一种双编码器锚定电机转动角度的设计方法及舞台灯与流程
本发明创造涉及舞台灯,尤其涉及一种双编码器锚定电机转动角度的设计方法及应用该设计方法的舞台灯。
背景技术:
1、因需要满足各式各样的舞台表演,现在人们对舞台灯光效果变化提出了更高的要求,因此需要舞台灯的电机与头部具有高精度和高准度配合从而使得舞台灯具备智能化、高效率地控制灯光效果;而传统舞台灯远远不能满足上述的要求,因为传统舞台灯还依然面临着掉电需要重新复位、容易产生累计误差和出现不能精准到位等情况,该问题是导致了舞台灯光效果差的直接原由。针对上述技术缺陷,我们研发了一种通过计算电机转动圈数并转化成转动角度的设计方法来精准控制并识别头部转动姿势的舞台灯。
技术实现思路
1、本发明创造为解决上述技术问题之一,提供一种双编码器锚定电机转动角度的设计方法及应用该设计方法的舞台灯,其具有高精度和高效率的智能控制,能自动记录或识别电机位置且不需要复位等多余动作的优点。
2、为解决上述技术问题,本发明创造提供如下技术方案:
3、一种双编码器锚定电机转动角度的设计方法,其包括有电机和齿轮机构,所述齿轮机构包括有齿轮a和齿轮b,所述电机的输出轴与齿轮b连接,所述电机驱动齿轮b带动齿轮a同步转动,齿轮a上设置有用于采集齿轮a绝对角度位置数据的第一编码器,所述电机或齿轮b上设置有用于采集电机或齿轮b绝对角度位置数据的第二编码器;该设计方法包括有如下步骤:
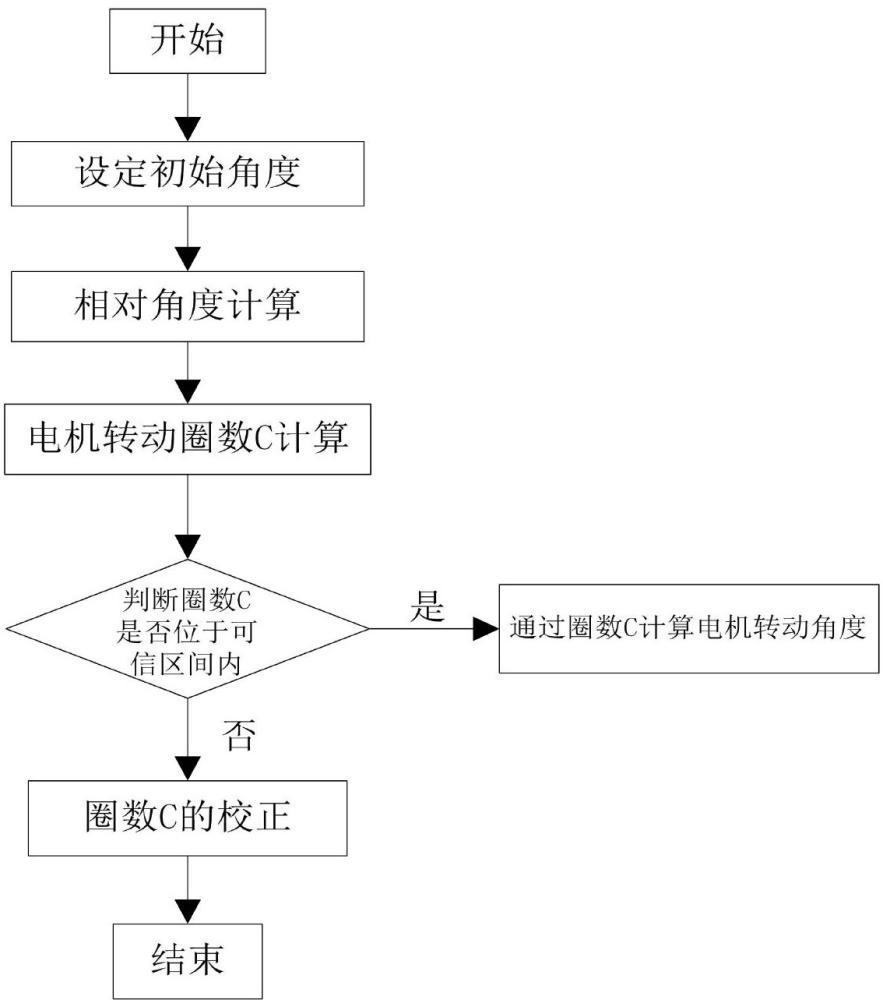
4、步骤1,设定初始角度:设定所述齿轮a的初始角度为,设定所述电机或齿轮b的初始角度为;
5、步骤2,相对角度计算:所述电机驱动齿轮b带动齿轮a同步转动后,所述第一编码器采集齿轮a的绝对角度为,所述齿轮a转动的相对角度为 (公式1);
6、所述第二编码器采集所述电机的绝对角度或齿轮b的绝对角度为,所述齿轮b转动的相对角度为(公式2);
7、步骤3,电机转动圈数c计算:设定齿轮a的齿数为,齿轮b的齿数为,其中,,若,圈数c计算公式为:(公式3-1);
8、若,圈数c计算公式为:(公式3-2);
9、因所述第一编码器和第二编码器上的传感器采集到的数据存在有误差,故设定每个编码器的误差值为±d,设定最大误差值为 ±dmax ,
10、根据公式(3-1),圈数c计算公式为:(公式4);
11、根据公式(3-2),圈数c计算公式为: (公式5);
12、由公式(3-1)和(公式4),或公式(3-2)和(公式5)所带来的误差影响offset(d),得如下公式:(公式6);
13、根据(公式6)所带来最大误差影响,得如下公式:(公式7);
14、其中,需满足,即可求得(公式3-1)或(公式3-2)中的圈数c。
15、进一步地,在步骤3中,设定所述不得超过电机转动1圈角度值百分比的误差,同时限定圈数c的范围,则圈数c有解。
16、进一步地,在步骤3中,设定圈数c的可信区间以判断求得的圈数c是否位于该可信区间内。
17、进一步地,所述不得超过电机转动1圈角度值20%的误差,即,所述圈数c限定的范围为。
18、进一步地,圈数c的可信区间为:round(c)-0.2≤c≤round(c)+0.2(不等式8);其中,round(c)为圈数c的数值进行四舍五入并取正整数所得。
19、进一步地,还包括有步骤4,圈数c的校正,若求得圈数c的数值不在可信区间内,则电机转动的圈数需要进行校正,校正步骤如下:
20、步骤4-1,设定和作为第一基准点;
21、步骤4-2,根据设定的电机脉冲数驱动电机转动后,通过第一编码器和第二编码器采集当前齿轮a、齿轮b所处的角度位置并记录为和,由数据、、和,根据(公式1)、(公式2)和(公式3-1),或(公式1)、(公式2)和(公式3-2);求得圈数c数值;
22、步骤4-3,判断圈数c数值是否位于可信区间内,如果是,说明该位置的圈数数值可信,完成校正;否则,将继续执行判断;
23、步骤4-4,根据设定的电机脉冲数继续驱动电机转动后,通过第一编码器和第二编码器再次采集齿轮a、齿轮b所处的当前角度位置并记录其角度值,求得圈数c数值,返回步骤4-3中;
24、步骤4-5,重复步骤4-3和4-4;
25、步骤4-6,直至电机转动到终点限位点或符合可信区间的某个角度位置的确定点,此时记录齿轮a、齿轮b所处的角度位置为和,将和设定为第二基准点;
26、步骤4-7,根据先前记录的齿轮a、齿轮b角度位置数值(、...)、(、...)分别与第二基准点、结合计算;或继续驱动电机转动后,重新记录齿轮a、齿轮b角度位置数值(、...)、(、...)并分别第二基准点、结合计算,求得圈数c数值,返回步骤4-3中。
27、进一步地,将round(c)值代入中获得电机的转动角度。
28、进一步地,所述初始角度为电机转动至初始限位点时的初始位置,其中,、由多次测试初始位置的角度取其平均值所获得。
29、一种包含所述设计方法的舞台灯,所述舞台灯包括有座部和转动设置在所述座部上的头部,所述座部上设置有电机和齿轮机构,所述齿轮机构包括有齿轮a、齿轮b和齿轮d,所述齿轮d用于与所述头部联动,所述齿轮b设置在所述电机输出轴上,所述电机上的齿轮b通过传动件带动齿轮a和齿轮d转动使得所述头部随齿轮d转动,所述齿轮a上设置有第一编码器,所述电机或齿轮b上设置有第二编码器,设定齿数d为,根据齿轮d和齿轮b的传动比和已求得电机转动圈数round(c),可得所述头部实际转动的角度,其计算公式为:(公式9)。
30、一种包含所述设计方法的舞台灯,所述舞台灯包括有座部和转动设置在所述座部上的头部,所述座部上设置有电机和齿轮机构,所述齿轮机构包括有齿轮a和齿轮b,所述齿轮a用于与所述头部联动,所述齿轮b设置在所述电机输出轴上,所述电机上的齿轮b通过传动件带动齿轮a转动使得所述头部随齿轮a转动,所述齿轮a上设置有第一编码器,所述电机或齿轮b上设置有第二编码器,根据已知的齿轮a和齿轮b之间的减速比和已求得电机转动圈数round(c),可得所述头部实际转动的角度,其计算公式为: (公式10)。
31、采用上述技术方案后,本发明创造至少具有如下有益效果:
32、通过该设计方法可实现舞台灯的电机高精度和高效率的智能控制,其还能自动记录或识别电机位置,从而实现舞台灯头部的精准控制以及记录和识别头部的姿势,掉电时不需要另花时间执行复位或其他的多余动作,以使得舞台灯能高效率的运作。
33、2、该设计方法还具有电机圈数校正的步骤,防止因受外界各种因素干扰导致计算圈数不精准的情况出现,例如,强电强磁的干扰导致了编码器采集的数据错误,或人为因素的干涉影响到机械正常的运转等因素,导致计算出来的圈数c数值偏离我们规定的范围,因此通过该校正步骤及时校正,以此保证电机精准地实时运作。
技术特征:
1.一种双编码器锚定电机转动角度的设计方法,其包括有电机和齿轮机构,所述齿轮机构包括有齿轮a和齿轮b,所述电机的输出轴与齿轮b连接,所述电机驱动齿轮b带动齿轮a同步转动,其特征在于,齿轮a上设置有用于采集齿轮a绝对角度位置数据的第一编码器,所述电机或齿轮b上设置有用于采集电机或齿轮b绝对角度位置数据的第二编码器;该设计方法包括有如下步骤:
2.据权利要求1所述的双编码器锚定电机转动角度的设计方法,其特征在于,在步骤3中,设定所述不得超过电机转动1圈角度值百分比的误差,同时限定圈数c的范围,则圈数c有解。
3.据权利要求2所述的双编码器锚定电机转动角度的设计方法,其特征在于,在步骤3中,设定圈数c的可信区间以判断求得的圈数c是否位于该可信区间内。
4.据权利要求3所述的双编码器锚定电机转动角度的设计方法,其特征在于,所述不得超过电机转动1圈角度值20%的误差,即,所述圈数c限定的范围为。
5.据权利要求4所述的双编码器锚定电机转动角度的设计方法,其特征在于,圈数c的可信区间为:round(c)-0.2≤c≤round(c)+0.2 (不等式8);其中,round(c)为圈数c的数值进行四舍五入并取正整数所得。
6.据权利要求3所述的双编码器锚定电机转动角度的设计方法,其特征在于,还包括有步骤4,圈数c的校正,若求得圈数c的数值不在可信区间内,则电机转动的圈数需要进行校正,校正步骤如下:
7.据权利要求5所述的双编码器锚定电机转动角度的设计方法,其特征在于,将round(c)值代入中获得电机的转动角度。
8.据权利要求1所述的双编码器锚定电机转动角度的设计方法,其特征在于,所述初始角度为电机转动至初始限位点时的初始位置,其中,、由多次测试初始位置的角度取其平均值所获得。
9.一种包含权利要求1-8任一所述设计方法的舞台灯,其特征在于,所述舞台灯包括有座部和转动设置在所述座部上的头部,所述座部上设置有电机和齿轮机构,所述齿轮机构包括有齿轮a、齿轮b和齿轮d,所述齿轮d用于与所述头部联动,所述齿轮b设置在所述电机输出轴上,所述电机上的齿轮b通过传动件带动齿轮a和齿轮d转动使得所述头部随齿轮d转动,所述齿轮a上设置有第一编码器,所述电机或齿轮b上设置有第二编码器,设定齿数d为,根据齿轮d和齿轮b的传动比和已求得电机转动圈数round(c),可得所述头部实际转动的角度,其计算公式为: (公式9)。
10.一种包含权利要求1-8任一所述设计方法的舞台灯,其特征在于,所述舞台灯包括有座部和转动设置在所述座部上的头部,所述座部上设置有电机和齿轮机构,所述齿轮机构包括有齿轮a和齿轮b,所述齿轮a用于与所述头部联动,所述齿轮b设置在所述电机输出轴上,所述电机上的齿轮b通过传动件带动齿轮a转动使得所述头部随齿轮a转动,所述齿轮a上设置有第一编码器,所述电机或齿轮b上设置有第二编码器,根据已知的齿轮a和齿轮b之间的减速比和已求得电机转动圈数round(c),可得所述头部实际转动的角度,其计算公式为:(公式10)。
技术总结
本发明创造涉及一种双编码器锚定电机转动角度的设计方法及舞台灯,包括有电机和齿轮机构,齿轮机构包括有齿轮A和齿轮B,齿轮A上设置有用于采集齿轮A绝对角度位置数据的第一编码器,电机或齿轮B上设置有用于采集电机或齿轮B绝对角度位置数据的第二编码器;该设计方法包括有如下步骤,步骤1设定初始角度,步骤2相对角度计算,步骤3电机转动圈数C计算,并根据减速比换算为舞台灯实际旋转角度;该设计方法实现是电机的高精度和高效率的智能控制,能自动记录或识别电机位置,从而实现舞台灯头部的精准控制以及记录和识别头部的姿势,掉电时不需要另花时间执行复位或其它的多余动作,以使得舞台灯能高效率的运作。
技术研发人员:陈其佑,周亮,黄河,梁耀日,杨胜飘,胡泽洲
受保护的技术使用者:广东熠日照明科技有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!