结合自适应线谱增强和同步压缩变换的直升机声信号增强方法
本发明属于声信号增强和声源定位,特别是一种结合自适应线谱增强和同步压缩变换的直升机声信号增强方法。
背景技术:
1、直升机是一种典型的军民两用产品,广泛应用于运输、巡逻、旅游、救灾和局部打击等多个领域。但存在着直升机黑飞,以及利用直升机进行跨境走私非法药物、带来非法移民、进行非法活动的问题,因此如何检测、识别、定位和跟踪直升机越来越受到关注。但由于麦克风阵列采集远距离的直升机声信号信噪比低,使得直升机目标的探测变得非常困难。关键在于如何降低环境噪声对所期望直升机声信号的干扰,增强直升机的音频信息以提高信噪比。
2、目前,针对直升机声信号的信号增强算法主要有:1)基于小波变换的方法,此类方法性能和参数的选取有很大关系,目前尚没有较好的参数选取标准;2)基于高阶统计量的方法,但该方法需要大量的数据样本,计算复杂度高,对于低信噪比的信号效果较差;3)波束形成,需要知道目标方位,且增强性能受到阵元个数和阵列孔径的限制;4)同步压缩变换,主要应用于旋转机械系统故障诊断、超声导波信号分析等领域,但未应用到直升机声信号增强领域上来。
3、因此,需要一种方法来降低环境噪声和其他干扰对直升机声信号的影响,使得声探测设备在复杂背景噪声中提取信噪比较高的目标直升机声信号。
技术实现思路
1、本发明的目的在于针对上述现有技术存在的问题,提供一种结合自适应线谱增强和同步压缩变换的直升机声信号增强方法,在提高直升机声信号信噪比的同时,为提高直升机目标测向精度奠定基础。
2、实现本发明目的的技术解决方案为:一种结合自适应线谱增强和同步压缩变换的直升机声信号增强方法,所述方法包括以下步骤:
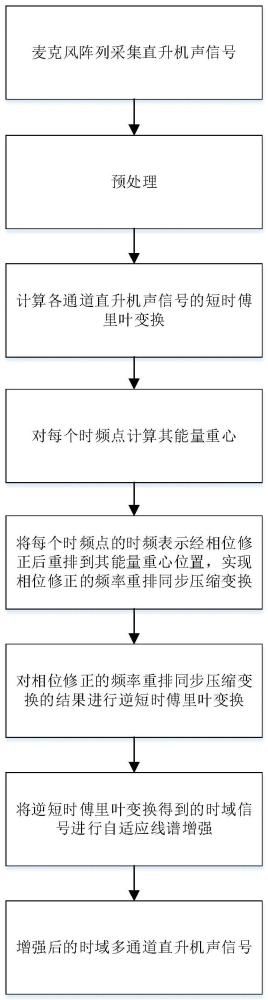
3、步骤1,利用麦克风阵列采集多通道直升机声信号,并进行预处理;
4、步骤2,对预处理后的直升机声信号进行相位修正的频率重排同步压缩变换;
5、步骤3,对相位修正的频率重排同步压缩变换后的频域结果进行逆短时傅里叶变换;
6、步骤4,对逆短时傅里叶变换后的多通道信号分别进行自适应线谱增强,得到增强后的时域多通道直升机声信号。
7、进一步地,步骤1所述预处理包括:
8、步骤1-1,针对直升机声信号,消除直流分量;
9、步骤1-2,进行分帧处理。
10、进一步地,步骤2所述对预处理后的直升机声信号进行相位修正的频率重排同步压缩变换,具体包括:
11、步骤2-1,对各通道直升机声信号进行加窗短时傅里叶变换,得到:
12、
13、
14、其中,xi[m]表示第i个麦克风在采样时刻m采集的直升机声信号即第i个通道在采样时刻m上的直升机声信号,i=1,2,…,m,m为麦克风阵列的麦克风数,g表示高斯窗函数,g′表示高斯窗函数的一阶导数,*表示共轭,n表示采样时刻,n=0,1,…,n-1,n为直升机声信号一帧内的采样点数,k表示频率,k=0,1,…,fs/2,fs为采样率,g*[m-n]表示在采样时刻m-n高斯窗的值取共轭的结果,(g′[m-n])*表示在采样时刻m-n高斯窗一阶导数的值取共轭的结果,表示第i个通道的直升机声信号以高斯窗作为窗函数进行傅里叶变换后在采样时刻n、频率k上即时频点[n,k]上的时频表示,表示第i个通道的直升机声信号以高斯窗的一阶导数作为窗函数进行傅里叶变换后在采样时刻n、频率k上的时频表示;
15、步骤2-2,针对各通道直升机声信号每个时频点,计算其瞬时频率算子,该瞬时频率算子表明各时频点所对应能量重心在时频平面上的位置:
16、
17、其中,控制阈值γ为正数,im[g]表示取虚部;表示第i个通道的直升机声信号以高斯窗作为窗函数进行傅里叶变换后在采样时刻n、频率k上的时频点对应的能量重心所在频率;
18、步骤2-3,在采样时刻n上,将每个时频点的时频表示为如式(4)进行相位修正后重排到其能量重心位置,具体包括:
19、时频点[n,k1]的时频表示为根据式(3)计算得该时频点对应的能量重心所在频率则其能量重心位置时频点[n,k0]的时频表示为其中a1[n,k1]和a0[n,k0]分别为时频点[n,k1]和[n,k0]的幅度,2πk1τ1和2πk0τ0分别为时频点[n,k1]和[n,k0]的相位,τ1和τ0分别为时频点[n,k1]和[n,k0]的时延;
20、对τ1进行如下修正,使得修正后时频点[n,k1]的相位变为2πk1τ:
21、
22、其中,angle[g]表示取相位;时频重排后时频点[n,k1]的时频表示变为而为其重心位置时频点[n,k0]的时频表示变为
23、进一步地,所述控制阈值γ取2.22×10-16。
24、进一步地,步骤3所述对相位修正的频率重排同步压缩变换后的频域结果进行逆短时傅里叶变换,具体公式为:
25、
26、其中,表示相位修正的频率重排同步压缩变换后采样时刻n、频率k上的时频表示,yfssti[n]为经相位修正的频率重排同步压缩变换后第i个通道的直升机声信号在采样时刻n的值。
27、进一步地,步骤4所述对逆短时傅里叶变换后的多通道信号分别进行自适应线谱增强,得到增强后的时域多通道直升机声信号,公式为:
28、yfsst+alei[n]=w[n]tyfssti[n] (6)
29、其中,yfsst+alei[n]为增强后的时域多通道直升机声信号在采样时刻n的值,自适应线谱增强器输入信号矢量yfssti[n]=[yfssti[n] yfssti[n-1] ... yfssti[n-l]]t,l为滤波器长度,yfssti[n]、yfssti[n-1]和yfssti[n-l]分别表示经相位修正的频率重排同步压缩变换后第i个通道的时域直升机声信号在采样时刻n、n-1和n-l的值,滤波器权重矢量由滤波器各抽头的权重wj[n]组成,j=0,1,...,l,滤波器权重矢量w[n]=[w0[n] w1[n] … wl[n]]t。
30、进一步地,滤波器权重矢量根据下式更新:
31、
32、其中,步长因子α用于对滤波器抽头权向量的增量幅值进行控制,c是常数,用于避免当||yfssti[n]||2太小时步长的值过大,采样时刻n上的误差信号e[n]=d[n]-yfssti[n],d[n]为当前输入信号即经相位修正的频率重排同步压缩变换后的时域直升机声信号在采样时刻n上的期望值。
33、进一步地,所述步长因子α的取值范围为(0,2)。
34、进一步地,将输入信号的延迟yfssti[n-m]送入自适应滤波器作为信号yfssti[n]的期望值d[n],m为延迟的采样点数。
35、本发明与现有技术相比,其显著优点为:
36、1)本发明通过结合相位修正的频率重排同步压缩变换和自适应线谱增强算法对直升机声信号进行增强,能够从复杂背景噪声中提取出更高信噪比的直升机声信号,大大提升了直升机声信号线谱能量与周围频率噪声能量的比值,可作为直升机目标检测、识别、测向与跟踪的前端处理。
37、2)本发明增强后的直升机声信号基于music算法进行doa估计,可得到更高的测向精度,实现在低信噪比下的直升机目标测向。
38、下面结合附图对本发明作进一步详细描述。
- 还没有人留言评论。精彩留言会获得点赞!