一种基于主动控制的汽车车内低频道路噪声控制方法与流程
1.本发明涉及汽车nvh,具体涉及一种控制汽车车内低频道路噪声的方法。
背景技术:
2.汽车车内低频道路噪声的治理是汽车nvh控制的技术难题。其中低频敲鼓声是汽车车内低频道路噪声的一个典型案例。汽车低频敲鼓的机理主要为汽车车身与车内声学空腔之间产生的声振耦合现象。来自路面的激励通过汽车轮胎-悬架系统-车身进行传递,引起车身低频振动并向车内辐射类似敲鼓声的低频噪声。如果路面激励频率与车身共振频率接近时,车内敲鼓声会进一步放大,引起乘客不舒服的压耳感。目前对汽车低频敲鼓声的常用治理方法包括:方法1,在车身增加质量块或刚度以修改车身振动特性;方法2,在车身安装吸振器以耗散振动能量等。然而,在方法1中,采用在车身增加质量块不利于汽车轻量化,且通过在车身焊接加强筋等方法增加刚度对车身改动较大。在方法2中,在车身安装吸振器需要一定的安装空间,安装吸振器通常情况下会受到汽车结构设计的限制。
3.因此,在现有控制方法上,有必要设计一种新的汽车低频道路噪声,即低频敲鼓声的控制方法。
技术实现要素:
4.针对现有技术在控制方法上存在的问题,本发明提供一种控制汽车车内低频道路噪声的方法,目的是在无需对汽车车身做较大改动的情况下,有效降低外界激励引起的车身振动及声辐射,避免车身与车内声腔产生耦合共振。
5.本发明的技术方案如下:
6.本发明提出的控制汽车车内低频道路噪声的方法所依据的基本原理为:一个系统的响应特征(即传递函数)跟该系统的特征频率有关,通过主动控制方法修改一个系统的特征频率可以改变该系统的响应特征。
7.以下,首先对本发明所述的汽车车内低频道路噪声控制方法的理论原理与推导过程阐述如下:
8.将动态汽车的车身考虑成一个质量为m,阻尼为c,刚度为k的动态系统,受到外界激励f,其振动控制方程为
[0009][0010]
其中u为通过作动器额外施加的作用力。
[0011][0012]
其中,b为作动器的分布位置,g和f为与车身的振动位移响应与振动速度响应对应的增益,x(t)为测量得到的车身振动位移,为测量得到的车身振动速度;t为转置符号。
[0013]
合并方程(1)与(2)并进行拉普拉斯变换,得到车身的新的传递函数
[0014][0015]
施加控制之前,车身的传递函数为
[0016]
h(s)=(ms2+cs+k)-1
ꢀꢀꢀꢀ
(4)
[0017]
对比方程(3)与(4)可见,施加控制后车身的等效阻尼变为c+bf
t
,车身的等效刚度变为k+bgt。将施加控制后的车身传递函数用施加控制之前的传递函数h(s)来表示,可得
[0018][0019]
通过求解1+(g+sf)
t
h(s)b=0可得施加控制后的车身的共振频率μ。若施加控制之前的车身传递函数h(s)已知,通过设定作动器位置向量b与施加控制后的车身共振频率{μ1μ2···
μ
2n
}可以求得与车身振动位移与车身振动速度对应的增益g与f。
[0020]
上述关系满足
[0021]
(g+μkf)
t
h(μk)b=-1,k=1,2,
···
,2n
ꢀꢀ
(6)
[0022]
定义rk=h(μk)b得到
[0023][0024]
通过对g矩阵求逆可以得到与车身振动位移与车身振动速度对应的增益g与f。利用该控制方法,可以修改车身的传递函数,达到降低车身振动与车内噪声的目的。
[0025]
在实践中,外界激励与车身固有频率接近时,车身振动幅度会大幅提高,进而引起较明显的车内噪声。基于以上理论原理,本发明即提出一种主动控制方法,通过修改车身的传递函数,使车身在受到外界激励时,车身的振动幅度处于较低水平,此外,通过作动器施加的反馈力修改车身的共振频率,避免车身共振频率与车内声学空腔共振频率重叠。通过以上调节达到降低车内低频道路噪声的目的。
[0026]
具体地,本发明提出的控制汽车车内低频道路噪声的方法,主要包括如下包括步骤:
[0027]
步骤1,在在引起车内低频道路噪声的车身关键部位布置振动传感器,进行静态测试:在汽车上随机施加激励,测量并获取汽车车身上布置振动传感器位置的振动信号。
[0028]
步骤2,利用在车身上布置的测量点测得的振动信号频谱,获得车身的传递函数h(s),并分析出汽车车身的共振频率。
[0029]
步骤3,利用车身共振频率与车内声腔的共振频率差异不小于2hz的避频原则对车身的共振频率进行调整;根据车身共振频率的调整幅度与车身的传递函数计算出与车身振动位移与车身振动速度对应的增益g与f。
[0030]
步骤4,在汽车运行状态下,测量并获取汽车车身上传感器位置的振动位移及振动速度信号。通过将车身振动位移与车身振动速度乘以各自对应的增益计算出需要施加到车身的控制力:
[0031][0032]
其中,x(t)为测量得到的车身振动位移,为测量得到的车身振动速度;t为转置符号。
[0033]
步骤5,在汽车车身关键部位安装作动器,对车身施加反馈控制力fc=bu(t),达到修改汽车车身传递函数,进而控制汽车车内低频道路噪声的目的,其中b为反馈力的位置向量。
[0034]
根据本发明的实施例,所述步骤2是根据测量得到的车身振动信号的频谱h(ω),ω为频率,并对其进行拉普拉斯变换s=jω,得出车身的传递函数为h(s)。
[0035]
进一步地,所述根据对车身共振频率的调整幅度与车身的传递函数计算出与车身振动位移与车身振动速度对应的增益g与f具体是:利用测量到的车身振动信号分析出车身的共振频率;在外界激励频率接近该共振频率时,车身的振动幅度被放大,因此,车身共振频率为车身传递函数的极点,通过增加主动反馈控制的方法将车身原有的共振频率置换成新的频率,以此修改车身的传递函数,然后计算出对应的增益g与f。
[0036]
进一步地,修改车身的传递函数,是将车身原来的传递函数h(s)修改成车身新的传递函数:
[0037][0038]
b为作动器的分布位置,g和f为与车身测量点位置的振动位移响应与振动速度响应对应的增益,h(s)为施加控制之前的车身传递函数,为施加控制之后的车身传递函数,s=jω,ω为频率。
[0039]
根据本发明的实施例,根据如下公式计算出系统增益g与f:
[0040]
(g+μkf)
t
h(μk)b=-1,k=1,2,
…
,2n
[0041]
定义rk=h(μk)b得到
[0042][0043]
通过对g矩阵求逆可以得到与车身上传感器位置处的振动位移响应与振动速度响应对应的增益g与f。
[0044]
在本发明的一实施例中,所述作动器为一种可在市场上直接购买的压电堆作动器。来自轮胎与路面的激励通常会引起汽车背门振动,并与车内声学空腔产生共鸣现象,进而导致车内低频道路噪声。压电堆作动器可直接通过试验用强力胶粘接在汽车背门上,无需改动汽车原有结构。
[0045]
本发明具有以下优点:
[0046]
1、本方法通过修改车身的传递函数,使车身在受到外界激励时,车身的振动幅度处于较低水平,有效降低外界激励引起的车身振动及声辐射,避免车身与车内声腔产生耦合共振。
[0047]
2、与传统方法相比,该方法在有效降低汽车低频敲鼓声的同时对汽车无较大改动。
[0048]
3、本方法实施的过程简单易实现。
[0049]
4、本方法对汽车车身振动与车内噪声均有控制效果,可以对车身多个共振频率同时进行控制。或对车身某个特定共振频率进行选择性控制。
附图说明
[0050]
图1为本发明一实施例使用的简化汽车车身与车内空腔耦合模型。
[0051]
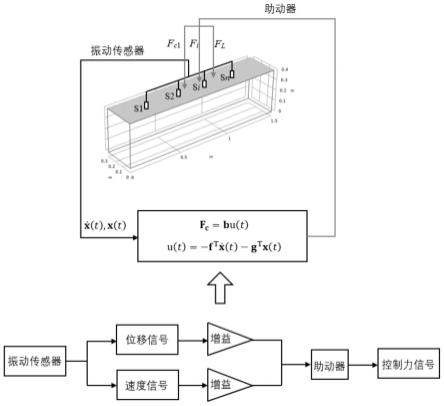
图2为本发明一实施例建立的汽车车内低频道路噪声控制示意图。
[0052]
图3为本发明一实施例中使用单个作动器控制前2阶模态示意图。
[0053]
图4本发明一实施例中使用单个作动器控制前2阶模态控制效果。(a)结构振动,(b)车内声压。
[0054]
图5为本发明一实施例中使用2个作动器控制前4阶模态示意图。
[0055]
图6为本发明实施例中使用2个作动器控制前4阶模态控制效果。(a)结构振动,(b)车内声压。
具体实施方式
[0056]
下面结合附图对本发明做进一步说明该方法在控制车内低频道路噪声时的操作布置与控制效果。
[0057]
如图2所示,实施本发明所述的方法需要硬件与控制算法,其中硬件部分包括数个振动传感器与作动器。振动传感器用于测量车身的振动位移与振动速度,作动器用于向车身输出控制力。振动传感器与作动器的安装位置根据需要控制的车身共振频率进行确定。一般来说,应避免将传感器与作动器布置在需控制的共振频率对应的车身模态的节点处。控制算法根据测量得到的车身振动位移与车身振动速度以及各自对应的增益计算出每个作动器的控制力,由作动器将控制力施加到车身,最终达到控制车身振动与噪声的目的。
[0058]
如图1所示,以下实施例中,将汽车车身与车内声学空腔的耦合作用简化为弹性板与声学空腔的耦合。弹性板模拟汽车车身,声学空腔模拟车内声学环境。
[0059]
控制汽车车内低频道路噪声的具体实施过程包括:
[0060]
首先,在引起车内低频道路噪声的车身关键部位布置振动传感器,测量车身上传感器位置处的振动加速度信号通过将振动加速度信号对时间积分,得到车身上传感器位置处的振动速度响应与振动位移响应x(t)。
[0061]
例如在图3所示,通过2个振动传感器测量弹性板上s1与s2位置的位移与速度响应,或图4所示通过4个振动传感器测量弹性板上s1,s2,s3,s4位置的位移与速度响应。
[0062]
离线下进行车身的传递函数测试。在车身上随机施加外界激励,测量得到车身的振动位移响应频谱h(ω),ω为频率,对其进行拉普拉斯变换s=jω,得出车身的传递函数为h(s)。
[0063]
接着,根据控制目标离线计算出与车身振动位移与车身振动速度对应的增益g与f。
[0064]
这里,是要利用基于极点置换的主动控制方法修改车身原有的共振频率,然后计算出该控制方法中对应的增益g与f。
[0065]
利用车身共振频率与车内声腔的共振频率差异不小于2hz的避频原则对车身的共振频率进行调整,根据对车身共振频率的调整幅度与车身的传递函数计算出与车身振动位移与车身振动速度对应的增益g与f。具体是:利用测量到的车身振动信号分析出车身的共振频率;在外界激励频率接近该共振频率时,车身的振动幅度被放大,因此,车身共振频率为车身传递函数的极点,通过增加主动反馈控制的方法将车身原有的共振频率置换成新的频率,以此修改车身的传递函数,然后计算出对应的增益g与f。
[0066]
这里修改车身原有的共振频率,即是将车身原有的传递函数修改成车身新的传递函数:
[0067][0068]
其中,b为作动器的分布位置,g和f为与车身振动位移响应与振动速度响应对应的增益。h(s)为施加控制之前的车身传递函数,为施加控制之后的车身传递函数,s=jω,ω为频率。
[0069]
然后,根据如下公式计算出对应的增益g与f:
[0070]
(g+μkf)
t
h(μk)b=-1,k=1,2,
…
,2n
[0071]
定义rk=h(μk)b得到
[0072][0073]
通过对g矩阵求逆可以得到与车身振动位移响应与振动速度响应对应的增益g与f。
[0074]
接着,在汽车运行状态下,测量并获取汽车车身上传感器位置的振动位移及振动速度信号;通过将车身振动位移与车身振动速度乘以各自对应的增益计算出需要施加到车身的控制力:
[0075]
最后,通过安装作动器在汽车车身关键部位,对车身施加反馈控制力fc=bu(t),实现对车内低频敲鼓声的控制。这里,作动器选择压电堆作动器,可直接通过试验用强力胶粘接在汽车背门上。
[0076]
以上方法,可以在修改车身传递函数过程中修改多个车身的共振频率,以达到对车身多个共振频率同时进行控制。具体通过在方程(g+μkf)
t
h(μk)b=-1中修改多组μk的值来实现。
[0077]
另外,以上方法也可以只修改特定的车身共振频率,达到对车身某个特定共振频率进行选择性控制。具体通过在方程(g+μkf)
t
h(μk)b=-1中修改某特定组的μk的值来实现。
[0078]
以下通过两个实际的控制案例来阐述该方法的对车内噪声的控制效果(虚线为控制前,实线为控制后)。
[0079]
1、控制案例1:
[0080]
控制描述:如图3所示,通过2个振动传感器测量弹性板上s1与s2位置的位移与速度响应,通过1个助动器在弹性板上s1位置施加控制力。
[0081]
控制目标:降低板的前2阶振动幅度与对应的空腔内噪声声压(141hz,157hz)。
[0082]
控制效果:如图4所示,板的第一阶振动模态导致的空腔内的声压减小9db。板的第2阶振动模态导致的空腔内的声压减小5db。
[0083]
2、控制案例2
[0084]
控制描述:如图5所示,通过4个振动传感器测量弹性板上s1,s2,s3,s4位置的位移与速度响应,通过2个助动器在弹性板上s1,s2位置施加控制力。
[0085]
控制目标:将弹性板的前4阶特征频率分别增高+3hz,+8hz,+6hz,+18hz。降低板的前4阶振动幅度与对应的空腔内噪声声压(141hz,157hz,184hz,222hz)。
[0086]
控制效果:如图6所示,板的前4阶振动模态导致的空腔内的声压减小,对应的频率右移。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1