一种管材快速焊接机械臂的制作方法
1.本实用新型涉及机械臂技术领域,尤其是涉及一种管材快速焊接机械臂。
背景技术:
2.随着社会的发展,尤其是科学技术的进步,大大促进了社会生产力的飞速发展,尤其是工业化和信息智能化时间的到来,更是使得人们进入了一个新的社会发展阶段,工业智能化的发展,大大促进了社会的进步,而在诸多的工业智能化过程中,机械臂是组成并发挥智能作用的一个很重要的组成单位。机械臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统,因其独特的操作灵活性, 已在工业装配,机械焊接等领域得到广泛应用。现有的管材焊接机械臂在焊接时由于缺乏管材固定装置,造成两根管材在对接时易出现偏差,造成焊接不稳定,焊接质量较差,而且一般机械臂的摇臂灵活性有所欠缺,调整焊点时需要多个摇臂共同运作,焊枪移动行程较长,速度较慢。
技术实现要素:
3.本实用新型的目的是针对上述存在的问题和不足,提供一种管材快速焊接机械臂,其通过固定环能够将待焊接的两根管材分别固定,便于相互对接,有助于提升焊接时的稳定性,提高焊接质量,通过电机、电机、传动齿轮、第一锥齿轮、第二锥齿轮、第三锥齿轮、第一连杆、气缸、滑杆以及第二连杆使得第四摇臂可自由转动,便于改变焊枪的位置,提高焊接灵活性,使得焊枪的移动行程变短,从而能够迅速对准焊点,实现快速焊接。
4.为达到上述目的,所采取的技术方案是:
5.一种管材快速焊接机械臂,包括底座、固定环、第一摇臂、第二摇臂、第三摇臂以及第四摇臂,所述固定环位于所述底座右上方,且所述第一摇臂、第二摇臂、第三摇臂以及第四摇臂均位于底座左上方,
6.所述底座上表面右侧固定有支座,且所述支座上端固定有平台,所述平台上表面前后对称安装有两个固定环,且所述底座上表面左侧转动连接有转座,所述第一摇臂固定于所述转座上表面,所述第一摇臂、第二摇臂以及第三摇臂依次首尾相接,且所述第四摇臂一端与第三摇臂铰接,所述第四摇臂另一端安装有焊枪;
7.所述第三摇臂表面固定安装有电机,且所述第三摇臂表面且位于所述电机左侧活动套接有传动齿轮和第一锥齿轮,且所述传动齿轮与所述第一锥齿轮固定,所述第三摇臂表面且位于所述第一锥齿轮左侧固定套接有第二锥齿轮,所述第一锥齿轮与所述第二锥齿轮之间转动连接有第三锥齿轮,所述第三锥齿轮下表面转动连接有第一连杆,且所述第一连杆下端固定有气缸,所述气缸的活动端铰接有第二连杆,所述第四摇臂下表面固定连接有滑杆,所述第二连杆滑动连接于所述滑杆表面。
8.优选的,所述固定环由上下两个抱箍组成,且两个抱箍左端通过转杆转动连接,两个抱箍右端为开端且通过螺栓固定。
9.优选的,所述第一摇臂、第二摇臂以及第三摇臂之间均通过转杆转动连接,且所述
第四摇臂与所述第三摇臂之间通过球铰链铰接。
10.优选的,所述第一摇臂、第二摇臂、第三摇臂以及第四摇臂表面均固定有固定座,且四个所述固定座共同套接有一根气管,且所述气管上端与所述焊枪相接且相通。
11.优选的,所述第一锥齿轮和所述第二锥齿轮对称分布,且所述第一锥齿轮和所述第二锥齿轮尺寸相同,所述第三锥齿轮分别与所述第一锥齿轮和所述第二锥齿轮啮合。
12.优选的,所述电机输出端设有小齿轮,且所述电机与所述传动齿轮之间通过小齿轮啮合传动。
13.采用上述技术方案,所取得的有益效果是:
14.通过固定环能够将待焊接的两根管材分别固定,便于相互对接,有助于提升焊接时的稳定性,提高焊接质量,通过电机、电机、传动齿轮、第一锥齿轮、第二锥齿轮、第三锥齿轮、第一连杆、气缸、滑杆以及第二连杆使得第四摇臂可自由转动,便于改变焊枪的位置,提高焊接灵活性,使得焊枪的移动行程变短,从而能够迅速对准焊点,实现快速焊接。
附图说明
15.为了更清楚地说明本实用新型实施例的技术方案,下文中将对本实用新型实施例的附图进行简单介绍。其中,附图仅仅用于展示本实用新型的一些实施例,而非将本实用新型的全部实施例限制于此。
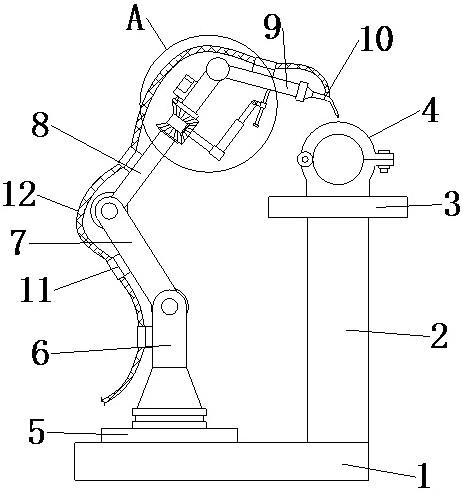
16.图1为本实用新型的整体主视平面结构示意图;
17.图2为本实用新型的整体右视平面结构示意图;
18.图3为本实用新型的图1中的a局部放大结构示意图;
19.图4为本实用新型的固定环打开状态结构示意图。
20.图中标记:底座1;支座2;平台3;固定环4;转座5;第一摇臂6;第二摇臂7;第三摇臂8;第四摇臂9;焊枪10;固定座11;气管12;电机13;传动齿轮14;第一锥齿轮15;第二锥齿轮16;第三锥齿轮17;第一连杆18;气缸19;滑杆20;第二连杆21。
具体实施方式
21.为了使得本实用新型的技术方案的目的、技术特征和技术效果更加清楚,下文中将结合本实用新型具体实施例的附图,对本实用新型实施例的示例方案进行清楚、完整地描述。
22.参见图1至图4,本实用新型是一种管材快速焊接机械臂,包括底座1、固定环4、第一摇臂6、第二摇臂7、第三摇臂8以及第四摇臂9,固定环4位于底座1右上方,且第一摇臂6、第二摇臂7、第三摇臂8以及第四摇臂9均位于底座1左上方,底座1上表面右侧固定有支座2,且支座2上端固定有平台3,平台3上表面前后对称安装有两个固定环4,且底座1上表面左侧转动连接有转座5,第一摇臂6固定于转座5上表面,第一摇臂6、第二摇臂7以及第三摇臂8依次首尾相接,且第四摇臂9一端与第三摇臂8铰接,第四摇臂9另一端安装有焊枪10;
23.第三摇臂8表面固定安装有电机13,且第三摇臂8表面且位于电机13左侧活动套接有传动齿轮14和第一锥齿轮15,且传动齿轮14与第一锥齿轮15固定,第三摇臂8表面且位于第一锥齿轮15左侧固定套接有第二锥齿轮16,第一锥齿轮15与第二锥齿轮16之间转动连接有第三锥齿轮17,第三锥齿轮17下表面转动连接有第一连杆18,且第一连杆18下端固定有
气缸19,气缸19的活动端铰接有第二连杆21,第四摇臂9下表面固定连接有滑杆20,第二连杆21滑动连接于滑杆20表面;
24.固定环4由上下两个抱箍组成,且两个抱箍左端通过转杆转动连接,两个抱箍右端为开端且通过螺栓固定,第一摇臂6、第二摇臂7以及第三摇臂8之间均通过转杆转动连接,且第四摇臂9与第三摇臂8之间通过球铰链铰接,第一摇臂6、第二摇臂7、第三摇臂8以及第四摇臂9表面均固定有固定座11,且四个固定座11共同套接有一根气管12,且气管12上端与焊枪10相接且相通,第一锥齿轮15和第二锥齿轮16对称分布,且第一锥齿轮15和第二锥齿轮16尺寸相同,第三锥齿轮17分别与第一锥齿轮15和第二锥齿轮16啮合,电机13输出端设有小齿轮,且电机13与传动齿轮14之间通过小齿轮啮合传动;
25.具体的,使用者在使用前将电机13接入外部电源,再向气管12内通入乙炔和氧气,乙炔和氧气混合燃烧生成的火焰为作为热源,熔化两根管材之间的部分使之达到原子间的结合,使用者先将两个固定环4开端的螺栓拧出,将固定环4上侧的抱箍打开,然后将两根管材分别置入固定环4内,使得两根管材的焊接处对接,再将固定环4开端的螺栓拧紧,此时两根管材的位置相对固定,管材焊接处紧密贴合,有助于提升焊接时的稳定性,提高焊接质量;
26.进一步的,使用者通过外部控制器控制第一摇臂6、第二摇臂7、第三摇臂8以及第四摇臂9的运动,第一摇臂6通过转座5在底座1表面水平转动,使得第二摇臂7、第三摇臂8以及第四摇臂9均可随之水平转动,第二摇臂7和第三摇臂8之间则通过转杆进行同平面间的垂直转动,第三摇臂8和第四摇臂9之间,通过电机13带动传动齿轮14转动,传动齿轮14带动第一锥齿轮15转动,第一锥齿轮15带动第三锥齿轮17在第一锥齿轮15和第二锥齿轮16之间做周转运动,第三锥齿轮17通过第一连杆18带动气缸19转动,气缸19通过第二连杆21带动滑杆20转动,从而可带动第四摇臂9进行360
°
旋转,通过电机13、电机13、传动齿轮14、第一锥齿轮15、第二锥齿轮16、第三锥齿轮17、第一连杆18、气缸19、滑杆20以及第二连杆21相互配合使得第四摇臂9的自由度大大增加,便于改变焊枪10的位置,提高焊接灵活性,使得焊枪10的移动行程变短,从而能够迅速对准焊点,从而实现快速焊接。
27.本说明书中每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同或相似部分互相参见即可。除非另作定义,本实施例中使用的技术术语或者科学术语应当为本实用新型所属领域内具有一般技能的人士所理解的通常意义。
28.上文中参照优选的实施例详细描述了本实用新型的示范性实施方式,然而本领域技术人员可理解的是,在不背离本实用新型理念的前提下,可以对上述具体实施例做出多种变型和改型,且可以对本实用新型提出的各技术特征、结构进行多种组合,而不超出本实用新型的保护范围,本实用新型的保护范围由所附的权利要求确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1