一种车床的控制方法及车床
1.本发明涉及金工实习技术领域,特别是一种车床的控制方法及车床。
背景技术:
2.当前高校里面的金工实习课程中,都有普通车床实训课程,而实习的学生都是首次接触车床,对其一无所知。而由于长时间上理论课,首次接触到实操课,大家都会非常感兴趣,着急上手开机进行操作。但是机床如果操作不当,直接会给学生带来身体的伤害。所以老师在讲解机床操作步骤时,都会特别强调规范操作,小心实操。但是实际金工实习过程中,还是会偶尔出现车床伤人事件,这是因为目前普通车床没有安全保护装置,如果是实习学生误操作了自动走刀手柄,或者由于紧张走神,当启动了自动走刀手柄,明显看到刀架或者中溜板离高速卡盘很近时,而不知所措如何停止刀架z方向进给时,会造成刀架或者中溜板高速撞击卡盘,造成机器的损坏,更甚者造成学生身体的伤害,发生了严重了事故,轻者造成刀具的损坏,严重者由于撞击的刀架残片反弹到学生身体,造成人身伤害。
技术实现要素:
3.本发明要解决的技术问题是,为了避免金工实习课程中安全事故的重复发生,悲剧的重演,学生可以安全大胆的操作车床,提供了一种车床的控制方法及车床。
4.本发明解决其技术问题所采用的技术方案是:一种车床的控制方法,包括以下步骤:
5.a、将速度传感器安装到运动刀架的正面,将信号接收器安装到卡盘上且位于速度传感器的正对面,信号接收器接收速度传感器的信号;
6.b、设定警报器的安全时间,设定第一超声波传感器的安全距离;设定第二超声波传感器的安全距离,设定第二超声波传感器对应的安全系数;
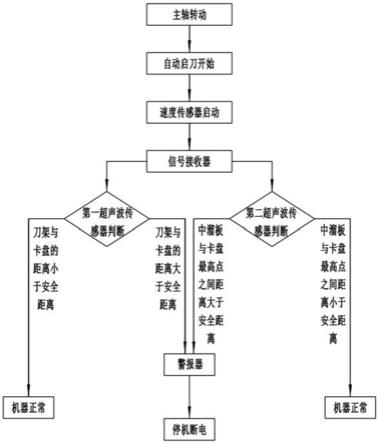
7.c、第一超声波传感器接收信号接收器的信号,当刀架与卡盘的距离小于设定的第一超声波传感器的安全距离时,第一超声波传感器将信号持续的传递到控制板,控制板将信号传入到警报器,警报器响起;当警报器的警报时间超过警报器的安全时间时,则控制板控制车床停机;
8.第二超声波传感器接收信号接收器的信号,当中溜板与卡盘最高点之间距离小于第二超声波传感器的安全距离时,第二超声波传感器将信号持续的传递到控制板,控制板将信号传入到警报器,警报器响起;当中溜板与卡盘最高点之间距离小于第二超声波传感器的安全距离乘以安全系数时,则控制板控制车床停机。
9.进一步的,所述警报器的安全时间是30s。
10.一种车床,包括刀架、卡盘和中溜板,还包括:警报器;控制板,所述控制板控制所述警报器和车床启停;速度传感器,所述速度传感器安装在所述刀架的正面;信号接收器,所述信号接收器安装在所述卡盘上且位于速度速度传感器的正对面,所述信号接收器接收所述速度传感器的信号;第一超声波传感器,所述第一超声波传感器接收信号接收器的信
号,所述第一超声波传感器用于判断所述刀架和所述卡盘之间的距离并将信号持续的传递到所述控制板;第二超声波传感器,所述第二超声波传感器接收信号接收器的信号,所述第二超声波传感器用于判断所述中溜板与所述卡盘最高点之间距离并将信号持续的传递到所述控制板。
11.本发明的有益效果是:
12.1.能有效避免由于学生紧张或者不熟练,同时忘记操作自动走刀手柄,造成人身安全的伤害,大大提高车床的安全性,提高学生金工实习的效率及紧张感,解决了高校金工实习学生操作车床带来的心里不安全感,提高学生的实操水平;
13.2.设计了自动保护控制方法,通过超声波传感器探测出刀架与卡盘之间距离,实现自动识别判断,避免了刀架和卡盘的相撞,增加了车床的安全性;
14.3.该一种车床的控制方法,采用速度传感器,信号接收器,超声波传感器,警报器等相关模块集成一起,通过超声波传感器提前置入的安全距离判断中溜板与卡盘是否会撞击,如果有这个风险,直接报警,最后断电,实现了人工智能判断,解决了金工实习学生的误操作及紧张带来的车床撞刀的风险。
附图说明
15.下面将结合附图及实施例对本发明作进一步说明,附图中:
16.图1为车床的控制方法原理图;
17.图2为车床的侧视图;
18.图3为车床的俯视图。
19.以上各图中,1、速度传感器;2、信号接收器;3、警报器;4、第一超声波传感器;5、第二超声波传感器。
具体实施方式
20.为更进一步阐述本发明为达成预定发明目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本发明的具体实施方式、结构、特征及其功效,详细说明如下:
21.本发明的一种车床的控制方法比原来车床增加了集成控制系统,具体情况如下:首先是车床启动,操作步骤和原来的一样,卡盘把工件夹紧,主轴带动工件高速旋转,然后使用溜板箱进行对刀,对刀完成后根据设定尺寸,进行自动走刀。而当刀具完成z向正方向预设的距离后,进行手动反方向调整自动走刀手柄,进行退刀步骤。而如果是新手操作该工序,由于紧张或者不熟练没有记清楚相关走刀步骤,当启动自动走刀手柄后,容易造成刀架或者中溜板与旋转的卡盘撞击。
22.一种车床的控制方法,如图1至图3所示,包括以下步骤:
23.a、将速度传感器1安装到运动刀架的正面,正对着操作人员,将信号接收器2安装到卡盘上且位于速度传感器1的正对面,信号接收器2接收速度传感器1的信号。
24.b、设定警报器3的安全时间,设定第一超声波传感器4的安全距离;设定第二超声波传感器5的安全距离,设定第二超声波传感器5对应的安全系数。
25.当溜板箱在z轴上滑动时,该速度传感器1就会记录数据,位移数据通过控制板中心转换成电信号,传入到信号接收器2中,信号接收器2然后转换电信号传输到两个超声波
传感器中。
26.c、第一超声波传感器4接收信号接收器2的信号,当刀架与卡盘的距离小于设定的第一超声波传感器4的安全距离时,第一超声波传感器4将信号持续的传递到控制板,控制板将信号传入到警报器3,警报器3响起;当警报器3的警报时间超过警报器3的安全时间时,则控制板控制车床停机;
27.第一超声波传感器4是专门测量刀架和卡盘的最高点之间距离s1,其内部提前植入了安全距离1.5s1,当自动走刀手柄旋转到z轴正方向时,速度传感器1和信号接收器2经过一系列转换,传输到第一超声波传感器4中,而它由于内部设置了安全距离1.5s1,当刀架与卡盘的距离小于其设置的安全距离时,就会把信号传入到控制板,控制板相关信号传入到警报器3,警报器3响起的安全时间内,如果刀架和卡盘之间距离,超出第一超声波传感器4中植入的安全距离时,警报器会停止,机器不会关机,正常运行。如果警报器安全时间内,第一超声波传感器4检测距离一直是小于安全距离时,其进一步引起车床停机断电。避免刀架和卡盘撞击,消除车床撞刀的风险。安全时间优选30s。
28.第二超声波传感器5接收信号接收器2的信号,当中溜板与卡盘最高点之间距离小于第二超声波传感器5的安全距离时,第二超声波传感器5将信号持续的传递到控制板,控制板将信号传入到警报器3,警报器3响起;当中溜板与卡盘最高点之间距离小于第二超声波传感器5的安全距离乘以安全系数时,则控制板控制车床停机;
29.第二超声波传感器5安装到主轴箱卡盘下面,正对着中溜板,因为自动走刀时,中溜板在靠近卡盘时,也有撞击卡盘底部的风险,第二超声波传感器5中提前已经植入中溜板与卡盘最高点之间距离1.5s2,其中卡盘最高点与中溜板之间距离为s2,当自动走刀时,中溜板与卡盘最高点之间距离小于第二超声波传感器5中设置的安全距离时,同理警报器也会响起。如果安全时间之内第二超声波传感器5检测到中溜板与卡盘最高点之间距离小于安全距离时候,警报器熄灭,如果持续进行,则判断距离越来越近,进一步车床停机断电。
30.本发明的一种车床的控制方法有效避免了经常的撞刀事件,使其事故概率大大降低,提高了金工实习学生的人身安全。
31.本发明还提供了一种包括上述控制方法的车床,该车床是上述控制方法的具体应用,可以实现与上述一种车床的控制方法相同的有益效果。
32.一种车床,如图2和图3所示,包括刀架、卡盘和中溜板,还包括警报器3,控制板,速度传感器1,信号接收器2,第一超声波传感器4和第二超声波传感器5。
33.控制板控制警报器3和车床启停,速度传感器1安装在刀架的正面。信号接收器2安装在卡盘上且位于速度速度传感器1的正对面,信号接收器2接收速度传感器1的信号。第一超声波传感器4接收信号接收器2的信号,第一超声波传感器4用于判断刀架和卡盘之间的距离并将信号持续的传递到控制板。第二超声波传感器5接收信号接收器2的信号,第二超声波传感器5用于判断中溜板与卡盘最高点之间距离并将信号持续的传递到控制板。
34.以上参考了优选实施例对本发明进行了描述,但本发明的保护范围并不限制于此,在不脱离本发明的范围的情况下,可以对其进行各种改进并且可以用等效物替换其中的部件,只要不存在结构冲突,各个实施例中所提到的各项技术特征均可以任意方式组合起来,且不应将权利要求中的任何附图标记视为限制所涉及的权利要求,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的。因此,任何落入权利要求的范围内
的所有技术方案均在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1