一种机器人语音智能交互系统
本发明涉及语音交互,尤其涉及一种机器人语音智能交互系统。
背景技术:
1、机器人语音智能交互系统通过对获取到的用户语音进行过滤,并对其的有效性进行分析,根据分析结果生成文本信息,根据文本信息对机器人的状态及输出内容进行控制,提高了机器人的语音识别效率。
2、中国专利公开号:cn108133701b公开了一种机器人语音交互的系统与方法,包括:当收到上层应用发出的语音识别请求时,对采集的音频信号进行语音识别,得到识别到的识别文本;上报所述识别文本,供所述上层应用进行界面展示;根据识别文本,得到第一语音操作指令;当第一语音操作指令为语义理解请求时,对所述识别文本进行语义理解,得到对应的语音指令;上报所述语音指令,供所述上层应用进行界面展示;根据语音指令,得到第二语音操作指令;当第二语音操作指令为语音合成请求时,对所述语音指令进行语音合成,并播放;由此可见,该方案在进行语音识别时仅对语音进行识别处理,未考虑到语音预处理及识别准确性的音素,存在机器人的语音识别效率低的问题。
技术实现思路
1、为此,本发明提供一种机器人语音智能交互系统,用以克服现有技术中机器人的语音识别效率低的问题。
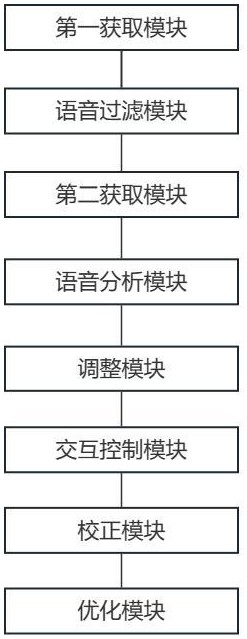
2、为实现上述目的,本发明提供一种机器人语音智能交互系统,所述系统包括,
3、第一获取模块,用以获取用户的语音信息;
4、语音过滤模块,用以根据获取的语音帧语音的分贝和用户的语音时长对获取的用户的语音进行过滤,并将过滤后的用户的语音生成音素;
5、第二获取模块,用以获取音素信息和分帧信息;
6、语音分析模块,用以根据获取的各音素的帧长对各音素的有效性进行分析,根据有效音素对文字进行识别,并生成文本信息;
7、调整模块,用以根据获取的用户的语音时长、音素数量、无效语音帧数量和语音帧数量对各音素的有效性的分析过程进行调整;
8、交互控制模块,用以根据生成的文本信息和预设关键词的匹配结果控制机器人的状态,并分析输出内容对输出内容进行输出;
9、校正模块,用以根据无效音素数量、音素数量和帧移时长对机器人状态的控制过程进行校正;
10、优化模块,用以根据将控制周期内机器人被开启后用户未操作的次数对下一控制周期对机器人的状态的控制过程进行优化。
11、进一步地,所述语音过滤模块将获取的语音帧语音的分贝ka与各预设分贝进行比对,并根据比对结果对获取的用户的语音进行过滤,其中:
12、当ka<b1或ka>b2时,所述语音过滤模块判定该语音帧无效,并对该语音帧进行过滤;
13、当b1≤ka≤b2时,所述语音过滤模块判定该语音帧有效,并根据有效语音帧生成音素;
14、其中,b1为预设最小分贝,b2为预设最大分贝,0<a≤t0/t1,t0为获取的用户的语音时长,t1为分帧时长,ka为第a个语音帧语音的分贝。
15、进一步地,所述语音分析模块设有音素分析单元,所述音素分析单元将各音素的帧长yy与各预设帧长进行比对,并根据比对结果对各音素的有效性进行分析,其中:
16、当yy<c1或yy>c2时,所述音素分析单元判定该音素无效;
17、当c1≤yy≤c2时,所述音素分析单元判定该音素有效;
18、其中,c1为预设最小帧长,c2为预设最大帧长。
19、进一步地,所述调整模块设有调节单元,所述调节单元将获取的用户的语音时长与当前语音的音素数量m进行比值计算,并将计算结果与预设语速系数进行比对,并根据比对结果对各音素有效性的分析过程进行调节,其中:
20、当t0/m≤d1时,所述调节单元判定该用户的语速快,并设置调节系数α1对预设帧长cc进行调节,设定α1=1-(d1-t0/m)/(d1+t0/m);
21、当d1<t0/m<d2时,所述调节单元判定该用户语速正常,不进行调节;
22、当t0/m≥d2时,所述调节单元判定该用户语速慢,并设置调节系数α2对预设帧长cc进行调节,设定α2=1+(t0/m-d2)/(d2+t0/m)。
23、进一步地,所述调整模块还设有修正单元,所述修正单元将获取的用户语音中的无效语音帧n0与语音帧数量进行比值计算,并将计算结果与预设异常阈值进行比对,根据比对结果对各音素有效性的分析过程的调节过程进行修正,其中:
24、当n0/n1<e1时,所述修正单元判定该用户语音的异常帧少,不进行修正;
25、当n0/n1≥e1时,所述修正单元判定该用户语音的异常帧多,并设置修正系数β对调节系数αx进行修正,设定β=1-(n0/n1-e1)/(n0/n1+e1),将修正后的调节系数αx设为αx’,设定αx’=αx×β,其中,n1=t0/t1。
26、进一步地,所述交互控制模块设有状态控制单元,所述状态控制单元将所述文本信息与预设开启关键词进行匹配,并根据匹配结果与文本信息的字节数z0对机器人的状态进行控制其中:
27、当文本信息与预设开启关键词匹配时,若z0≤z1,所述状态控制单元控制机器人开启,若z0>z1,所述状态控制单元不控制机器人开启;
28、当文本信息与预设开启关键词不匹配时,所述状态控制单元不控制机器人开启,其中,z0为文本信息的字节数,z1为预设字节数。
29、进一步地,所述交互控制模块还设有输出分析单元,当机器人开启后,所述输出分析单元将语音分析模块生成的文本信息与预设输出关键词进行匹配,并根据文本信息中预设输出关键词的种类f和预设输出关键词的历史匹配次数gf对机器人的输出内容进行分析,其中:
30、当f=0时,所述输出内容分析单元不对机器人的输出内容进行分析;
31、当f=1时,所述输出分析单元将该预设输出关键词所对应的内容进行输出;
32、当f>1时,所述输出分析单元根据冒泡排序法将各预设输出关键词的历史匹配次数gf按照从大到小的顺序进行排序,并将最大的预设输出关键词的历史匹配次数gf设为g0,并将历史匹配次数为g0的预设输出关键词所对应的内容进行输出。
33、进一步地,所述校正模块设有校正单元,所述校正单元将获取的用户语音中无效音素数量h0与音素数量进行比值计算,并将计算结果与预设音素异常系数p进行比对,根据比对结果对机器人的状态的控制过程进行校正,其中:
34、当h0/m≤p时,所述校正单元判定该用户语音音素异常数量正常,不进行校正;
35、当h0/m>p时,所述校正单元判定该用户语音音素异常数量多,并设置校正系数p对预设字节数z1进行校正,设定z1=1+(h0/m-p)/(h0/m-p),将校正后的预设字节数设为z1’,设定z1’=z1×p。
36、进一步地,所述校正模块还设有补偿单元,所述补偿单元将获取的帧移j0与各预设帧移进行比对,并根据比对结果对机器人的状态的控制过程的校正过程进行补偿,其中:
37、当j0≤j1时,所述补偿单元判定该帧移小,并设置补偿系数q1对校正系数p进行补偿,设定q1=1-(j1-j0)/(j1+j0);
38、当j1<j0<j2时,所述补偿单元判定该帧移正常,不进行校正;
39、当j0≥j2时,所述补偿单元判定该帧移大,并设置补偿系数q2对校正系数p进行补偿,设定q2=1+(j0-j2)/(j0+j2);
40、所述补偿单元根据补偿系数qq对校正系数p进行补偿,并将补偿后的校正系数设为p’,设定p’=p×qq,q=1,2;
41、其中,j1为预设最小帧移,j2为预设最大帧移。
42、进一步地,所述优化模块将控制周期内机器人被开启后用户未操作的次数v0与各预设异常次数进行比对,并根据比对结果对下一控制周期对机器人的状态的控制过程进行优化,其中:
43、当v0≤v1时,所述优化模块判定用户未操作的次数少,并设置优化系数γ1对下一控制周期的预设次数z1进行优化,设定γ1=1+(v1-v0)/(v1+v0);
44、当v1<v0<v2时,所述优化模块判定用户未操作的次数正常,不进行优化;
45、当v0≥v2时,所述优化模块判定用户未操作的次数多,并设置优化系数γ2对下一控制周期的预设次数z1进行优化,设定γ2=1-(v0-v2)/(v2+v0);
46、所述优化模块根据优化系数γi对下一控制周期的预设次数z1进行优化,并将优化后的下一控制周期的预设次数z1设为z1”,设定z1”=z1×γi,i=1,2。
47、与现有技术相比,本发明的有益效果在于,所述语音过滤模块通过设置预设分贝以提高语音帧有效性判断的准确性,进而提高对音素有效性判断的准确性,从而提高生成文本信息的准确性,最终提高了机器人的语音识别效率,所述音素分析单元通过设置预设帧长以提高对音素有效性判断的准确性,从而提高生成文本信息的准确性,最终提高了机器人的语音识别效率,所述调节单元通过设置预设语速系数以提高调节系数的准确性,以减少语速因素对音素有效性的影响,进而提高对音素有效性判断的准确性,从而提高生成文本信息的准确性,最终提高了机器人的语音识别效率,所述修正单元通过设置预设异常阈值以提高修正系数的准确性,进而提高调节系数的准确性,进而提高对音素有效性判断的准确性,从而提高生成文本信息的准确性,最终提高了机器人的语音识别效率,所述状态控制单元通过设置预设字节数以提高对机器人状态控制的准确性,从而减少机器人被误开启的次数,进而提高了机器人的语音识别效率,所述校正单元通过设置预设音素异常系数以提高校正系数的准确性,从而提高对机器人状态控制的准确性,进而减少机器人被误开启的次数,最终提高了机器人的语音识别效率,所述补偿单元通过设置预设帧移以提高补偿系数的准确性,进而提高校正系数的准确性,从而提高对机器人状态控制的准确性,进而减少机器人被误开启的次数,最终提高了机器人的语音识别效率,所述优化模块通过设置预设异常次数以提高优化系数的准确性,进而提高对机器人状态控制的准确性,进而减少机器人被误开启的次数,最终提高了机器人的语音识别效率。
- 还没有人留言评论。精彩留言会获得点赞!