一种追日型的风光互补路灯的制作方法
[0001]
本实用新型涉及路灯照明领域,具体为一种追日型的风光互补路灯。
背景技术:
[0002]
目前全世界的风光互补路灯都是采用固定支架技术,导致发电量低下影响了其在市场上的推广和应用,而公知的感应追踪技术需要依赖外部装置来确定光伏板倾角的技术复杂性导致其成本的高昂,根本无法在成本低廉的风光互补路灯上使用,这些现有技术更多地是追求学术上的价值,很难直接转化应用,只能停留在纸质的现有技术上。如何解决风光互补路灯不仅能够追日而且具有实用价值的问题,就存为风光互补路灯领域内亟待解决的技术难题。
技术实现要素:
[0003]
针对上述缺陷,本实用新型通过提供一种追日型的风光互补路灯,使得上述的技术难题得到了解决。
[0004]
为实现上述目的,本实用新型的技术方案为:
[0005]
一种追日型的风光互补路灯,其包含有灯杆、灯具、太阳能角度控制器、支柱、光伏板、风力发电机、电机组合体,追踪系统分为1纬度或2纬度追踪的两种不同类型,灯杆分为两段,上段是根支柱,其是一种智能电动柱,固定在下段的顶端上,其柱体主要由轴、t型空心管或直筒空心管所构成,t型空心管或直筒空心管固定在轴上随轴一起旋转而不能上下移动,灯具安装在支柱的下方,1根横梁其固定在支柱柱体上有两种方式,第一种方式是通过一个圆环支架固定在直筒空心管上,第二种方式是在t型空心管的两侧下垂支架,横梁螺栓固定在支架上,在1纬度追踪模式当中,是调节方位角,光伏板的顶端螺栓固定在横梁上,下端或中部采用一个三角形支架支撑成倾斜状态并固定在智能电动柱上,在2纬度追踪模式当中,一根空心管p,固定在安装有s个圆环或滚动轴承的横梁上,一根空心管p内安装有1或2个电机的组合体,电机组合体包含了电机、齿轮、电机机座,齿轮与电机的轴连接并固定在空心管内侧,电机安放在空心管p内但不与其内壁固定,电机固定在电机机座上,电机机座固定紧固构件上,空心管p的两端分别连接在紧固构件的转轮上,两端的紧固构件固定在支架上,支架固定于横梁上,光伏板的上端采用固定支架固定在空心管p上,光伏板上安装有安全绳,其安装方式有无卷绳器和有卷绳器的两种类型,无卷绳器类型是在光伏板的背面两侧的边框或中轴线上各安装一条带有凹形槽的梁,梁截面为多边形,开口部是上窄下宽,一条钢制链条或钢丝绳的安全绳,其上带有圆形或多边形扣件的一端卡扣在凹形槽梁内,另一端分别固定在所述横梁的两端或智能电动柱体上,有卷绳器的类型是把d个卷绳器固定在空心管p上,钢制链条或钢丝绳的安全绳,一端固定在卷绳器内,另一端固定在光伏板的背面两侧的边框或中轴线上,在t型空心管或直筒空心管的顶部安装1台风力发电机,风力发电机包含了水平轴和垂直轴两种不同类型,由此构建成一个1纬度或2维度的风光互补路灯,上述的智能电动柱的柱体是固定在机座上,其的驱动都是采用固定在机座内的电
机和机械传动机构的组合体来进行,光伏板角度的调节,将由安装有嵌入式的角度传感器的太阳能角度控制器,来进行控制,所述太阳能角度控制器,是利用时间计时来控制光伏板的角度发生改变的一种智能控制装置,其主要有主芯片、角度传感器、gps卫星定位或电子指南针、时钟芯片、蓝牙、电机驱动的模块,其特征在于:不需要光电传感装置,分别采用电机、支柱、光伏板固定或活动支架的不同组合体,构建成一个1纬度或2维度追踪的风光互补路灯,方位角和倾角的调节将采用时间计时,采用太阳能角度控制器来进行控制。
[0006]
本实用新型的一种追日型的风光互补路灯,提供的1纬度或2纬度无需光电传感器的追踪技术,是有别于公知的固定支架技术和感应式追踪技术的一种新型非感应式追踪技术,其技术简单、成本低、自损电量小,在光电和风电的转换率难以大幅度提高的当下,通过调节光伏板的角度,提高了其发电的效率,解决了风光互补路灯行业内所亟待解决的技术难题,即风光互补路灯不仅要能够追日,而且还要具有实用价值的技术难题,本实用新型的发电效率比目前固定安装模式的平均多增加60%左右。
附图说明
[0007]
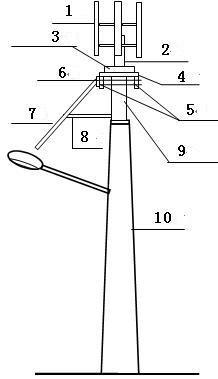
图1为风光互补路灯1维度追踪系统的正视图:符号1为垂直轴风机的叶片,符号2为垂直轴风机的转轴,符号3为垂直轴风机的发电机,符号4是t型空心管,符号5为t型空心管顶端两侧下垂的支架,符号6为横梁,符号7为固定支架的光伏板,符号8为三角形的固定支架,符号9为智能电动柱,符号10为灯杆的下端部分;图2为风光互补路灯2维度追踪系统的正视图:符号11为垂直轴风机,符号12为光伏板的固定在空心管p上的支架,符号13为圆环或滚动轴承,符号14为空心管p,符号15为紧固构件的支架,符号16为钢制链条或钢丝绳的安全绳,符号17为凹形槽梁。
具体实施方式
[0008]
为了加深对本实用新型的理解,下面将结合附图对本实用新型做进一步描述,该实施例仅用于解释本实用新型,并不构成对本实用新型保护范围的限定。
[0009]
角度的调节是一日之内三次或多次,2维度追踪的调节的时间段分为上午、正午、下午三个时段,一日之内的三次调节,上午时段,光伏板面朝东面,倾角最大,正午时段,光伏板是水平状;下午时段,光伏板面朝西面,倾角最大,每间隔e分钟进行一次方位角的调节,在e分钟内倾角调节f次,所述输入法当中的光伏板的最大倾角ψ的角度值按算术平均分成f次,每次调节的角度值为ψ/f,三个时间段内光伏板的朝向与1日之内三次调节的相同,在上午时段,每次新调节的角度值为ψ-j*ψ/f,j是整数的数字系列值,最小值为1,最大值为f;在下午时段,每次新调节的角度值为γ+ψ/f,γ是调节前一时刻的角度值,每次方位角进行调节时,倾角都已经归位到初始的位置,空心管p内的电机每次旋转的角度与上述每次倾角调节的角度相同。
[0010]
参阅图1为风光互补发电1维度追踪系统的正视图,垂直轴风机的叶片1通过固定支架固定在转轴2上,转轴2固定在发电机3上,发电机3固定在智能电动柱9的t型空心管4顶端的中央位置上,1根横梁6固定在t型空心管4顶端两侧下垂的支架5上,光伏板7顶端固定在横梁上,其下端或中部通过三角形固定支架8固定在智能电动柱9上,智能电动柱9固定在下端灯杆10的顶端上,由此构建成一个1纬度追踪的风光互补路灯,太阳能角度控制器电源
启动后,光伏板7被调节到当地时间其原有的位置,在预定时刻,将调节光伏板7方位角,方位角采用电子指南针模块来确定,太阳能角度控制器将根据电子指南针模块输出的信号得出太阳朝东或西的方位角,通过角度传感器由控制器控制智能电动柱9的电机转动,通过传动机构带动轴转动,轴转动的同时又带动t型空心管4同向转动,则光伏板7随同智能电动柱9转动到位,垂直轴风机的叶片1固定在转轴2上,转轴2固定在发电机3的顶盖上,发电机3通过底盖固定在t型空心管4的顶端,风叶1在风力的作用下发生旋转,则带动转轴2发生同向旋转,转轴2将带动发电机3顶盖转动的同时,发电机3内部的转子也发生转动切割定子,智能电动柱9与垂直轴风机转轴2的转动是各自独立进行。
[0011]
参阅图2为风光互补发电2维度追踪系统的正视图,垂直轴风机11安装在t型空心管4顶端,光伏板7固定安装于空心管p14上,空心管p14固定于滚动轴承或圆环13上,滚动轴承或圆环13固定于横梁6上,横梁6固定于t型空心管4的顶端两侧下垂的支架5上,电机和齿轮安装在空心管p14内,齿轮与电机的转轴相连,并固定于空心管p14内侧,电机通过电机座固定于紧固构件上,紧固构件固定安装在支架15上,支架15固定于横梁6上,在光伏板7背面两侧的边框或中轴线上各安装一条带有凹形槽的梁16,一条钢制链条或钢丝绳16,其上带有圆形或多边形的扣件的一端卡扣在凹形槽梁17内,另一端分别固定在所述横梁6的两端或智能电动柱体9上,由此构建成一个2纬度追踪的风光互补路灯,电源启动后太阳能角度控制器使得光伏板7归位到当时其该有的状态,在预定时刻,首先调节光伏板7的方位角,方位角的调节与上述1纬度追踪的相同,方位角调节到位后再调节光伏板7的倾角,倾角的调节无需驱动装置,是采用太阳能角度控制器控制空心管p14内电机的转动,电机转动的同时,带动光伏板7同向转动,从而使得光伏板7的倾角发生改变,空心管p14内电机每次旋转的角度与每次倾角调节的角度相同,角度具体的调节方式以及风机15的工作方式,参照0008~0009段,无卷绳器类型的安全绳16随着光伏板7的转动而在凹形槽17内上下滑动,其作用是避免极端天气下对光伏板7的损坏,而有卷绳器类型的安全绳16会随着空心管p14的转动而收缩或伸长,每次调节结束后,系统又自动归位到原有的状态,电源关闭后,电机自锁,光伏板7形成与地面垂直的状态。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1