一种高精度框架结构的自动焊接设备的制作方法
1.本发明涉及进气机闸框焊接设备技术领域,具体是涉及一种高精度框架结构的自动焊接设备。
背景技术:
2.发动机是一种能够把其它形式的能转化为机械能的机器,包括如内燃机(往复活塞式发动机)、外燃机(斯特林发动机、蒸汽机等)、喷气发动机、电动机等。如内燃机通常是把化学能转化为机械能。发动机既适用于动力发生装置,也可指包括动力装置的整个机器(如:汽油发动机、航空发动机)。发动机最早诞生在英国,所以,发动机的概念也源于英语,它的本义是指那种“产生动力的机械装置”。
3.进气机匣框架结构为发动机的承力框架,目前有一中进气机闸框架如图1所示,包括:进气机匣;机匣内环,在进气机匣内侧设置,其外表面具有多个沿周向分布的连接凸出;多个固定支板,每个固定支板的一端为外端,另一端为内端;每个固定支板外端与进气机匣内侧焊接连接,内端对应与机闸内环焊接连接;
4.但是此种进气机闸框架在通过传统焊接设备下难以快速的进行加工,所以需要提出一种高精度框架结构的自动焊接设备,可以对进气机闸框架进行快速固定,便于对其进行针对型焊接,大大提高了工作效率。
技术实现要素:
5.为解决上述技术问题,提供一种高精度框架结构的自动焊接设备,本技术方案可以对进气机闸框架进行快速固定,便于对其进行针对型焊接,大大提高了工作效率。
6.为达到以上目的,本发明采用的技术方案为:
7.一种高精度框架结构的自动焊接设备,包括:
8.工作台,工作台的中心设置有圆孔;
9.第一限位机构和第二限位机构,第一限位机构和第二限位机构均设置于工作台的顶部,并且第一限位机构和第二限位机构环绕工作台的圆孔设置;
10.升起机构,设置于工作台的底部,升起机构的输出端位于工作台的圆孔处,并且升起机构的输出端高于工作台的顶部;
11.物料旋转机构,设置于升起机构的底部,并且物料旋转机构的输出端与升起机构的非工作部连接;
12.下压机构,设置于工作台的顶部;
13.张合驱动机构,设置于下压机构的输出端,张合驱动机构有多个输出端;
14.扩张组件,有多个,多个扩张组件的受力端与多个张合驱动机构的输出端连接。
15.优选的,第一限位机构包括:
16.第一弧形卡框,设置于工作台的顶部,并且第一弧形卡框半环绕工作台的圆孔设置;
17.第一弧形齿条,设置于第一弧形卡框内并与其滑动连接;
18.第一伺服电机,设置于工作台的顶部;
19.第一齿轮,设置于第一伺服电机的输出端,第一弧形齿条的外缘排列有齿条,并且第一弧形齿条的外缘与第一齿轮啮合。
20.优选的,第二限位机构包括:
21.第二弧形卡框,设置于工作台的顶部,并且第二弧形卡框半环绕工作台的圆孔设置;
22.第二弧形齿条,设置于第二弧形卡框内并与其滑动连接;
23.第二伺服电机,设置于工作台的顶部;
24.第二齿轮,设置于第二伺服电机的输出端,第二弧形齿条的外缘排列有齿条,并且第二弧形齿条的外缘与第二齿轮啮合。
25.优选的,升起机构包括:
26.圆帽块,圆帽块为圆帽形,圆帽块位于工作台的圆孔处,并且圆帽块的底部与工作台的顶部齐平;
27.第一导向杆,对称设置于圆帽块的底部;
28.第一气缸,设置于物料旋转机构的输出端,第一气缸的输出端贯穿物料旋转机构的输出端与圆帽块的底部连接,第一导向杆贯穿物料旋转机构的输出端并与其滑动连接。
29.优选的,物料旋转机构包括:
30.转动底板,设置于工作台底部的圆孔处并与其可转动连接,第一气缸设置于转动底板的底部,第一导向杆贯穿转动底板并与其滑动连接;
31.第三伺服电机,设置于工作台的底部;
32.第一皮带轮,设置于第三伺服电机的输出端;
33.第二皮带轮,套设于转动底板上并与其固定连接,第一皮带轮和第二皮带轮之间通过皮带传动连接。
34.优选的,下压机构包括:
35.底座,底座通过配套固定架设置于工作台的顶部;
36.第一同步轮和第二同步轮,第一同步轮和第二同步轮分别设置于底座的顶部和底部两端,并且第一同步轮和第二同步轮均与底座可转动连接;
37.工作块,设置于底座上并与其滑动连接,并且工作块与同步带的输出端传动连接,张合驱动机构设置于工作块上;
38.第四伺服电机,设置于底座上,并且第四伺服电机的输出端与第一同步轮的受力端连接。
39.优选的,张合驱动机构包括:
40.固定框,设置于工作块上;
41.导向板,设置于固定框的底部并与其固定连接,导向板上设有多个滑槽,多个扩张组件的均与导向板的滑槽滑动连接;
42.升降驱动组件,设置于固定框上,升降驱动组件的多个输出端与多个扩张组件的受力端连接。
43.优选的,升降驱动组件包括:
44.第二气缸,设置于固定框上;
45.铰接板,设置于第二气缸的输出端;
46.铰接杆,有多个,多个铰接杆的受力端均与导向板铰接,多个铰接杆的输出端分别与多个扩张组件的受力端铰接。
47.优选的,扩张组件包括:
48.固定板;
49.固定杆,固定杆的底端与固定板的顶部固定连接,固定杆的顶端与导向板的滑槽滑动连接,并且固定杆的顶端与铰接杆的输出端铰接;
50.花瓣块,设置于固定板的底部;
51.第一弹性组件和第二弹性组件,第一弹性组件和第二弹性组件对称设置于花瓣块的两侧。
52.优选的,第一弹性组件和第二弹性组件的结构一致,第一弹性组件包括:
53.背板,设置于花瓣块的一侧;
54.套筒,对称设置于背板上;
55.推板;
56.插杆,对称设置于推板上,插杆贯穿套筒并与其滑动连接;
57.弹簧,设置于套筒内,并且弹簧的两端分别抵触背板和推板。
58.本发明与现有技术相比具有的有益效果是:如图1所示,进气机闸框架包括有进气机闸、机闸内环和固定支板,机闸内环在进气机闸轴心设置,其外表面具有多个沿周向分布的连接凸出;多个固定支板,每个固定支板的一端为外端,另一端为内端;每个固定支板外端与进气机闸焊接连接,内端对应与机闸内环焊接连接,首先第一限位机构和第二限位机构同时开始工作,第一限位机构和第二限位机构的输出端同时伸出,通过第一限位机构和第二限位机构的输出端连成圆形框,工作人员将进气机闸放置于工作台的顶部,此时工作台位于圆形框中,并对进气机闸的位置进行限位,然后工作人员将机闸内环放置于工作台的顶部并套设于升起机构的输出端上,下压机构开始工作,下压机构的输出端驱动张合驱动机构开始下降,张合驱动机构带动多个扩张组件随其下降,直至多个扩张组件紧贴于工作台的顶部,此时多个扩张组件呈花瓣张开状,每个扩张组件之间的距离与固定支板的宽度一致,然后工作人员将多个固定支板放置于多个扩张组件之间,并将每个固定支板的两端分别贴合进气机闸的内缘和卡入机闸内环的外缘的凸块上,然后张合驱动机构开始工作,张合驱动机构的输出端驱动多个扩张组件向机闸内环的轴心靠近,通过多个扩张组件对每个固定支板之间的位置进行限制,此时工作人员操作电焊机,通过电焊机对每个固定支板的外端与进气机闸的内缘焊接,以及每个固定支板的内端与机闸内环的凸块焊接,此时进气机闸框架的顶面焊接完成,张合驱动机构再次工作,张合驱动机构的多个输出端带动多个扩张组件再次张开,下压机构再次工作,下压机构的输出端带动张合驱动机构和扩张组件进行上升复位,升起机构开始工作,升起机构的输出端推动进气机闸框架上升,工作人员将进气机闸框架底部固定支板的两端进行焊接,在每焊接一个固定支板后,物料旋转机构便通过升起机构带动进气机闸框架转动一定角度,工作人员可以原地待命再对下一处固定支板进行焊接,直至两面焊接完成后,工作人员将进气机闸框架从升起机构的输出端去取下;
59.1、通过张合驱动机构和扩张组件的设置,可以将进气机闸框架进行快速固定和引导拼接;
60.2、通过本设备的设置,可以对进气机闸框架进行快速固定,便于对其进行针对型焊接,大大提高了工作效率。
附图说明
61.图1为进气机闸框架的立体结构示意图;
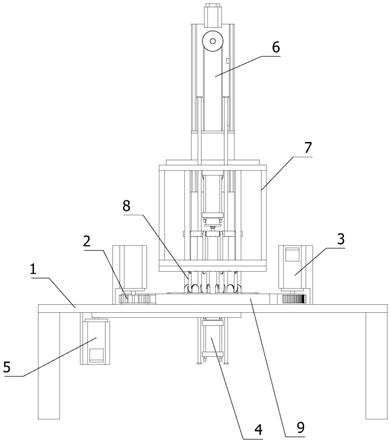
62.图2为本发明的主视图;
63.图3为本发明的工作台、第一限位机构和第二限位机构的立体结构示意图一;
64.图4为本发明的工作台、第一限位机构和第二限位机构的立体结构示意图二;
65.图5为本发明的工作台、升起机构和物料旋转机构的内部结构示意图;
66.图6为本发明的下压机构的立体结构示意图;
67.图7为本发明的张合旋转机构和扩张组件的立体结构示意图一;
68.图8为本发明的张合旋转机构和扩张组件的立体结构示意图二;
69.图9为本发明的扩张组件的立体结构示意图;
70.图10为本发明的花瓣块、第一弹性组件和第二弹性组件的内部结构示意图。
71.图中标号为:
[0072]1‑
工作台;
[0073]2‑
第一限位机构;2a
‑
第一弧形卡框;2b
‑
第一弧形齿条;2c
‑
第一伺服电机;2d
‑
第一齿轮;
[0074]3‑
第二限位机构;3a
‑
第二弧形卡框;3b
‑
第二弧形齿条;3c
‑
第二伺服电机;3d
‑
第二齿轮;
[0075]4‑
升起机构;4a
‑
圆帽块;4b
‑
第一导向杆;4c
‑
第一气缸;
[0076]5‑
物料旋转机构;5a
‑
转动底板;5b
‑
第三伺服电机;5c
‑
第一皮带轮;5d
‑
第二皮带轮;
[0077]6‑
下压机构;6a
‑
底座;6b
‑
第一同步轮;6c
‑
第二同步轮;6d
‑
工作块;6e
‑
第四伺服电机;
[0078]7‑
张合驱动机构;7a
‑
固定框;7b
‑
导向板;7c
‑
升降驱动组件;7c1
‑
第二气缸;7c2
‑
铰接板;7c3
‑
铰接杆;
[0079]8‑
扩张组件;8a
‑
固定板;8b
‑
固定杆;8c
‑
花瓣块;8d
‑
第一弹性组件;8d1
‑
背板;8d2
‑
套筒;8d3
‑
推板;8d4
‑
插杆;8d5
‑
弹簧;8e
‑
第二弹性组件;
[0080]9‑
进气机闸框架;9a
‑
进气机闸;9b
‑
机闸内环;9c
‑
固定支板。
具体实施方式
[0081]
以下描述用于揭露本发明以使本领域技术人员能够实现本发明。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。
[0082]
参照图1至图2所示,一种高精度框架结构的自动焊接设备,包括:
[0083]
工作台1,工作台1的中心设置有圆孔;
[0084]
第一限位机构2和第二限位机构3,第一限位机构2和第二限位机构3均设置于工作
台1的顶部,并且第一限位机构2和第二限位机构3环绕工作台1的圆孔设置;
[0085]
升起机构4,设置于工作台1的底部,升起机构4的输出端位于工作台1的圆孔处,并且升起机构4的输出端高于工作台1的顶部;
[0086]
物料旋转机构5,设置于升起机构4的底部,并且物料旋转机构5的输出端与升起机构4的非工作部连接;
[0087]
下压机构6,设置于工作台1的顶部;
[0088]
张合驱动机构7,设置于下压机构6的输出端,张合驱动机构7有多个输出端;
[0089]
扩张组件8,有多个,多个扩张组件8的受力端与多个张合驱动机构7的输出端连接;
[0090]
如图1所示,进气机闸框架9包括有进气机闸9a、机闸内环9b和固定支板9c,机闸内环9b在进气机闸9a轴心设置,其外表面具有多个沿周向分布的连接凸出;多个固定支板9c,每个固定支板9c的一端为外端,另一端为内端;每个固定支板9c外端与进气机闸9a焊接连接,内端对应与机闸内环9b焊接连接,首先第一限位机构2和第二限位机构3同时开始工作,第一限位机构2和第二限位机构3的输出端同时伸出,通过第一限位机构2和第二限位机构3的输出端连成圆形框,工作人员将进气机闸9a放置于工作台1的顶部,此时工作台1位于圆形框中,并对进气机闸9a的位置进行限位,然后工作人员将机闸内环9b放置于工作台1的顶部并套设于升起机构4的输出端上,下压机构6开始工作,下压机构6的输出端驱动张合驱动机构7开始下降,张合驱动机构7带动多个扩张组件8随其下降,直至多个扩张组件8紧贴于工作台1的顶部,此时多个扩张组件8呈花瓣张开状,每个扩张组件8之间的距离与固定支板9c的宽度一致,然后工作人员将多个固定支板9c放置于多个扩张组件8之间,并将每个固定支板9c的两端分别贴合进气机闸9a的内缘和卡入机闸内环9b的外缘的凸块上,然后张合驱动机构7开始工作,张合驱动机构7的输出端驱动多个扩张组件8向机闸内环9b的轴心靠近,通过多个扩张组件8对每个固定支板9c之间的位置进行限制,此时工作人员操作电焊机,通过电焊机对每个固定支板9c的外端与进气机闸9a的内缘焊接,以及每个固定支板9c的内端与机闸内环9b的凸块焊接,此时进气机闸框架9的顶面焊接完成,张合驱动机构7再次工作,张合驱动机构7的多个输出端带动多个扩张组件8再次张开,下压机构6再次工作,下压机构6的输出端带动张合驱动机构7和扩张组件8进行上升复位,升起机构4开始工作,升起机构4的输出端推动进气机闸框架9上升,工作人员将进气机闸框架9底部固定支板9c的两端进行焊接,在每焊接一个固定支板9c后,物料旋转机构5便通过升起机构4带动进气机闸框架9转动一定角度,工作人员可以原地待命再对下一处固定支板9c进行焊接,直至两面焊接完成后,工作人员将进气机闸框架9从升起机构4的输出端去取下。
[0091]
如图3所示第一限位机构2包括:
[0092]
第一弧形卡框2a,设置于工作台1的顶部,并且第一弧形卡框2a半环绕工作台1的圆孔设置;
[0093]
第一弧形齿条2b,设置于第一弧形卡框2a内并与其滑动连接;
[0094]
第一伺服电机2c,设置于工作台1的顶部;
[0095]
第一齿轮2d,设置于第一伺服电机2c的输出端,第一弧形齿条2b的外缘排列有齿条,并且第一弧形齿条2b的外缘与第一齿轮2d啮合;
[0096]
第一限位机构2开始工作,第一伺服电机2c的输出端驱动第一齿轮2d转动,第一齿
轮2d带动第一弧形齿条2b沿第一弧形卡框2a的引导伸出,通过第一限位机构2和第二限位机构3的输出端连接成圆形框。
[0097]
如图4所示第二限位机构3包括:
[0098]
第二弧形卡框3a,设置于工作台1的顶部,并且第二弧形卡框3a半环绕工作台1的圆孔设置;
[0099]
第二弧形齿条3b,设置于第二弧形卡框3a内并与其滑动连接;
[0100]
第二伺服电机3c,设置于工作台1的顶部;
[0101]
第二齿轮3d,设置于第二伺服电机3c的输出端,第二弧形齿条3b的外缘排列有齿条,并且第二弧形齿条3b的外缘与第二齿轮3d啮合;
[0102]
第二限位机构3开始工作,第二伺服电机3c的输出端驱动第二齿轮3d转动,第二齿轮3d带动第二弧形齿条3b沿第二弧形卡框3a的引导伸出,通过第一限位机构2和第二限位机构3的输出端连接成圆形框。
[0103]
如图5所示升起机构4包括:
[0104]
圆帽块4a,圆帽块4a为圆帽形,圆帽块4a位于工作台1的圆孔处,并且圆帽块4a的底部与工作台1的顶部齐平;
[0105]
第一导向杆4b,对称设置于圆帽块4a的底部;
[0106]
第一气缸4c,设置于物料旋转机构5的输出端,第一气缸4c的输出端贯穿物料旋转机构5的输出端与圆帽块4a的底部连接,第一导向杆4b贯穿物料旋转机构5的输出端并与其滑动连接;
[0107]
圆帽块4a的帽顶穿过机闸内环9b中间,机闸内环9b的底部被圆帽块4a的帽檐处承载,第一气缸4c开始工作,第一气缸4c的输出端推动圆帽块4a上升,机闸内环9b带动整个进气机闸框架9随圆帽块4a进行上升,第一导向杆4b用于对圆帽块4a的移动方向进行引导,以及当物料旋转机构5的输出端转动时通过第一导向杆4b带动圆帽块4a转动。
[0108]
如图5所示物料旋转机构5包括:
[0109]
转动底板5a,设置于工作台1底部的圆孔处并与其可转动连接,第一气缸4c设置于转动底板5a的底部,第一导向杆4b贯穿转动底板5a并与其滑动连接;
[0110]
第三伺服电机5b,设置于工作台1的底部;
[0111]
第一皮带轮5c,设置于第三伺服电机5b的输出端;
[0112]
第二皮带轮5d,套设于转动底板5a上并与其固定连接,第一皮带轮5c和第二皮带轮5d之间通过皮带传动连接;
[0113]
物料旋转机构5开始工作,第三伺服电机5b的输出端带动第一皮带轮5c转动,第一皮带轮5c通过皮带带动第二皮带轮5d转动,第二皮带轮5d带动转动底板5a转动,转动底板5a通过第三伺服电机5b带动圆帽块4a转动。
[0114]
如图6所示下压机构6包括:
[0115]
底座6a,底座6a通过配套固定架设置于工作台1的顶部;
[0116]
第一同步轮6b和第二同步轮6c,第一同步轮6b和第二同步轮6c分别设置于底座6a的顶部和底部两端,并且第一同步轮6b和第二同步轮6c均与底座6a可转动连接;
[0117]
工作块6d,设置于底座6a上并与其滑动连接,并且工作块6d与同步带的输出端传动连接,张合驱动机构7设置于工作块6d上;
[0118]
第四伺服电机6e,设置于底座6a上,并且第四伺服电机6e的输出端与第一同步轮6b的受力端连接;
[0119]
下压机构6开始工作,第四伺服电机6e的输出端带动第一同步轮6b转动,第一同步轮6b通过同步带带动工作块6d向下移动,张合驱动机构7随第一同步轮6b向下移动,底座6a用于固定支撑,第二同步轮6c用于支撑同步带和配合转动。
[0120]
如图7所示张合驱动机构7包括:
[0121]
固定框7a,设置于工作块6d上;
[0122]
导向板7b,设置于固定框7a的底部并与其固定连接,导向板7b上设有多个滑槽,多个扩张组件8的均与导向板7b的滑槽滑动连接;
[0123]
升降驱动组件7c,设置于固定框7a上,升降驱动组件7c的多个输出端与多个扩张组件8的受力端连接;
[0124]
第一同步轮6b带动固定框7a下降,直至多个扩张组件8贴近于工作台1的顶部,升降驱动组件7c的多个输出端带动多个扩张组件8沿导向板7b向机闸内环9b的轴心靠近,通过多个扩张组件8对每个固定支板9c之间的位置进行限制。
[0125]
如图8所示升降驱动组件7c包括:
[0126]
第二气缸7c1,设置于固定框7a上;
[0127]
铰接板7c2,设置于第二气缸7c1的输出端;
[0128]
铰接杆7c3,有多个,多个铰接杆7c3的受力端均与导向板7b铰接,多个铰接杆7c3的输出端分别与多个扩张组件8的受力端铰接;
[0129]
升降驱动组件7c开始工作,第二气缸7c1的输出端带动导向板7b上升,导向板7b带动多个铰接杆7c3的受力端互相靠近,多个铰接杆7c3带动多个扩张组件8沿导向板7b向机闸内环9b的轴心靠近。
[0130]
如图9所示扩张组件8包括:
[0131]
固定板8a;
[0132]
固定杆8b,固定杆8b的底端与固定板8a的顶部固定连接,固定杆8b的顶端与导向板7b的滑槽滑动连接,并且固定杆8b的顶端与铰接杆7c3的输出端铰接;
[0133]
花瓣块8c,设置于固定板8a的底部;
[0134]
第一弹性组件8d和第二弹性组件8e,第一弹性组件8d和第二弹性组件8e对称设置于花瓣块8c的两侧;
[0135]
固定板8a和固定杆8b用于固定支撑,当铰接杆7c3带动固定杆8b沿导向板7b的滑槽移动,导向板7b带动花瓣块8c靠近机闸内环9b的轴心处,通过第一弹性组件8d和第二弹性组件8e将两侧的固定支板9c撑紧。
[0136]
如图10所示第一弹性组件8d和第二弹性组件8e的结构一致,第一弹性组件8d包括:
[0137]
背板8d1,设置于花瓣块8c的一侧;
[0138]
套筒8d2,对称设置于背板8d1上;
[0139]
推板8d3;
[0140]
插杆8d4,对称设置于推板8d3上,插杆8d4贯穿套筒8d2并与其滑动连接;
[0141]
弹簧8d5,设置于套筒8d2内,并且弹簧8d5的两端分别抵触背板8d1和推板8d3;
[0142]
第一弹性组件8d用于固定支撑,通过弹簧8d5推动插杆8d4,推板8d3沿套筒8d2移动,通过花瓣块8c两侧的推板8d3将花瓣块8c两侧固定支板9c撑紧。
[0143]
本发明的工作原理:如图1所示,进气机闸框架9包括有进气机闸9a、机闸内环9b和固定支板9c,机闸内环9b在进气机闸9a轴心设置,其外表面具有多个沿周向分布的连接凸出;多个固定支板9c,每个固定支板9c的一端为外端,另一端为内端;每个固定支板9c外端与进气机闸9a焊接连接,内端对应与机闸内环9b焊接连接,首先第一限位机构2和第二限位机构3同时开始工作,第一伺服电机2c的输出端驱动第一齿轮2d转动,第一齿轮2d带动第一弧形齿条2b沿第一弧形卡框2a的引导伸出,第二伺服电机3c的输出端驱动第二齿轮3d转动,第二齿轮3d带动第二弧形齿条3b沿第二弧形卡框3a的引导伸出,通过第一限位机构2和第二限位机构3的输出端连接成圆形框,工作人员将进气机闸9a放置于工作台1的顶部,此时工作台1位于圆形框中,并对进气机闸9a的位置进行限位,然后工作人员将机闸内环9b放置于工作台1的顶部并套设于升起机构4的圆帽块4a上,下压机构6开始工作,第四伺服电机6e的输出端带动第一同步轮6b转动,第一同步轮6b通过同步带带动工作块6d向下移动,张合驱动机构7随第一同步轮6b向下移动,第一同步轮6b带动张合驱动机构7开始下降,张合驱动机构7带动多个扩张组件8随其下降,直至多个扩张组件8紧贴于工作台1的顶部,此时多个扩张组件8呈花瓣张开状,每个扩张组件8之间的距离与固定支板9c的宽度一致,然后工作人员将多个固定支板9c放置于多个扩张组件8之间,并将每个固定支板9c的两端分别贴合进气机闸9a的内缘和卡入机闸内环9b的外缘的凸块上,然后张合驱动机构7开始工作,升降驱动组件7c的多个输出端带动多个扩张组件8沿导向板7b向机闸内环9b的轴心靠近,通过第一弹性组件8d和第二弹性组件8e将两侧的固定支板9c撑紧,此时工作人员操作电焊机,通过电焊机对每个固定支板9c的外端与进气机闸9a的内缘焊接,以及每个固定支板9c的内端与机闸内环9b的凸块焊接,此时进气机闸框架9的顶面焊接完成,张合驱动机构7再次工作,张合驱动机构7的多个输出端带动多个扩张组件8再次张开,下压机构6再次工作,下压机构6的输出端带动张合驱动机构7和扩张组件8进行上升复位,升起机构4开始工作,第一气缸4c开始工作,第一气缸4c的输出端推动圆帽块4a上升,机闸内环9b带动整个进气机闸框架9随圆帽块4a进行上升,工作人员将进气机闸框架9底部固定支板9c的两端进行焊接,在每焊接一个固定支板9c后,物料旋转机构5便通过升起机构4带动进气机闸框架9转动一定角度,工作人员可以原地待命再对下一处固定支板9c进行焊接,直至两面焊接完成后,工作人员将进气机闸框架9从升起机构4的输出端去取下。
[0144]
本装置通过以下步骤实现本发明的功能,进而解决了本发明提出的技术问题:
[0145]
步骤一、第一限位机构2和第二限位机构3同时开始工作,第一限位机构2和第二限位机构3的输出端同时伸出,通过第一限位机构2和第二限位机构3的输出端连成圆形框;
[0146]
步骤二、工作人员将进气机闸9a放置于工作台1的顶部,此时工作台1位于圆形框中,并对进气机闸9a的位置进行限位;
[0147]
步骤三、工作人员将机闸内环9b放置于工作台1的顶部并套设于升起机构4的输出端上;
[0148]
步骤四、下压机构6开始工作,下压机构6的输出端驱动张合驱动机构7开始下降,张合驱动机构7带动多个扩张组件8随其下降,直至多个扩张组件8紧贴于工作台1的顶部,此时多个扩张组件8呈花瓣张开状,每个扩张组件8之间的距离与固定支板9c的宽度一致,
然后工作人员将多个固定支板9c放置于多个扩张组件8之间,并将每个固定支板9c的两端分别贴合进气机闸9a的内缘和卡入机闸内环9b的外缘的凸块上;
[0149]
步骤五、张合驱动机构7开始工作,张合驱动机构7的输出端驱动多个扩张组件8向机闸内环9b的轴心靠近,通过多个扩张组件8对每个固定支板9c之间的位置进行限制;
[0150]
步骤六、工作人员操作电焊机,通过电焊机对每个固定支板9c的外端与进气机闸9a的内缘焊接,以及每个固定支板9c的内端与机闸内环9b的凸块焊接,此时进气机闸框架9的顶面焊接完成;
[0151]
步骤七、张合驱动机构7再次工作,张合驱动机构7的多个输出端带动多个扩张组件8再次张开,下压机构6再次工作,下压机构6的输出端带动张合驱动机构7和扩张组件8进行上升复位;
[0152]
步骤八、升起机构4开始工作,升起机构4的输出端推动进气机闸框架9上升;
[0153]
步骤九、工作人员将进气机闸框架9底部固定支板9c的两端进行焊接,在每焊接一个固定支板9c后,物料旋转机构5便通过升起机构4带动进气机闸框架9转动一定角度,工作人员可以原地待命再对下一处固定支板9c进行焊接;
[0154]
步骤十、两面焊接完成后,工作人员将进气机闸框架9从升起机构4的输出端去取下。
[0155]
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明的范围内。本发明要求的保护范围由所附的权利要求书及其等同物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1