一种微位移光学刻度平台
1.本实用新型涉及光学机械结构设计技术领域,具体是一种微位移光学刻度平台。
背景技术:
2.激光刻度光学零件加工技术经过多年来的发展,部分技术水平得到较大提高。目前精密元件光学加工的主流是依靠传统工艺或是光刻机。传统的工艺加工精密光学元件大部分是靠手工修磨,效率极低,受人工因素的影响较大,可靠性差且成本高;光刻机可以实现高精度的刻度,但常见的刻度机存在结构复杂,尺寸较大、调节操作复杂、使用不方便以及制作成本较高等缺陷,在机载星载平台等小型仪器设备中,上述工艺或者仪器的使用受到了限制。
技术实现要素:
3.本实用新型目的是针对现有技术的不足,而提供一种微位移光学刻度平台,这种光学刻度平台结构简单、体积小、操作方便、效率高、低成本、高精度。
4.实现本实用新型目的技术方案是:
5.一种微位移光学刻度平台, 包括主基座和设置在主基座上的机械单元和光学单元,所述机械单元包括:
6.间隔顺序设置的电机基座、带中心孔的第一轴承座和第二轴承座,电机基座上设有与控制器连接的步进电机,联轴器两端以开口槽绞紧螺纹的方式一端连接步进电机,另一端连接外壁设有外螺纹的滚珠丝杆,所述第一轴承座与第二轴承座向背的面分别设有由外向内凹陷呈圆形的开口槽,第一轴承和第二轴承分别置于第一轴承座与第二轴承座的开口槽内,第一轴承座与第二轴承座的开口槽的外端面上分别设有法兰盘和法兰盖,滚珠丝杆的不与联轴器铰接的一端顺序穿过法兰盘、第一轴承座和第二轴承座的中心孔并止于法兰盖,微平移台以螺纹方式套接在位于第一轴承座与第二轴承座之间的滚珠丝杆上,微平移台的底部设有固定在主基座上提供支撑的滑块,滑块外侧旁边的主基座上设有间隔设置的第一定位光耦和第二定位光耦,第一定位光耦和第二定位光耦分别与固定在滑块上的第一遮光板和第二遮光板连接,在微平移台上不与第一定位光耦和第二定位光耦同侧的面上设有连杆,连杆外端设有反射镜,反射镜随微平移台步进移动;
7.所述光学单元位于反射镜的同侧,包括嵌在主基座凹槽内且靠近反射镜的半导体激光器,所述半导体激光器上的激光发射口与准直仪连通,准直仪位于半导体激光器和反射镜之间,聚焦透镜安装基座固定于主基座上且位于反射镜的旁边,聚焦透镜通过胶结方式固定在聚焦透镜安装基座上,激光发射口、准直仪,反射镜和聚焦透镜1的中心在同一水平面上。
8.所述微平移台的总位移范围为0
‑
10mm,并由第一定位光耦和第二定位光耦分别提供起点和终点位置信号。
9.所述步进电机为四线二相步进电机,控制方法采用细分驱动方式实现步距为
0.01mm的输出,进而带动微平移台上反射镜移动步距为0.01mm的移动。
10.所述反射镜呈圆形状。
11.所述聚焦透镜为呈直椭圆状的镜体,且聚焦透镜长轴大于反射镜的运动行程、短轴大于圆形反射镜的直径,以确保反射镜反射的激光束均能反射至聚焦透镜上。
12.上述微位移光学刻度平台的工作过程为:根据微型元件的实际精密刻度要求,控制器将按照输入指令控制步进电机运转并通过联轴器带动滚珠丝杆运动,滚珠丝杆将步进电机的旋转运动转化为微平移台的线性移动,步进电机每走一步,微平移台的步距为0.01mm,微平移台移动的总位移范围为0
‑
10mm,微平移台的线性移动可实现反射镜反射激光束方向的微调,当反射镜按照控制器的指令微调到指定的位置后,半导体激光器开始发射激光束,由激光发射口发射出的激光束经过准直仪中的凹凸透镜作用后呈聚集平行状态发射到反射镜上,反射镜将激光束反射到聚焦透镜上,聚焦透镜再将激光束聚焦到需要作业的元件上,进而实现微型元件的精密刻度,控制器以不同的指令控制反射镜的微调可引起激光束反射到聚焦透镜方向的微变,这种激光束反射方向的微变和发射激光束的强弱可实现对微型元件不同部位不同程度的精密刻度。
13.本实用新型与现有技术相比其优点在于:
14.本实用新型结构简单,体积小,操作方便,效率高,成本低,精度高,可以在机载或者星载平台中使用,采用细分驱动方式控制四线二相步进电机,电机的力矩输出平稳,微平移台的步进运动和准直仪的激光束校正可以确保反射镜接收到激光发射器发射出的全部激光束,较大尺寸的聚焦透镜可以实现聚焦来自运动反射镜的不同位置的激光束,此外,本实用新型采用的滚珠丝杆是工具机械和精密机械上最常使用的传动元件,其主要功能是将旋转运动转换成线性运动,同时兼具高精度、可逆性、摩擦阻力小和高效率的特点,且成本较低,结合平台光学系统和机械系统的优势,可实现低成本高精度的光学刻度。
15.这种光学刻度平台结构简单、体积小、操作方便、效率高、低成本、高精度。
附图说明
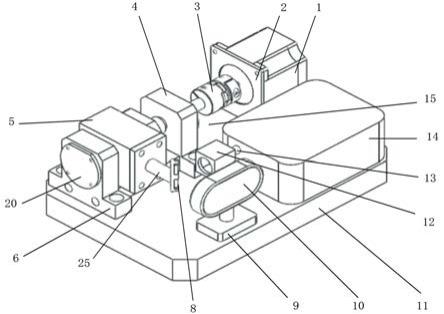
16.图1为实施例的结构示意图;
17.图2为图1的侧视图示意图;
18.图3为图1平台负载运动方向上的剖视图。
19.图中:1.步进电机 2.电机基座 3.联轴器.4.第一轴承座 5 .微平移台 6.第二轴承座 7.法兰盘 8.反射镜 9.聚焦透镜安装基座 10.聚焦透镜 11.主基座 12.准直仪 13.激光发射口 14.半导体激光器 15.控制器 16.滚珠丝杆 17.滑块 18.第一定位光耦 19.第二定位光耦 20.法兰盖 21.第一轴承 22.第二轴承 23.第一遮光板 24.第二遮光板 25.连杆。
具体实施方式
20.下面结合附图和实施例对本实用新型的内容作进一步的阐述,但不是对本实用新型的限定。
21.实施例:
22.参照图1、图2和图3,一种微位移光学刻度平台, 包括主基座11和设置在主基座11
上的机械单元和光学单元,所述机械单元包括:
23.间隔顺序设置的电机基座2、带中心孔的第一轴承座4和第二轴承座6,电机基座2上设有与控制器15连接的步进电机1,联轴器3两端以开口槽绞紧螺纹的方式一端连接步进电机1,另一端连接外壁设有外螺纹的滚珠丝杆16,所述第一轴承座4与第二轴承座6向背的面分别设有由外向内凹陷呈圆形的开口槽,第一轴承21和第二轴承22分别置于第一轴承座4与第二轴承座6的开口槽内,第一轴承座4与第二轴承座6的开口槽的外端面上分别设有法兰盘7和法兰盖20,滚珠丝杆16的不与联轴器3铰接的一端顺序穿过法兰盘7、第一轴承座4和第二轴承座6的中心孔并止于法兰盖20,微平移台5以螺纹方式套接在位于第一轴承座4与第二轴承座6之间的滚珠丝杆16上,微平移台5的底部设有固定在主基座11上提供支撑的滑块17,滑块17外侧旁边的主基座11上设有间隔设置的第一定位光耦18和第二定位光耦19,第一定位光耦18和第二定位光耦19分别与固定在滑块17上的第一遮光板23和第二遮光板24连接,在微平移台5上不与第一定位光耦18和第二定位光耦19同侧的面上设有连杆25,连杆25外端设有反射镜8,反射镜8随微平移台5步进移动;
24.所述光学单元位于反射镜8的同侧,包括嵌在主基座11凹槽内且靠近反射镜8的半导体激光器14,所述半导体激光器14上的激光发射口13与准直仪12连通,准直仪12位于半导体激光器14和反射镜8之间,聚焦透镜安装基座9固定于主基座11上且位于反射镜8的旁边,聚焦透镜10通过胶结方式固定在聚焦透镜安装基座9上,激光发射口13、准直仪12,反射镜8和聚焦透镜10的中心在同一水平面上。
25.所述微平移台5的总位移范围为0
‑
10mm,并由第一定位光耦18和第二定位光耦19分别提供起点和终点位置信号。
26.所述步进电机1为四线二相步进电机,控制方法采用细分驱动方式实现步距为0.01mm的输出,进而带动微平移台5上反射镜8移动步距为0.01mm的移动。
27.所述反射镜8呈圆形状。
28.所述聚焦透镜10为呈直椭圆状的镜体,且聚焦透镜10长轴大于反射镜8的运动行程、短轴大于圆形反射镜8的直径,以确保反射镜8反射的激光束均能反射至聚焦透镜10上。
29.上述微位移光学刻度平台的工作过程为:根据微型元件的实际精密刻度要求,控制器15将按照输入指令控制步进电机1运转并通过联轴器3带动滚珠丝杆16运动,滚珠丝杆16将步进电机1的旋转运动转化为微平移台5的线性移动,步进电机1每走一步,微平移台5的步距为0.01mm,微平移台5移动的总位移范围为0
‑
10mm,微平移台5的线性移动可实现反射镜8反射激光束方向的微调,当反射镜8按照控制器15的指令微调到指定的位置后,半导体激光器14开始发射激光束,由激光发射口13发射出的激光束经过准直仪12中的凹凸透镜作用后呈聚集平行状态发射到反射镜8上,反射镜8将激光束反射到聚焦透镜10上,聚焦透镜10再将激光束聚焦到需要作业的元件上,进而实现微型元件的精密刻度,控制器15以不同的指令控制反射镜8的微调可引起激光束反射到聚焦透镜10方向的微变,这种激光束反射方向的微变和发射激光束的强弱可实现对微型元件不同部位不同程度的精密刻度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1