一种全自动COG邦定机的制作方法
一种全自动cog邦定机
技术领域
1.本实用新型属于cog邦定技术领域,尤其涉及一种全自动cog邦定机。
背景技术:
2.邦定是芯片生产工艺中一种打线的方式,一般用于封装前将芯片内部电路用金线或铝线与封装管脚或线路板镀金铜箔连接,来自超声波发生器的超声波(一般为40-140khz),经换能器产生高频振动,通过变幅杆传送到劈刀,当劈刀与引线及被焊件接触时,在压力和振动的作用下,待焊金属表面相互摩擦,氧化膜被破坏,并发生塑性变形,致使两个纯净的金属面紧密接触,达到原子距离的结合,最终形成牢固的机械连接。一般邦定后(即电路与管脚连接后)用黑胶将芯片封装。cog邦定机是将ic芯片精确定位于lcd玻璃之上并进行绑定的装置,整机由plc+hmi组成控制核心,图像自动对位系统pv310完成目标对象的对位数据计算,产品在完成对位并预压后由平台传输到本压进行绑定压接。采用plc控制系统,平台伺服传动定位,恒温加热方式,配合不锈钢热压头,实现恒温压接。下对位方式用来压接ic产品清晰自动对位。
3.然而,在现有技术中目前的cog邦定机大多采用人工上料和定位后再进行邦定,工作效率较低。
技术实现要素:
4.本实用新型提供一种全自动cog邦定机,旨在解决目前的cog邦定机的工作效率较低问题。
5.本实用新型是这样实现的,一种全自动cog邦定机,包括底板,其特征在于,所述底板上端面前端设置有控制器,所述控制器正面设置有启动按钮和关闭按钮,所述控制器后端设置有第一电机,所述第一电机上端设置有第一运动架,所述第一运动架后端设置有第二电机,所述第一运动架上端设置有第二运动架,所述第二运动架上端面设置有固定模具,所述第二运动架两侧设置有电缸,所述启动按钮、所述关闭按钮、所述第一电机、所述第二电机和所述电缸与外部电源及所述控制器电连接,并受所述控制器控制。
6.更进一步地,所述第一电机输出轴上设置有联轴器,所述联轴器左端设置有减速器,所述减速器左端设置有第一丝杆。
7.更进一步地,所述第一丝杆上设置有第一连接环,所述第一连接环设置于第一连接块下端,所述第一连接块设置于所述第一运动架下端。
8.更进一步地,所述第一连接块下端两侧设置有第一滑块,所述第一滑块下端设置有第一滑轨,所述第一滑轨设置于所述底板上。
9.更进一步地,所述第二电机设置于电机架上,所述电机架设置于所述第一运动架后端面下端,所述第二电机输出轴上设置有主动轮,所述主动轮外端设置有传送带,所述传送带上端设置有从动轮,所述从动轮内设置有第二丝杆。
10.更进一步地,所述第二丝杆后端设置有轴承架,所述轴承架设置于所述第一运动
架上端,所述第二丝杆上设置有第二连接块,所述第二连接块设置于所述第二运动架下端。
11.更进一步地,所述第二运动架下端两侧设置有第二滑块,所述第二滑块下端设置有第二滑轨,所述第二滑轨设置于所述第一运动架上端。
12.更进一步地,所述第二运动架两侧设置有所述电缸,所述电缸上端设置有伸缩杆,所述伸缩杆上端设置有连接筒,所述连接筒上设置有连接轴,所述连接轴上设置有压合块。
13.更进一步地,所述底板上端面前端和所述第一运动架左端均设置有调位装置,所述底板和所述第一运动架与所述调位装置连接处分别设置有第一定位轨和第二定位轨,所述第一运动架和所述第二运动架与所述调位装置连接处分别设置有第一连接片和第二连接片。
14.更进一步地,所述调位装置左端设置有限位块,所述限位块上设置有限位螺栓,所述限位螺栓分别设置于所述第一定位轨和所述第二定位轨内。
15.关于实施本实用新型的有益技术效果为:首先,由于本实用新型设置了第一丝杆、第一运动架、第二丝杆、第二运动架、固定模具和压合块,使得本实用新型可在两个方向上移动并在固定模具接收到芯片ic后由压合块稳定压合,提高了本实用新型的工作效率;其次,由于本实用新型设置了第一连接片、第一定位轨、第二连接片、第二定位轨和调位装置,使得本实用新型可在长时间使用后由第一连接片和第二连接片与调位装置的相对位移将第一运动架和第二运动架位置校准,提高了本实用新型的实用性。
附图说明
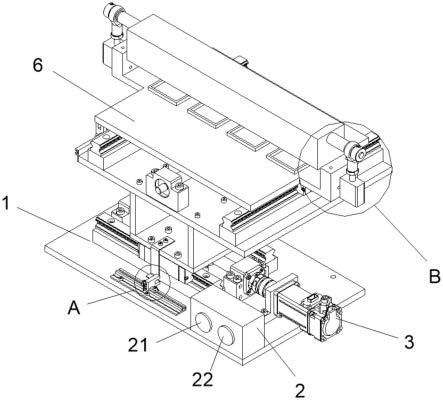
16.图1是本实用新型的整体第一视角结构图;
17.图2是本实用新型的整体第二视角结构图;
18.图3是本实用新型的整体第三视角结构图;
19.图4是本实用新型的附图1中a处局部视图;
20.图5是本实用新型的附图1中b处局部视图;
21.图6是本实用新型的附图2中c处局部视图;
22.图7是本实用新型的附图2中d处局部视图;
23.图8是本实用新型的附图3中e处局部视图;
24.图9是本实用新型的附图3中f处局部视图;
25.图中:1、底架;11、第一滑轨;12、第一定位轨;2、控制器;21、启动按钮;22、关闭按钮;3、第一电机;31、联轴器;32、减速器;33、第一丝杆;4、第二电机;41、主动轮;42、传送带;43、从动轮;44、第二丝杆;45、轴承架;5、第一运动架;51、第一连接块;52、第一连接环;53、第一滑块;54、电机架;55、第二滑轨;56、第二定位轨;57、第一连接片;6、第二运动架;62、固定模具;63、第二连接块;64、第二滑块;65、第二连接片;7、电缸;71、伸缩杆;72、连接筒;73、连接轴;74、压合块;8、调位装置;81、限位块;82、限位螺栓。
具体实施方式
26.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
27.参照图1-图9,本实用新型为一种全自动cog邦定机,包括底板1,其特征在于,底板1上端面前端设置有控制器2,控制器2正面设置有启动按钮21和关闭按钮22,控制器2后端设置有第一电机3,第一电机3上端设置有第一运动架5,第一运动架5后端设置有第二电机4,第一运动架5上端设置有第二运动架6,第二运动架6上端面设置有固定模具62,第二运动架6两侧设置有电缸7,启动按钮21、关闭按钮22、第一电机3、第二电机4和电缸7与外部电源及控制器2电连接,并受控制器2控制。
28.第一电机3输出轴上设置有联轴器31,联轴器31左端设置有减速器32,减速器32左端设置有第一丝杆33,便于带动第一丝杆33转动。
29.第一丝杆33上设置有第一连接环52,第一连接环52设置于第一连接块51下端,第一连接块51设置于第一运动架5下端,便于带动第一运动架5移动。
30.第一连接块51下端两侧设置有第一滑块53,第一滑块53下端设置有第一滑轨11,第一滑轨11设置于底板1上,使得第一运动架5稳定移动。
31.第二电机4设置于电机架54上,电机架54设置于第一运动架5后端面下端,第二电机4输出轴上设置有主动轮41,主动轮41外端设置有传送带42,传送带42上端设置有从动轮43,从动轮43内设置有第二丝杆44,便于带动第二丝杆44旋转。
32.第二丝杆44后端设置有轴承架45,轴承架45设置于第一运动架5上端,第二丝杆44上设置有第二连接块63,第二连接块63设置于第二运动架6下端,便于带动第二运动架6移动。
33.第二运动架6下端两侧设置有第二滑块64,第二滑块64下端设置有第二滑轨55,第二滑轨55设置于第一运动架5上端,使得第二运动架6稳定移动。
34.第二运动架6两侧设置有电缸7,电缸7上端设置有伸缩杆71,伸缩杆71上端设置有连接筒72,连接筒72上设置有连接轴73,连接轴73上设置有压合块74,便于将芯片ic压合。
35.底板1上端面前端和第一运动架5左端均设置有调位装置8,底板1和第一运动架5与调位装置8连接处分别设置有第一定位轨12和第二定位轨56,第一运动架5和第二运动架6与调位装置8连接处分别设置有第一连接片57和第二连接片65,便于长时间使用后查看移动位置误差。
36.调位装置8左端设置有限位块81,限位块81上设置有限位螺栓82,限位螺栓82分别设置于第一定位轨12和第二定位轨56内,便于固定调位装置8。
37.本实用新型的工作原理为:使用本实用新型时,先将玻璃置于固定模具62内,再启动第一电机3和第二电机4,第一电机3带动第一丝杆33旋转,第一连接环52与第一丝杆33啮合带动第一运动架5在第一方向上运动;第二电机4带动主动轮41旋转,主动轮41通过传送带42和从动轮43带动第二丝杆44旋转,第二连接块63与第二丝杆44啮合带动第二运动架6在第二方向上运动,待固定模具运动至合适位置后由外部装置将芯片ic置于固定模具62内,启动电缸7,电缸7通过伸缩杆71带动连接筒72下降,连接筒72带动压合块74将芯片ic与玻璃邦定。
38.关于实施本实用新型的有益技术效果为:首先,由于本实用新型设置了第一丝杆33、第一运动架5、第二丝杆44、第二运动架6、固定模具62和压合块74,使得本实用新型可在两个方向上移动并在固定模具62接收到芯片ic后由压合块74稳定压合,提高了本实用新型的工作效率;其次,由于本实用新型设置了第一连接片57、第一定位轨12、第二连接片65、第
二定位轨56和调位装置8,使得本实用新型可在长时间使用后由第一连接片57和第二连接片65与调位装置8的相对位移将第一运动架5和第二运动架6位置校准,提高了本实用新型的实用性。
39.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1