一种机械手机构的制作方法
1.本实用新型涉及一种机械手领域,特别涉及一种机械手机构。
背景技术:
2.现有的机械手需要人工进行上料、人工进行下料,工人的工资逐渐上升,使得加工的成本也高,同时人工进行上料和下料安全系数较低,容易产生事故。
技术实现要素:
3.本实用新型解决的技术问题是提供一种可以自动上料、自动下料、成本低、安全系数高的机械手机构。
4.本实用新型解决其技术问题所采用的技术方案是:一种机械手机构,包括工作台,所述工作台上设置有机械手组件,所述机械手组件的下方设置有用于带动机械手组件沿着y轴移动的y轴移动组件,所述y轴移动组件的下方设置有用于驱动y轴移动组件沿着x轴方向移动的x轴移动组件,所述机械手组件包括转动块,所述转动块呈直角三角形,所述转动块的两个直角面上分别设置有用于夹取产品的夹爪和用于驱动夹爪张开或闭合的夹爪气缸,所述转动块的斜面上设置有用于带动转动块转动角度的旋转气缸,所述旋转气缸的驱动轴与转动块固定连接,还包括用于控制机械手机构的控制组件,所述夹爪气缸、旋转气缸、y轴移动组件和x轴移动组件分别与控制组件电气连接,所述机械手组件用于抓取产品进行上料和下料,所述y轴移动组件用于带动机械手组件沿着y轴移动,所述x轴移动组件用于驱动y轴移动组件沿着x轴方向移动从而带动产品沿着x轴方向移动,所述控制组件用于控制机械手机构,所述转动块呈直角三角形便于两个夹爪交换位置,所述夹爪用于夹取产品,所述夹爪气缸用于驱动夹爪张开或闭合,所述旋转气缸用于带动转动块转动角度从而交换两个夹爪的位置,使得在车床本体上的产品加工完成时,一个夹爪将加工完后的产品取下,转动块转动角度,另一个夹爪将夹取的未加工的产品放置到车床本体上。
5.进一步的是:所述x轴移动组件包括固定设置在工作台上的第一滑轨和固定设置在y轴移动组件下方的第一滑块,所述第一滑块和第一滑轨滑动连接,还包括设置在第一滑块上的用于驱动第一滑块沿x轴移动的x轴伺服模组,所述x轴伺服模组与第一滑块固定连接,所述x轴伺服模组与控制组件电气连接,所述x轴伺服模组用于驱动第一滑块沿x轴移动从而带动产品x轴移动。
6.进一步的是:所述x轴移动组件还包括设置在y轴移动组件上方的固定座,所述固定座上设置有第二滑轨,所述第二滑轨远离固定座的一侧滑动连接有第二滑块,所述第二滑块远离第二滑轨的一侧固定连接有第一连接板,所述第一连接板远离第一滑块的一端的下方固定连接有连接块,所述连接块呈直角三角形,所述连接块与旋转气缸远离转动块的一侧固定连接,所述连接块呈直角三角形与转动块的角度配合使得第一连接板呈水平状态。
7.进一步的是:所述y轴移动组件包括用于驱动机械手组件y轴移动的y轴伺服模组,
所述y轴伺服模组与控制组件电气连接,所述y轴伺服模组用于驱动机械手组件y轴移动。
8.本实用新型的有益效果是:本实用新型中的机械手组件代替了人工进行上料和下料,节省了人力、降低了生产成本,提高了安全系数。
附图说明
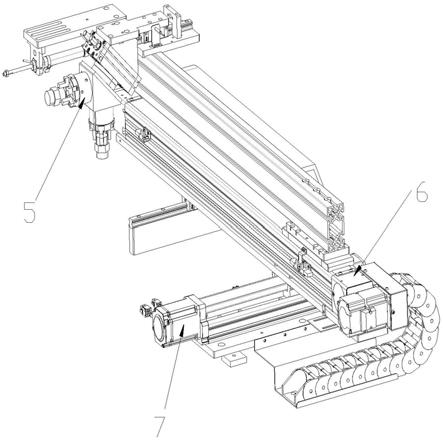
9.图1为一种机械手机构的结构示意图;
10.图2为机械手组件的结构示意图;
11.图3为x轴移动组件的结构示意图;
12.图中标记为:5、机械手组件;6、y轴移动组件;7、x轴移动组件;51、转动块;52、夹爪;53、夹爪气缸;54、旋转气缸;71、第一滑轨;72、第一滑块;73、x轴伺服模组;74、固定座;75、第二滑轨;76、第二滑块;77、第一连接板;78、连接块。
具体实施方式
13.下面结合附图和具体实施方式对本实用新型进一步说明。
14.如图1所示的一种机械手机构,包括工作台,所述工作台上设置有机械手组件5,所述机械手组件5的下方设置有用于带动机械手组件5沿着y轴移动的y轴移动组件6,所述y轴移动组件6的下方设置有用于驱动y轴移动组件6沿着x轴方向移动的x轴移动组件7,所述机械手组件5包括转动块51,所述转动块51呈直角三角形,所述转动块51的两个直角面上分别设置有用于夹取产品的夹爪52和用于驱动夹爪52张开或闭合的夹爪气缸53,所述转动块51的斜面上设置有用于带动转动块51转动角度的旋转气缸54,所述旋转气缸54的驱动轴与转动块51固定连接,还包括用于控制机械手机构的控制组件,所述夹爪气缸53、旋转气缸54、y轴移动组件和x轴移动组件分别与控制组件电气连接,所述机械手组件5用于抓取产品进行上料和下料,所述y轴移动组件6用于带动机械手组件5沿着y轴移动,所述x轴移动组件7用于驱动y轴移动组件6沿着x轴方向移动从而带动产品沿着x轴方向移动,所述控制组件用于控制机械手机构,所述转动块呈直角三角形便于两个夹爪交换位置,所述夹爪用于夹取产品,所述夹爪气缸用于驱动夹爪张开或闭合,所述旋转气缸用于带动转动块转动角度从而交换两个夹爪的位置,使得在车床本体上的产品加工完成时,一个夹爪将加工完后的产品取下,转动块转动角度,另一个夹爪将夹取的未加工的产品放置到机床上。
15.在上述基础上,所述x轴移动组件7包括固定设置在工作台2上的第一滑轨71和固定设置在y轴移动组件6下方的第一滑块72,所述第一滑块72和第一滑轨71滑动连接,还包括设置在第一滑块72上的用于驱动第一滑块72沿x轴移动的x轴伺服模组73,所述x轴伺服模组73与第一滑块72固定连接,所述x轴伺服模组73与控制组件电气连接,所述x轴伺服模组73用于驱动第一滑块72沿x轴移动从而带动产品x轴移动,本实用新型中的x轴伺服模组73可以为气缸。
16.在上述基础上,所述x轴移动组件7还包括设置在y轴移动组件6上方的固定座74,所述固定座74上设置有第二滑轨75,所述第二滑轨75远离固定座74的一侧滑动连接有第二滑块76,所述第二滑块76远离第二滑轨75的一侧固定连接有第一连接板77,所述第一连接板77远离第一滑块72的一端的下方固定连接有连接块78,所述连接块78呈直角三角形,所述连接块78与旋转气缸54远离转动块51的一侧固定连接,所述连接块78呈直角三角形与转
动块51的角度配合使得第一连接板77呈水平状态。
17.在上述基础上,所述y轴移动组件6包括用于驱动机械手组件5y轴移动的y轴伺服模组,所述y轴伺服模组与控制组件电气连接,所述y轴伺服模组用于驱动机械手组件5y轴移动,本实用新型中的y轴伺服模组可以是气缸。
18.以上所述的具体实施例,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1