一种水平关节式焊接机器人的制作方法
1.本发明涉及焊接机器人技术领域,具体的说是一种水平关节式焊接机器人。
背景技术:
2.焊接也称作熔接或者镕接,焊接是一种以加热、高温或者高压的方式接合金属或其他热塑性材料如塑料的制造工艺及技术;现代焊接的能量来源有很多种,包括气体焰、电弧、激光、电子束、摩擦和超声波等,除了在工厂中使用外,焊接还可以在多种环境下进行,如野外、水下和太空,无论在何处,焊接都可能给操作者带来危险,所以在进行焊接时必须采取适当的防护措施,焊接给人体可能造成的伤害包括烧伤、触电、视力损害、吸入有毒气体、紫外线照射过度等。对于目前的焊接多采用人工焊接,这样不仅占用了大量的人工成本,焊接效率低,焊接质量差,而且由于人工焊接,在焊接过程中常伴有危险事故产生,给焊接工人带来了一定的人身危险,因此他焊接机器人来进行焊接就成了主流的研究方向。
3.中国专利(申请号:2015109109324)公开了一种用于激光焊接机器人的焊接头,包括激光喷嘴和与副转动轴转动连接的圆形摆动筒,所述激光喷嘴位于圆形摆动筒内,所述圆形摆动筒内壁的圆周上设有与副转动轴上的控制板电连接的四个均布的电磁铁,四个电磁铁形成环形腔;所述激光喷嘴的尾部安装有环形磁铁,且环形磁铁位于环形腔内;所述环形磁铁与电磁铁之间设有弹性件,所述电磁铁上靠近激光喷嘴的端面上设有防撞柱,从而影响焊接的精度和质量。该发明在焊接微小直线缝时相对于传统的焊接头而言,机器人能耗较小的特点。但是该发明采用的焊接机器人的底座只是单一的一张底板,在进行焊接工作时容易产生晃动,从而影响焊接的精度和质量。
4.为此本发明设计了一种水平关节式焊接机器人,通过柱塞腔及密封柱塞的设置,能够在焊接机器人本体焊接产生震动时,震动能量能够通过底板传递给密封柱塞,因此密封柱塞能够在压力作用下下移,进而压缩柱塞腔内的气体,通过气体的压缩产生反向的作用力,进而达到减震缓冲的目的,减小了焊接机器人本体的震动幅度,降低震动对焊接精度的影响。
技术实现要素:
5.为了弥补现有技术的不足,解决现有的焊接机器人的底座只是单一的一张底板,在进行焊接工作时容易产生晃动,从而影响焊接的精度和质量的问题,本发明提出的一种水平关节式焊接机器人。
6.本发明解决其技术问题所采用的技术方案是:一种水平关节式焊接机器人,包括焊接机器人本体及其下方的底座;
7.所述焊接机器人本体包括底板,所述底板上转动连接有旋转台,所述旋转台上端一侧设置有驱动其旋转的驱动电机,所述旋转台上端另一侧设置有关节式机械臂,所述关节式机械臂的执行端铰接有焊头;所述旋转台外周间隔设置有两组水平布置的档杆;
8.所述底座一侧固定设置有安装箱,所述安装箱上设置有套有缓冲套的v形限位板,
所述v形限位板的对称轴线的延长线通过旋转台的旋转中心,所述v形限位板两侧能够通过限制对应侧的档杆转动来限制旋转台的摆动范围;所述底座上端设置有柱塞腔,所述柱塞腔内设置有上端与底板固定连接的密封柱塞,所述密封柱塞外壁与柱塞腔内壁之间密封配合,所述密封柱塞下端与通过减震弹簧与柱塞腔底部连接;所述密封柱塞下端设置有截面为方形的导向孔,所述柱塞腔底部固定设置有延伸至导向孔内的限位方杆。
9.使用时,通过柱塞腔及密封柱塞的设置,能够在焊接机器人本体焊接产生震动时,震动能量能够通过底板传递给密封柱塞,因此密封柱塞能够在压力作用下下移,进而压缩柱塞腔内的气体,通过气体的压缩产生反向的作用力,进而达到减震缓冲的目的,减小了焊接机器人本体的震动幅度,降低震动对焊接精度的影响;同时由于气体在压缩过程中通过发热消耗了一部分震动能量,因此进一步提高了减震效果,提高焊接机器人本体焊接时的精度,保证焊接品质;通过减震弹簧的设置,能够在密封柱塞下移时对减震弹簧进行压缩,进而使其将部分振动能量转化为弹性势能及部分被弹簧阻尼消耗的热能,因此达到了较好的减震效果;通过限位方杆及导向孔的设置,一方面,能够对柱塞进行限位,限制其转动,避免影响焊接机器人本体焊接时定位精度,另一方面,也能够给通过其压缩导向孔内的气体来达到进一步减震缓冲的效果;设置档杆及v形限位板,能够通过v形限位板及档杆对旋转台的摆动范围进行限制,进而降低小空间内多台焊接机器人进行协同工作时的相互干扰,进而有利于焊接效率的提升。
10.优选的,所述柱塞腔外周的底座上端均布有多个第一导向槽,所述第一导向槽内设置有辅助缓冲杆,所述辅助缓冲杆上端初始时与底板之间存在间距;所述第一导向槽下端设置有与其连通的第二导向槽,所述第二导向槽内径大于第一导向槽布置;所述第二导向槽内设置有与辅助缓冲杆下端连接的压头;所述第二导向槽内一侧设置有逐渐向下延伸靠近其另一侧的弧形弹片,所述压头外设置有与弧形弹片滑动摩擦的摩擦层。通过辅助缓冲杆、压头及弧形弹片的设置,既能够通过弧形弹片的弹性变形及弧形弹片与摩擦层间的热能消耗震动能量,达到减震的效果,又能够在焊接机器人本体有倾倒趋势、底板倾斜时,通过弧形弹片的压缩变形提供对压头的反向支撑力,进通过辅助缓冲杆而对底板倾斜一侧产生反向支撑力,而降低其倾倒风险。
11.优选的,所述弧形弹片靠近柱塞腔一侧布置,所述底座内设置有与柱塞腔同轴布置的环形安装槽,所述环形安装槽依次穿过多个第二导向槽且其外侧与第二导向槽连通,所述环形安装槽内设置有环形的耐磨气囊,所述耐磨气囊与弧形弹片下端面相抵。通过耐磨气囊的设置,能够在弧形弹片受压时压缩耐磨气囊,利用耐磨气囊内气体的压缩提供阻碍弧形弹片的力,进而增大了弧形弹片的减震效果,同时又能够利用耐磨气囊为弧形弹片下端面提供均匀分布的支撑力,避免弧形弹片局部受力过大而损坏,延长使用寿命。
12.优选的,所述环形安装槽内侧通过多个连通孔与柱塞腔连通。通过连通孔的设置,能够使得耐磨气囊在受压时压入连通孔内,进而贴合到密封柱塞的外表面上,利用耐磨气囊与密封柱塞摩擦阻碍密封柱塞下移,进而提高了密封柱塞的减震性能;另外,由于随着压头的下移,耐磨气囊的压缩程度越大,其与密封柱塞之间的压力越大,进而使得与密封柱塞摩擦力越大,越能够快速实现摩擦耗能,进而提高减震效果。
13.优选的,所述耐磨气囊内填充有磁性液体,所述密封柱塞外侧对应连通孔的位置设置有永磁体,所述永磁体外表面与密封柱塞外表面圆滑过渡。通过磁性液体的设置,能够
在保证气囊进入连通孔与密封柱塞挤压摩擦的情况下,通过磁性液体的与永磁体之间吸引力来迟滞密封柱塞的位置偏移,进而能够较好的实现对焊接机器人本体的减震,提高焊接机器人本体焊接时的精度,保证焊接品质。
14.优选的,所述底座上端面设置与柱塞腔同轴布置的环形沉槽,所述环形沉槽内均布有多个向下延伸的排气孔,所述排气孔均通过底座内的导气孔与安装箱内的连通软管一端连通,所述连通软管另一端与固定于安装箱内的气泵连通。通过环形沉槽、排气孔、导气孔及气泵的设置,能够利用气泵将气体通入环形沉槽内,当底板下移至靠近底座上端面时,能够在底板与底座之间形成与环形沉槽连通的过流间隙,进而使得环形沉槽内的气体由内而外移动形成气膜,阻碍底板的下移,进一步提高减震性能;同时气膜还能够对散落至密封柱塞周围的焊渣吹走,避免焊渣掉入柱塞腔上端边缘导致刮花或卡死密封柱塞的问题,延长使用寿命。
15.本发明的有益效果如下:
16.1.本发明所述的一种水平关节式焊接机器人,通过柱塞腔及密封柱塞的设置,能够在焊接机器人本体焊接产生震动时,震动能量能够通过底板传递给密封柱塞,因此密封柱塞能够在压力作用下下移,进而压缩柱塞腔内的气体,通过气体的压缩产生反向的作用力,进而达到减震缓冲的目的,减小了焊接机器人本体的震动幅度,降低震动对焊接精度的影响。
17.2.本发明所述的一种水平关节式焊接机器人,通过环形沉槽、排气孔、导气孔及气泵的设置,能够利用气泵将气体通入环形沉槽内,当底板下移至靠近底座上端面时,能够在底板与底座之间形成与环形沉槽连通的过流间隙,进而使得环形沉槽内的气体由内而外移动形成气膜,阻碍底板的下移,进一步提高减震性能;同时气膜还能够对散落至密封柱塞周围的焊渣吹走,避免焊渣掉入柱塞腔上端边缘导致刮花或卡死密封柱塞的问题,延长使用寿命。
附图说明
18.下面结合附图对本发明作进一步说明。
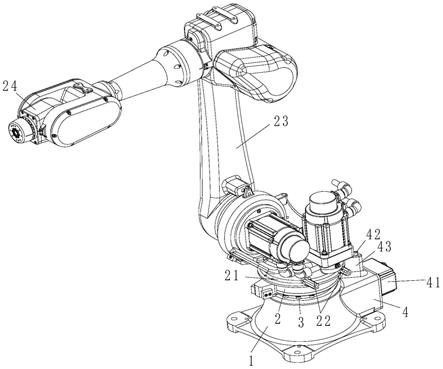
19.图1是本发明的立体图;
20.图2是本发明中底座的立体图;
21.图3是本发明中底座的剖视图;
22.图4是图3中a处的局部放大图;
23.图中:
24.1、底座;11、环形沉槽;12、排气孔;13、导气孔;14、柱塞腔;15、减震弹簧;16、限位方杆;2、底板;21、旋转台;22、档杆;23、关节式机械臂;24、焊头;3、辅助缓冲杆;31、第一导向槽;32、压头;33、第二导向槽;34、摩擦层;35、弧形弹片;36、耐磨气囊;37、磁性液体;38、环形安装槽;39、连通孔;4、安装箱;41、控制器;42、v形限位板;43、缓冲套;44、气泵;45、连通软管;5、密封柱塞;51、导向孔;52、永磁体。
具体实施方式
25.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结
合具体实施方式,进一步阐述本发明。
26.如图1至图4所示,一种水平关节式焊接机器人,包括焊接机器人本体及其下方的底座1;
27.所述焊接机器人本体包括底板2,所述底板2上转动连接有旋转台21,所述旋转台21上端一侧设置有驱动其旋转的驱动电机,所述旋转台21上端另一侧设置有关节式机械臂23,所述关节式机械臂23的执行端铰接有焊头24;所述旋转台21外周间隔设置有两组水平布置的档杆22;
28.所述底座1一侧固定设置有安装箱4,所述安装箱4上设置有套有缓冲套43的v形限位板42,所述v形限位板42的对称轴线的延长线通过旋转台21的旋转中心,所述v形限位板42两侧能够通过限制对应侧的档杆22转动来限制旋转台21的摆动范围;所述底座1上端设置有柱塞腔14,所述柱塞腔14内设置有上端与底板2固定连接的密封柱塞5,所述密封柱塞5外壁与柱塞腔14内壁之间密封配合,所述密封柱塞5下端与通过减震弹簧15与柱塞腔14底部连接;所述密封柱塞5下端设置有截面为方形的导向孔51,所述柱塞腔14底部固定设置有延伸至导向孔51内的限位方杆16。
29.使用时,通过柱塞腔14及密封柱塞5的设置,能够在焊接机器人本体焊接产生震动时,震动能量能够通过底板2传递给密封柱塞5,因此密封柱塞5能够在压力作用下下移,进而压缩柱塞腔14内的气体,通过气体的压缩产生反向的作用力,进而达到减震缓冲的目的,减小了焊接机器人本体的震动幅度,降低震动对焊接精度的影响;同时由于气体在压缩过程中通过发热消耗了一部分震动能量,因此进一步提高了减震效果,提高焊接机器人本体焊接时的精度,保证焊接品质;通过减震弹簧15的设置,能够在密封柱塞5下移时对减震弹簧15进行压缩,进而使其将部分振动能量转化为弹性势能及部分被弹簧阻尼消耗的热能,因此达到了较好的减震效果;通过限位方杆16及导向孔51的设置,一方面,能够对柱塞进行限位,限制其转动,避免影响焊接机器人本体焊接时定位精度,另一方面,也能够给通过其压缩导向孔51内的气体来达到进一步减震缓冲的效果;设置档杆22及v形限位板42,能够通过v形限位板42及档杆22对旋转台21的摆动范围进行限制,进而降低小空间内多台焊接机器人进行协同工作时的相互干扰,进而有利于焊接效率的提升。
30.作为本发明的一种实施方式,所述柱塞腔14外周的底座1上端均布有多个第一导向槽31,所述第一导向槽31内设置有辅助缓冲杆3,所述辅助缓冲杆3上端初始时与底板2之间存在间距;所述第一导向槽31下端设置有与其连通的第二导向槽33,所述第二导向槽33内径大于第一导向槽31布置;所述第二导向槽33内设置有与辅助缓冲杆3下端连接的压头32;所述第二导向槽33内一侧设置有逐渐向下延伸靠近其另一侧的弧形弹片35,所述压头32外设置有与弧形弹片35滑动摩擦的摩擦层34。通过辅助缓冲杆3、压头32及弧形弹片35的设置,既能够通过弧形弹片35的弹性变形及弧形弹片35与摩擦层34间的热能消耗震动能量,达到减震的效果,又能够在焊接机器人本体有倾倒趋势、底板2倾斜时,通过弧形弹片35的压缩变形提供对压头32的反向支撑力,进通过辅助缓冲杆3而对底板2倾斜一侧产生反向支撑力,而降低其倾倒风险。
31.作为本发明的一种实施方式,所述弧形弹片35靠近柱塞腔14一侧布置,所述底座1内设置有与柱塞腔14同轴布置的环形安装槽38,所述环形安装槽38依次穿过多个第二导向槽33且其外侧与第二导向槽33连通,所述环形安装槽38内设置有环形的耐磨气囊36,所述
耐磨气囊36与弧形弹片35下端面相抵。通过耐磨气囊36的设置,能够在弧形弹片35受压时压缩耐磨气囊36,利用耐磨气囊36内气体的压缩提供阻碍弧形弹片35的力,进而增大了弧形弹片35的减震效果,同时又能够利用耐磨气囊36为弧形弹片35下端面提供均匀分布的支撑力,避免弧形弹片35局部受力过大而损坏,延长使用寿命。
32.作为本发明的一种实施方式,所述环形安装槽38内侧通过多个连通孔39与柱塞腔14连通。通过连通孔39的设置,能够使得耐磨气囊36在受压时压入连通孔39内,进而贴合到密封柱塞5的外表面上,利用耐磨气囊36与密封柱塞5摩擦阻碍密封柱塞5下移,进而提高了密封柱塞5的减震性能;另外,由于随着压头32的下移,耐磨气囊36的压缩程度越大,其与密封柱塞之间的压力越大,进而使得与密封柱塞5摩擦力越大,越能够快速实现摩擦耗能,进而提高减震效果。
33.作为本发明的一种实施方式,所述耐磨气囊36内填充有磁性液体37,所述密封柱塞5外侧对应连通孔39的位置设置有永磁体52,所述永磁体52外表面与密封柱塞5外表面圆滑过渡。通过磁性液体37的设置,能够在保证气囊进入连通孔39与密封柱塞5挤压摩擦的情况下,通过磁性液体37的与永磁体52之间吸引力来迟滞密封柱塞5的位置偏移,进而能够较好的实现对焊接机器人本体的减震,提高焊接机器人本体焊接时的精度,保证焊接品质。
34.作为本发明的一种实施方式,所述底座1上端面设置与柱塞腔14同轴布置的环形沉槽11,所述环形沉槽11内均布有多个向下延伸的排气孔12,所述排气孔12均通过底座1内的导气孔13与安装箱4内的连通软管45一端连通,所述连通软管45另一端与固定于安装箱4内的气泵44连通。通过环形沉槽11、排气孔12、导气孔13及气泵44的设置,能够利用气泵44将气体通入环形沉槽11内,当底板2下移至靠近底座1上端面时,能够在底板2与底座1之间形成与环形沉槽11连通的过流间隙,进而使得环形沉槽11内的气体由内而外移动形成气膜,阻碍底板2的下移,进一步提高减震性能;同时气膜还能够对散落至密封柱塞5周围的焊渣吹走,避免焊渣掉入柱塞腔14上端边缘导致刮花或卡死密封柱塞5的问题,延长使用寿命。
35.使用时,通过柱塞腔14及密封柱塞5的设置,能够在焊接机器人本体焊接产生震动时,震动能量能够通过底板2传递给密封柱塞5,因此密封柱塞5能够在压力作用下下移,进而压缩柱塞腔14内的气体,通过气体的压缩产生反向的作用力,进而达到减震缓冲的目的,减小了焊接机器人本体的震动幅度,降低震动对焊接精度的影响;同时由于气体在压缩过程中通过发热消耗了一部分震动能量,因此进一步提高了减震效果,提高焊接机器人本体焊接时的精度,保证焊接品质;通过减震弹簧15的设置,能够在密封柱塞5下移时对减震弹簧15进行压缩,进而使其将部分振动能量转化为弹性势能及部分被弹簧阻尼消耗的热能,因此达到了较好的减震效果;通过限位方杆16及导向孔51的设置,一方面,能够对柱塞进行限位,限制其转动,避免影响焊接机器人本体焊接时定位精度,另一方面,也能够给通过其压缩导向孔51内的气体来达到进一步减震缓冲的效果;设置档杆22及v形限位板42,能够通过v形限位板42及档杆22对旋转台21的摆动范围进行限制,进而降低小空间内多台焊接机器人进行协同工作时的相互干扰,进而有利于焊接效率的提升;通过辅助缓冲杆3、压头32及弧形弹片35的设置,既能够通过弧形弹片35的弹性变形及弧形弹片35与摩擦层34间的热能消耗震动能量,达到减震的效果,又能够在焊接机器人本体有倾倒趋势、底板2倾斜时,通过弧形弹片35的压缩变形提供对压头32的反向支撑力,进通过辅助缓冲杆3而对底板2倾斜
一侧产生反向支撑力,而降低其倾倒风险;通过耐磨气囊36的设置,能够在弧形弹片35受压时压缩耐磨气囊36,利用耐磨气囊36内气体的压缩提供阻碍弧形弹片35的力,进而增大了弧形弹片35的减震效果,同时又能够利用耐磨气囊36为弧形弹片35下端面提供均匀分布的支撑力,避免弧形弹片35局部受力过大而损坏,延长使用寿命;通过连通孔39的设置,能够使得耐磨气囊36在受压时压入连通孔39内,进而贴合到密封柱塞5的外表面上,利用耐磨气囊36与密封柱塞5摩擦阻碍密封柱塞5下移,进而提高了密封柱塞5的减震性能;另外,由于随着压头32的下移,耐磨气囊36的压缩程度越大,其与密封柱塞之间的压力越大,进而使得与密封柱塞5摩擦力越大,越能够快速实现摩擦耗能,进而提高减震效果;通过磁性液体37的设置,能够在保证气囊进入连通孔39与密封柱塞5挤压摩擦的情况下,通过磁性液体37的与永磁体52之间吸引力来迟滞密封柱塞5的位置偏移,进而能够较好的实现对焊接机器人本体的减震,提高焊接机器人本体焊接时的精度,保证焊接品质;通过环形沉槽11、排气孔12、导气孔13及气泵44的设置,能够利用气泵44将气体通入环形沉槽11内,当底板2下移至靠近底座1上端面时,能够在底板2与底座1之间形成与环形沉槽11连通的过流间隙,进而使得环形沉槽11内的气体由内而外移动形成气膜,阻碍底板2的下移,进一步提高减震性能;同时气膜还能够对散落至密封柱塞5周围的焊渣吹走,避免焊渣掉入柱塞腔14上端边缘导致刮花或卡死密封柱塞5的问题,延长使用寿命。
36.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1