一种用于摄像头模组主动对准的方法及装置与流程
本技术涉及电子设备制造,尤其涉及一种用于摄像头模组主动对准的技术。
背景技术:
1、随着移动互联网、物联网及自动驾驶技术的高速发展,智能终端设备、自动驾驶车辆、智能制造工厂等对摄像头模组的需求急剧提升,并且对摄像头模组的清晰度以及一致性提出了更高精度的要求。比如,自动驾驶车辆的前视摄像头模组除了拍摄车辆前方的路况,还用于测距防撞等,焦距长,对摄像头模组的组装性能也提出了更高要求。
2、aa(active alignment,主动对准)技术是摄像头模组产线上常采用的一种精细自动化装配技术,可自动进行摄像头模组的镜头与图像传感器的对准,以尽可能使得镜头的中心与图像传感器的中心位于与焦平面垂直的同一轴线,以及图像传感器位于镜头的焦平面上且平行。应用aa技术可以极大地提升摄像头模组的清晰度、光轴对准精度,减少焦平面的倾斜程度,从而可提升摄像头模组的图像采集质量和一致性,应用aa技术装配的摄像头模组的成像图像质量是最接近最佳的。
3、现有aa技术中,通常是沿光轴(z轴)方向一步一步调整镜头的z轴位置,每次记录下当次的镜头z轴位置并在调整到位稳定后对测试图卡(或称图像检测板)拍摄照片,然后根据得到的所有照片,计算照片中相关roi区域的图像质量指标并进行比较,确定相不同roi区域的图像质量指标最佳时对应的镜头z轴位置,并确定相关镜头z轴位置的距离差值,再据此进行倾斜校正。还通过照片中心区域的中心位置与图像传感器中心在x/y平面上的偏差(即在平面的x/y轴方向的偏差),根据该偏差进行光学中心对准。
4、现有aa技术中,摄像头模组的镜头z轴位置调整通常是通过电机驱动传动机构及夹爪实现的,每次调整都需要电机启动、到位后停止,在摄像头模组的镜头稳定后才拍摄照片,整个过程需要电机反复启动和停止并等待电机稳定,使得产线上在摄像头模组的主动对准时花费较多时间,影响到生产效率。
技术实现思路
1、本技术的目的是提供一种用于摄像头模组主动对准的方法及装置,用以至少部分解决现有aa技术中因电机反复启动和停止并等待电机稳定而带来的生产效率不够高的技术问题。
2、根据本技术的一个方面,提供了一种用于摄像头模组主动对准的方法,其中,所述方法包括:
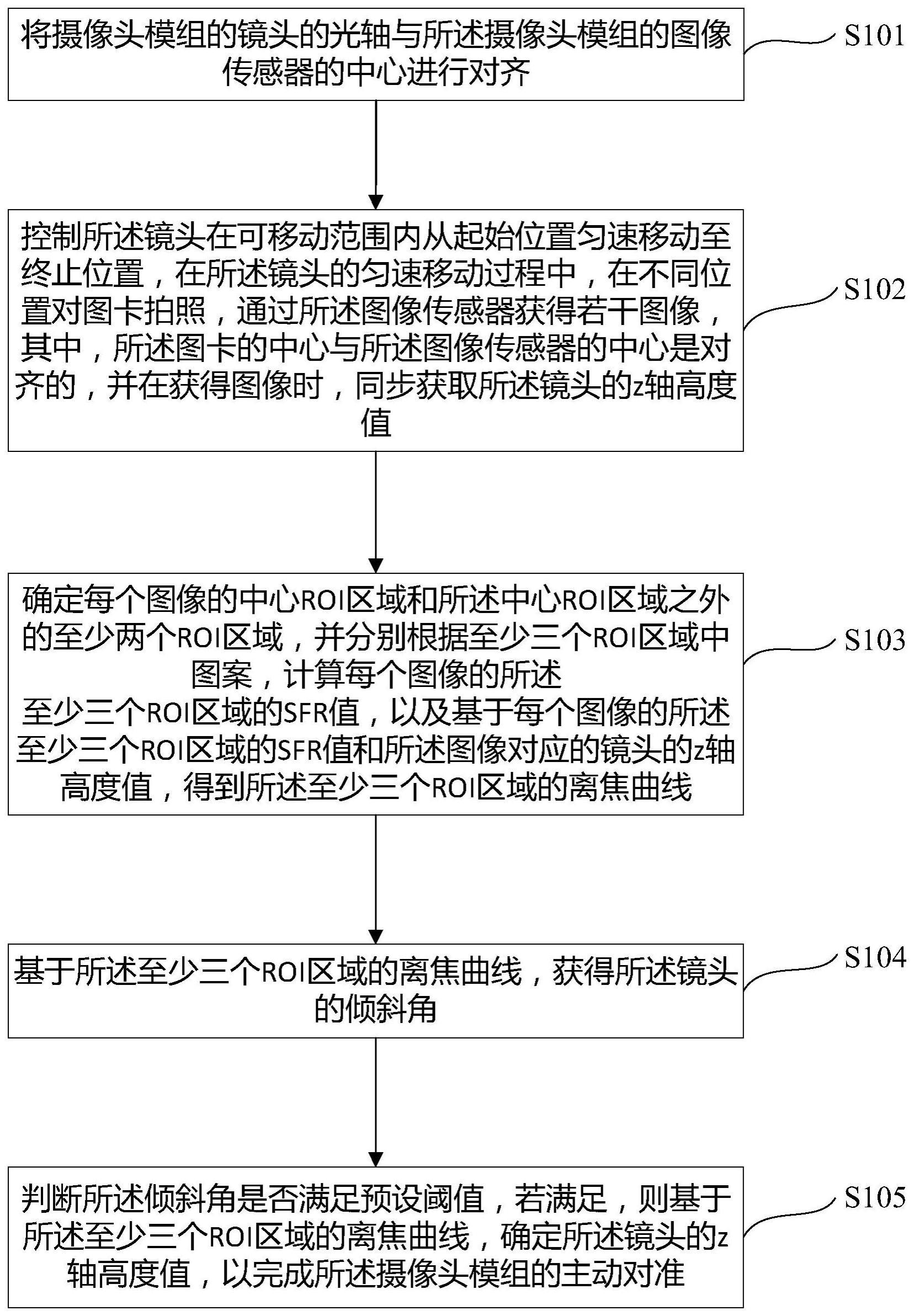
3、将摄像头模组的镜头的光轴与所述摄像头模组的图像传感器的中心进行对齐;
4、控制所述镜头在可移动范围内从起始位置匀速移动至终止位置,在所述镜头的匀速移动过程中,在不同位置对图卡拍照,通过所述图像传感器获得若干图像,其中,所述图卡的中心与所述图像传感器的中心是对齐的,并在获得图像时,同步获取所述镜头的z轴高度值;
5、确定每个图像的中心roi区域和所述中心roi区域之外的至少两个roi区域,并分别根据至少三个roi区域中图案,计算每个图像的所述至少三个roi区域的sfr值,以及基于每个图像的所述至少三个roi区域的sfr值和所述图像对应的镜头的z轴高度值,得到所述至少三个roi区域的离焦曲线;
6、基于所述至少三个roi区域的离焦曲线,获得所述镜头的倾斜角;
7、判断所述倾斜角是否满足预设阈值,若满足,则基于所述至少三个roi区域的离焦曲线,确定所述镜头的z轴高度值,以完成所述摄像头模组的主动对准。
8、可选地,其中,所述将摄像头模组的镜头的光轴与所述摄像头模组的图像传感器的中心进行对齐包括:
9、在所述摄像头模组的镜头的可移动范围内的任一位置,对图卡拍照,通过所述图像传感器,获得图像;
10、确定所述图像的中心roi区域中图案的中心点,并计算所述中心点与所述图像的中心的偏差;
11、基于所述偏差,对所述摄像头模组进行x轴和/或y轴补偿,以完成所述镜头的光轴与所述图像传感器的中心对齐。
12、可选地,其中,所述在不同位置对图卡拍照包括:
13、随机在不同位置对图卡拍照。
14、可选地,其中,所述在不同位置对图卡拍照包括:
15、在预设步长的倍数位置,对图卡拍照。
16、可选地,其中,所述基于所述至少三个roi区域的离焦曲线,获得所述镜头的倾斜角包括:
17、基于所述至少三个roi区域的离焦曲线,确定每个roi区域的离焦曲线的峰值点对应的z轴高度值和对应roi区域中图案的特征点的x/y轴坐标值;
18、根据每个roi区域的离焦曲线的峰值点对应的z轴高度值和对应roi区域中图案的特征点的x/y轴坐标值,进行平面拟合,得到拟合平面,将所述拟合平面与所述摄像头模组的图像传感器平面的夹角确定为所述镜头的倾斜角。
19、可选地,其中,所述根据每个roi区域的离焦曲线的峰值点对应的z轴高度值和对应roi区域中图案的特征点的x/y轴坐标值,进行平面拟合包括:
20、根据每个roi区域的离焦曲线的峰值点对应的z轴高度值和对应roi区域中图案的特征点的x/y坐标值,确定每个roi区域对应的空间特征点;
21、根据每个roi区域对应的空间特征点,进行平面拟合。
22、可选地,其中,所述roi区域中图案的特征点包括以下任一项:
23、roi区域中图案的质心;
24、roi区域中图案的中心点。
25、可选地,其中,所述基于所述至少三个roi区域的离焦曲线,确定所述镜头的z轴高度值包括:
26、基于所述至少三个roi区域的离焦曲线,确定每个roi区域的离焦曲线的峰值点对应的z轴高度值;
27、对每个roi区域的离焦曲线的峰值点对应的z轴高度值赋予权重后计算加权平均值,将所述加权平均值确定为所述镜头的z轴高度值。
28、可选地,其中,若所述倾斜角不满足预设阈值,所述一种用于摄像头模组主动对准的方法还包括:
29、基于所述倾斜角的偏差程度,对所述镜头进行倾斜角补偿,以及控制所述镜头复位至起始位置,重复上述步骤,直至获得的倾斜角满足预设阈值,基于当前获得的至少三个roi区域的离焦曲线,确定所述镜头的z轴高度值,以完成所述摄像头模组的主动对准。
30、可选地,提供了执行所述一种用于摄像头模组主动对准的方法的装置,其中,所述装置包括:
31、机台,治具,夹爪,电机,传动机构,图像采集卡,上位机,其中,
32、治具固定在机台上,用于固定摄像头模组;
33、夹爪一端夹紧所述摄像头模组的镜头,另一端与传动机构水平固定连接,所述传动机构在电机驱动下,带动所述夹爪沿z轴垂直移动,以及控制所述夹爪带动所述镜头沿x/y轴水平移动和/或旋转,其中,所述电机的编码器的编码数据与所述镜头的z轴高度值一一对应;
34、图像采集卡集成在上位机中,分别与所述摄像头模组的图像传感器、所述电机电性连接,当控制所述摄像头模组对图卡拍照时,获取所述图像传感器采集的图像,并获取所述电机的编码器的编码数据,以同步采集所述镜头的z轴高度值;
35、上位机用于控制所述图像采集卡获取图像和与图像对应的所述镜头的z轴高度值,根据图像的中心roi区域中图案的中心点,计算与所述图像的中心的光学中心偏差,根据计算得到的图像的中心roi区域和所述中心roi区域之外的至少两个roi区域的sfr值,得到至少三个roi区域的离焦曲线,确定所述镜头和所述图像传感器之间的倾斜角,确定所述镜头的最终定位z轴高度值,并输出信号,通过所述电机驱动所述传动机构,控制所述夹爪带动所述镜头沿x/y轴水平移动,以补偿光学中心偏差,控制所述夹爪带动所述镜头旋转,以进行倾斜角补偿,并控制所述夹爪垂直移动至所述镜头的最终定位z轴高度值对应的位置。
36、与现有技术相比,本技术提供了一种用于摄像头模组主动对准的方法及装置,其方法包括:将摄像头模组的镜头的光轴与所述摄像头模组的图像传感器的中心进行对齐;控制所述镜头在可移动范围内从起始位置匀速移动至终止位置,在所述镜头的匀速移动过程中,在不同位置对图卡拍照,通过所述图像传感器获得若干图像,其中,所述图卡的中心与所述图像传感器的中心是对齐的,并在获得图像时,同步获取所述镜头的z轴高度值;确定每个图像的中心roi区域和所述中心roi区域之外的至少两个roi区域,并分别根据至少三个roi区域中图案,计算每个图像的所述至少三个roi区域的sfr值,以及基于每个图像的所述至少三个roi区域的sfr值和所述图像对应的镜头的z轴高度值,得到所述至少三个roi区域的离焦曲线;基于所述至少三个roi区域的离焦曲线,获得所述镜头的倾斜角;判断所述倾斜角是否满足预设阈值,若满足,则基于所述至少三个roi区域的离焦曲线,确定所述镜头的z轴高度值,以完成所述摄像头模组的主动对准。通过该方法,可在摄像头模组的镜头匀速移动过程中同步完成对图卡的拍摄和镜头z轴位置的获取,缩短了摄像头模组主动对准的时间,提高了摄像头模组的生产效率。
- 还没有人留言评论。精彩留言会获得点赞!