得标准图像与第二成像图像在水平对称线方向的边缘重合,记录曲率半径中e2点数值,为e2点曲率半径数据d
e2
;
32.得到矫正之后的数据a0、d
b2
、d
c2
、d
d2
和d
e2
,由此得到由a0、d
b2
、d
c2
、d
d2
和d
e2
构成的第二矫正曲率半径;
33.根据iso16505道路车辆—摄像机监控系统的人体工程学和性能方面—要求和测试程序,设置基于对角线结构的光学凸透镜的第三矫正摄像头成像距离20米时,放大倍数为0.3464,进行摄像头透镜组对角线结构的放大倍数调整,具体如下:
34.采用基于对角线结构的光学凸透镜的第三矫正摄像头对标准图像进行成像,得到第三成像图像,标准图像中的标准点g、h和i经过基于对角线结构的光学凸透镜的第三矫正摄像头的成像,对应第三成像图像中的移动点g’、h’和i’;
35.调整由点a0、b3、c3、d3和e3组成的曲率半径,即增加基于对角线结构的光学凸透镜的放大倍数,实现g点与g’点重合,记录曲率半径中b3点数值,为b3点曲率半径数据d
b3
;
36.调整由点a0、b3、c3、d3和e3组成的曲率半径,即增加基于对角线结构的光学凸透镜的放大倍数,实现h点与h’点重合,记录曲率半径中c3点数值,为c3点曲率半径数据d
c3
;
37.调整由点a0、b3、c3、d3和e3组成的曲率半径,即增加基于对角线结构的光学凸透镜的放大倍数,实现i点与i’点重合,记录曲率半径中d3点数值,为d3点曲率半径数据d
d3
;
38.调整由点a0、b3、c3、d3和e3组成的曲率半径,即增加基于对角线结构的光学凸透镜的放大倍数,保证g点与g’点重合、h点与h’点重合及i点与i’点重合同时,调整e3点数值,使得标准图像与第三成像图像在对对角线方向的边缘重合,记录曲率半径中e3点数值,为e3点
曲率半径数据d
e3
;
39.得到矫正之后的数据a0、d
b3
、d
c3
和e
e3
组成,由此得到由a0、d
b3
、d
c3
和e
e3
构成的第三矫正曲率半径。
40.进一步地,步骤s5中,基于直角坐标系,经过第一曲面混合组成光学透镜的中心点即o点,设置水平截面、垂直截面和两个对角线截面,水平截面垂直于垂直截面,两个对角线截面相互垂直,且均将水平截面和垂直截面形成的直角等分;
41.其中,水平截面分为关于y轴对称的第一水平截面和第二水平截面,对应第一矫正曲率半径;垂直截面分为关于y轴对称的第一垂直截面和第二垂直截面,对应第二矫正曲率半径;两个对角线截面分为关于y轴对称的第一对角线截面、第二对角线截面、第三对角线截面和第四对角线截面,对应第三矫正曲率半径。
42.进一步地,首先构建第一水平截面、第二水平截面、第一垂直截面、第二垂直截面、第一对角线截面、第二对角线截面、第三对角线截面和第四对角线截面共8个截面,其次借助通用的机械零件设计软件,例如:三维机械零件设计软件solidworks、pro/engineer和siemens nx(ug),将8个曲面混合组成整体光学透镜,即生成第一曲面混合组成光学透镜。
43.进一步地,采用第一曲面混合组成光学透镜替换步骤s2中构建的基础摄像头中的第五透镜,得到矫正光学摄像头。
44.进一步地,步骤s6中,前移放大基础摄像头包括第一透镜、第五透镜、第三透镜、第四透镜、第二透镜以及cmos图像传感器;
45.将生成的第二曲面混合组成光学透镜,替换构建的前移放大基础摄像头中的第五透镜,得到前移放大矫正光学摄像头。
46.相比与现有技术,本发明的优点在于:
47.(1)本发明构造的矫正光学摄像头和前移放大矫正光学摄像头采用水平放大倍数与垂直放大倍数两种放大倍数方法,进行图像畸变矫正;
48.(2)相对于软件图像矫正而言,本发明可以节省软件图像矫正的处理延时;
49.(3)软件图像矫正的软件编程及程序存储需要电路和硬件,图像矫正成本高,本发明构造的矫正光学摄像头和前移放大矫正光学摄像头可以通过模具压制制造生产,具有制造成本低的优点。
附图说明
50.图1为本发明实施例中构建的上下结构的光学凸透镜的结构示意图;
51.图2为本发明实施例中构建的水平结构的光学凸透镜的结构示意图;
52.图3为本发明实施例中构建的对角线结构的光学凸透镜的结构示意图;
53.图4为本发明实施例中构建的基础摄像头的结构示意图;
54.图5为本发明实施例中构建的标准图像;
55.图6为本发明实施例中标准图像经过基础摄像头放大后的图像;
56.图7为本发明实施例中标准图像和经过基础摄像头放大后的图像的合成效果图;
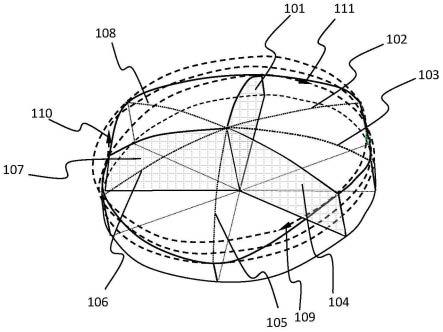
57.图8为本发明实施例中构建的曲面混合组成光学透镜结构示意图;
58.图9为本发明实施例中曲面混合组成光学透镜的组合示意图;
59.图10为本发明实施例中矫正光学摄像头的结构示意图;
60.图11为本发明实施例中构建的前移放大基础摄像头的结构示意图
61.图12为本发明实施例1中前移放大矫正光学摄像头的结构示意图;
62.图13为本发明实施例中正方形单元构成的标准矩形图像;
63.图14为本发明实施例中标准矩形图像经过基础摄像头或前移放大基础摄像头放大后形成的弯曲矩形图像;
64.图15a为本发明实施例2中前移放大矫正光学摄像头的结构示意图;
65.图15b为本发明实施例3中前移放大矫正光学摄像头的结构示意图;
66.图15c为本发明实施例4中前移放大矫正光学摄像头的结构示意图。
具体实施方式
67.为使本发明的目的、技术方案和优点更加清楚明白,下面结合附图并举实施例,对本发明的具体实施进行详细说明。
68.实施例1:
69.车载摄像头的图像矫正光学透镜制作方法,包括以下步骤:
70.s1、预构建上下结构的光学凸透镜、水平结构的光学凸透镜以及对角线结构的光学凸透镜;
71.设置直角坐标系,原点为o点,设置o点和a0点的连线为y轴;
72.如图1所示,设置点b1、c1、d1和e1,点o、a0、b1、c1、d1和e1位于同一平面,且点o和e1的连线垂直于y轴,点o、a0、b1、c1、d1和e1顺次连接围成第一截面101,第一截面101以y轴为中心,按照d1切线方向,也是111箭头方向旋转360度,也可以描述为第一截面101以y轴为中心旋转360度,得到上下结构的光学凸透镜;
73.如图2所示,设置点b2、c2、d2、e2和f2,点o、a0、b2、c2、d2、e2和f2位于同一平面,且点o和f2的连线垂直于y轴,点o、a0、b2、c2、d2、e2和f2顺次连接围成第二截面107,第二截面107以y轴为中心,按照e2切线方向,也是110箭头方向旋转360度,也可以描述为第二截面107以y轴为中心旋转360度,得到水平结构的光学凸透镜;
74.如图3所示,设置点b3、c3、d3、e3和f3,点o、a0、b3、c3、d3、e3和f3位于同一平面,且点o和f3的连线垂直于y轴,点o、a0、b3、c3、d3、e3和f3顺次连接围成第三截面104,第三截面104以y轴为中心,按照e3切线方向,也是109箭头方向旋转360度,也可以描述为第三截面104以y轴为中心旋转360度,得到对角线结构的光学凸透镜。
75.s2、构建基础摄像头以及标准图像,并在标准图像中标注基准点和标准点;
76.如图4所示,基础摄像头包括从物侧到像侧顺次排列的第一透镜501、第二透镜505、第三透镜503、第四透镜504、第五透镜502以及cmos图像传感器506;
77.其中,第一透镜501为物侧为凸面,像侧为凹面的透镜,且第一透镜的凸面曲率半径>1.2米;第二透镜505为双凸透镜,第三透镜503为双凸透镜,第四透镜504为双凹透镜,第三透镜503和第四透镜504组成胶合透镜,第五透镜502为物侧为凹面,像侧为凸面的凹凸透镜;
78.如图5所示,标准图像构建为矩形方框,与cmos图像传感器506的长
×
宽的尺寸相对应,其中,基准点a设置在矩形方框的中心点,设置平行于矩形方框长边的中心线为水平对称线,平行于矩形方框短边的中心线为垂直对称线;从中心向外,设置点a、b、c和d顺次分
布在水平对称线上,设置点a、e、f顺次分布在垂直对称线上,设置点g、h、i顺次分布在矩形对角线上,b、c、d、e、f、g、h和i点均为标准点。
79.标准点b与基准点a距离为h
hor2
,标准点c与基准点a距离为h
hor4
,标准点d与基准点a距离为h
hor6
。标准点e与基准点a距离为h
ver2
,标准点f与基准点a距离为h
ver4
。标准点g与基准点a距离为h
dia2
,标准点h与基准点a距离为h
dia4
,标准点i与基准点a距离为h
dia6
。
80.s3、根据基础摄像头构建基于上下结构的光学凸透镜的第一矫正摄像头、基于水平结构的光学凸透镜的第二矫正摄像头和基于对角线结构的光学凸透镜的第三矫正摄像头;
81.分别将步骤s1中预构建的上下结构的光学凸透镜、水平结构的光学凸透镜以及对角线结构的光学凸透镜替换步骤s2中构建的基础摄像头中的第五透镜502,基础摄像头中的其余部件保持不变,构成基于上下结构的光学凸透镜的第一矫正摄像头、基于水平结构的光学凸透镜的第二矫正摄像头和基于对角线结构的光学凸透镜的第三矫正摄像头。
82.s4、根据标准图像调整上下结构的光学凸透镜、水平结构的光学凸透镜和对角线结构的光学凸透镜的参数;
83.根据iso16505道路车辆—摄像机监控系统的人体工程学和性能方面—要求和测试程序,设置基于上下结构的光学凸透镜的第一矫正摄像头成像距离20米时,放大倍数为0.3464,进行摄像头透镜组上下结构的放大倍数调整,具体如下:
84.如图6、图7所示,采用基于上下结构的光学凸透镜的第一矫正摄像头对标准图像进行成像,得到第一成像图像,标准图像中的标准点e和f经过基于上下结构的光学凸透镜的第一矫正摄像头的成像,对应第一成像图像中的移动点e’和f’;标准点e’与基准点a距离为h
ver1
,标准点f’与基准点a距离为h
ver3
。
85.调整由点a0、b1、c1和d1组成的曲率半径,即增加基于上下结构的光学凸透镜的放大倍数,实现e点与e’点重合,即h
ver1
=h
ver2
,记录曲率半径中b1点数值,为b1点曲率半径数据d
b1
;
86.调整由点a0、b1、c1和d1组成的曲率半径,即增加基于上下结构的光学凸透镜的放大倍数,实现f点与f’点重合,即h
ver3
=h
ver4
,记录曲率半径中c1点数值,为c1点曲率半径数据d
c1
;
87.调整由点a0、b1、c1和d1组成的曲率半径,即增加基于上下结构的光学凸透镜的放大倍数,保证e点与e’点重合及f点与f’点重合同时,调整d1点数值,使得标准图像与第一成像图像在垂直对称线方向的边缘重合,记录曲率半径中d1点数值,为d1点曲率半径数据d
d1
;
88.得到矫正之后的数据a0、d
b1
、d
c1
和d
d1
,由此得到由a0、d
b1
、d
c1
和d
d1
构成的第一矫正曲率半径;
89.根据iso16505道路车辆—摄像机监控系统的人体工程学和性能方面—要求和测试程序,设置基于水平结构的光学凸透镜的第二矫正摄像头成像距离20米时,放大倍数为0.3464,进行摄像头透镜组水平结构的放大倍数调整,具体如下:
90.如图6、图7所示,采用基于水平结构的光学凸透镜的第二矫正摄像头对标准图像进行成像,得到第二成像图像,标准图像中的标准点b、c和d经过基于水平结构的光学凸透镜的第二矫正摄像头的成像,对应第二成像图像中的移动点b’、c’和d’;标准点b’与基准点a距离为h
hor1
,标准点c’与基准点a距离为h
hor3
,标准点d’与基准点a距离为h
hor5
。
91.调整由点a0、b2、c2、d2和e2组成的曲率半径,即增加基于水平结构的光学凸透镜的放大倍数,实现b点与b’点重合,即h
hor1
=h
hor2
,记录曲率半径中b2点数值,为b2点曲率半径数据d
b2
;
92.调整由点a0、b2、c2、d2和e2组成的曲率半径,即增加基于水平结构的光学凸透镜的放大倍数,实现c点与c’点重合,即h
hor3
=h
hor4
,记录曲率半径中c2点数值,为c2点曲率半径数据d
c2
;
93.调整由点a0、b2、c2、d2和e2组成的曲率半径,即增加基于水平结构的光学凸透镜的放大倍数,实现d点与d’点重合,即h
hor5
=h
hor6
,记录曲率半径中d2点数值,为d2点曲率半径数据d
d2
;
94.调整由点a0、b2、c2、d2和e2组成的曲率半径,即增加基于水平结构的光学凸透镜的放大倍数,保证b点与b’点重合、c点与c’点重合及d点与d’点重合同时,调整e2点数值,使得标准图像与第二成像图像在水平对称线方向的边缘重合,记录曲率半径中e2点数值,为e2点曲率半径数据d
e2
;
95.得到矫正之后的数据a0、d
b2
、d
c2
、d
d2
和d
e2
,由此得到由a0、d
b2
、d
c2
、d
d2
和d
e2
构成的第二矫正曲率半径;
96.根据iso16505道路车辆—摄像机监控系统的人体工程学和性能方面—要求和测试程序,设置基于对角线结构的光学凸透镜的第三矫正摄像头成像距离20米时,放大倍数为0.3464,进行摄像头透镜组对角线结构的放大倍数调整,具体如下:
97.如图6、图7所示,采用基于对角线结构的光学凸透镜的第三矫正摄像头对标准图像进行成像,得到第三成像图像,标准图像中的标准点g、h和i经过基于对角线结构的光学凸透镜的第三矫正摄像头的成像,对应第三成像图像中的移动点g’、h’和i’;标准点g’与基准点a距离为h
dia1
,标准点h’与基准点a距离为h
dia3
,标准点i’与基准点a距离为h
dia5
。
98.调整由点a0、b3、c3、d3和e3组成的曲率半径,即增加基于对角线结构的光学凸透镜的放大倍数,实现g点与g’点重合,即h
dia1
=h
dia2
,记录曲率半径中b3点数值,为b3点曲率半径数据d
b3
;
99.调整由点a0、b3、c3、d3和e3组成的曲率半径,即增加基于对角线结构的光学凸透镜的放大倍数,实现h点与h’点重合,即h
dia3
=h
dia4
,记录曲率半径中c3点数值,为c3点曲率半径数据d
c3
;
100.调整由点a0、b3、c3、d3和e3组成的曲率半径,即增加基于对角线结构的光学凸透镜的放大倍数,实现i点与i’点重合,即h
dia5
=h
dia6
,记录曲率半径中d3点数值,为d3点曲率半径数据d
d3
;
101.调整由点a0、b3、c3、d3和e3组成的曲率半径,即增加基于对角线结构的光学凸透镜的放大倍数,保证g点与g’点重合、h点与h’点重合及i点与i’点重合同时,调整e3点数值,使得标准图像与第三成像图像在对对角线方向的边缘重合,记录曲率半径中e3点数值,为e3点曲率半径数据d
e3
;
102.得到矫正之后的数据a0、d
b3
、d
c3
和e
e3
组成,由此得到由a0、d
b3
、d
c3
和e
e3
构成的第三矫正曲率半径。
103.s5、根据步骤s4得到的上下结构的光学凸透镜、水平结构的光学凸透镜和对角线结构的光学凸透镜的参数,生成第一曲面混合组成光学透镜,得到矫正光学摄像头;
104.如图8和图9所示,基于直角坐标系,经过第一曲面混合组成光学透镜的中心点即o点,设置水平截面、垂直截面和两个对角线截面,水平截面垂直于垂直截面,两个对角线截面相互垂直,且均将水平截面和垂直截面形成的直角等分;
105.其中,水平截面分为关于y轴对称的第一水平截面和第二水平截面,对应第一矫正曲率半径;垂直截面分为关于y轴对称的第一垂直截面和第二垂直截面,对应第二矫正曲率半径;两个对角线截面分为关于y轴对称的第一对角线截面、第二对角线截面、第三对角线截面和第四对角线截面,对应第三矫正曲率半径。
106.首先构建第一水平截面、第二水平截面、第一垂直截面、第二垂直截面、第一对角线截面、第二对角线截面、第三对角线截面和第四对角线截面共8个截面,其次借助通用的机械零件设计软件,例如:三维机械零件设计软件solidworks、pro/engineer和siemens nxug,将8个曲面混合组成整体光学透镜,即生成第一曲面混合组成光学透镜507。
107.如图10所示,采用第一曲面混合组成光学透镜507替换步骤s2中构建的基础摄像头中的第五透镜502,得到矫正光学摄像头。
108.s6、构建前移放大基础摄像头,将基础摄像头替换为前移放大基础摄像头,重复步骤s3~s5,生成第二曲面混合组成光学透镜,得到前移放大光学摄像头;
109.本实施例中,如图11所示,前移放大基础摄像头包括从物侧到像侧顺次排列的第一透镜501、第五透镜502、第三透镜503、第四透镜504、第二透镜505以及cmos图像传感器506;
110.其中,第一透镜501为物侧为凸面,像侧为凹面的透镜,且第一透镜的凸面曲率半径>1.2米;第二透镜505为双凸透镜,第三透镜503为双凸透镜,第四透镜504为双凹透镜,第三透镜503和第四透镜504组成胶合透镜,第五透镜502为物侧为凹面,像侧为凸面的凹凸透镜;
111.本实施例中,如图12所示,将生成的第二曲面混合组成光学透镜508,替换构建的前移放大基础摄像头中的第五透镜502,得到前移放大矫正光学摄像头。
112.在图13、图14中,正方形单元构成标准矩形图像600,透镜上下结构曲率半径601,对角线结构曲率半径602,水平结构曲率半径603,正方形单元604,正方形单元605,正方形单元606,正方形单元607,正方形单元608,正方形单元609,具有正方形方格的矩形标准图像如图10所示,长款比例与cmos图像传感器尺寸对应,具有正方形方格的矩形标准图像如图10所示,经过基础摄像头放大之后,生成弯曲矩形单元604',弯曲矩形单元605',弯曲矩形单元606',弯曲矩形单元607',弯曲矩形单元608',弯曲矩形单元609'。
113.按照本发明的步骤可以实现对角线方向的放大倍数调整和设计,当对角线方向矫正图像畸变时,拉伸长度为l
dia
的距离,矫正图像畸变之后,与正方形单元构成标准矩形图像近似重合,也就是增加摄像头光学透镜组对角线方向的放大倍数。
114.按照本发明的步骤可以实现对角线方向的放大倍数调整和设计,当水平方向矫正图像畸变时,拉伸长度为l
hor
的距离,矫正图像畸变之后,与正方形单元构成标准矩形图像近似重合,也就是增加摄像头光学透镜组对角线方向的放大倍数。
115.按照本发明的步骤可以实现对角线方向的放大倍数调整和设计,当上下方向矫正图像畸变时,拉伸长度为l
verr
的距离,矫正图像畸变之后,与正方形单元构成标准矩形图像近似重合,也就是增加摄像头光学透镜组对角线方向的放大倍数。
116.经过上述图像矫正之后,摄像头放大形成弯曲矩形图像近似正方形单元构成标准矩形图像。
117.实施例2:
118.本实施例与实施例1的不同之处在于,步骤s6中,前移放大基础摄像头包括从物侧到像侧顺次排列的第一透镜501、第三透镜503、第五透镜502、第四透镜504、第二透镜505以及cmos图像传感器506;
119.其中,第一透镜501为物侧为凸面,像侧为凹面的透镜,且第一透镜的凸面曲率半径>1.2米;第二透镜505为双凸透镜,第三透镜503为双凸透镜,第四透镜504为双凹透镜,第五透镜502为物侧为凹面,像侧为凸面的凹凸透镜;
120.本实施例中,如图15a所示,将生成的第二曲面混合组成光学透镜508,替换构建的前移放大基础摄像头中的第五透镜502,得到前移放大矫正光学摄像头。
121.实施例3:
122.本实施例与实施例1的不同之处在于,步骤s6中,前移放大基础摄像头包括从物侧到像侧顺次排列的第五透镜502、第一透镜501、第三透镜503、第四透镜504、第二透镜505以及cmos图像传感器506;
123.其中,第一透镜501为物侧为凸面,像侧为凹面的透镜,且第一透镜的凸面曲率半径>1.2米;第二透镜505为双凸透镜,第三透镜503为双凸透镜,第四透镜504为双凹透镜,第三透镜503和第四透镜504组成胶合透镜,第五透镜502为物侧为凹面,像侧为凸面的凹凸透镜;
124.本实施例中,如图15b所示,将生成的第二曲面混合组成光学透镜508,替换构建的前移放大基础摄像头中的第五透镜502,得到前移放大矫正光学摄像头。
125.实施例4:
126.本实施例与实施例1的不同之处在于,步骤s6中,前移放大基础摄像头包括从物侧到像侧顺次排列的第一透镜501、第三透镜503、第四透镜504、第五透镜502、第六透镜509、第二透镜505以及cmos图像传感器506;
127.其中,第一透镜501为物侧为凸面,像侧为凹面的透镜,且第一透镜的凸面曲率半径>1.2米;第二透镜505为双凸透镜,第三透镜503为双凸透镜,第四透镜504为双凹透镜,第三透镜503和第四透镜504组成胶合透镜,第五透镜502为物侧为凹面,像侧为凸面的凹凸透镜;第六透镜509为物侧为凸面,像侧为凹面的透镜;
128.本实施例中,如图15c所示,将生成的第二曲面混合组成光学透镜508,替换构建的前移放大基础摄像头中的第五透镜502,得到前移放大矫正光学摄像头。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1