一种链条自动焊接设备的使用方法与流程
1.本发明涉及链条加工技术领域,具体是指一种链条自动焊接设备的使用方法。
背景技术:
2.链条由多个金属的链环组成,在生产生活中应用非常广泛,多用作机械吊挂、牵引等用途,大多数链条生产厂家采用多部机器分步生产链条的方式,先将加热的圆棒折弯成链环,并在折弯时将链环挂在链条上,然后通过人工操作将链条上的各个接缝进行焊接,然后将焊接后的链环进行去毛刺操作,不仅需要大量的人力物力,而且生产效率低,降低了链条的加工效率,达不到生产需求。
技术实现要素:
3.本发明针对现有技术的不足,提供一种效率高、安全可靠、操作方便的链条自动焊接设备的使用方法,可以自动实现链条的走链、焊接以及焊接后的去毛刺操作。
4.本发明是通过如下技术方案实现的,提供一种链条自动焊接设备,包括送链装置、焊接装置以及去毛刺装置,所述送链装置包括固定的底座、滑接在底座上的送链板以及将送链板向焊接装置方向推动的送链驱动,所述送链板上固接有与焊接装置适配的定位块,所述定位块上设置有与链环适配的定位台,定位台的两侧各设有一个与链环宽度适配的定位槽,定位块的两侧各装有一个固定在送链板上的导链装置,所述送链板上还装有设置在定位块远离焊接装置一侧的拍平装置以及与链条适配的拨链装置,所述拍平装置包括滑接在送链板上的拍平滑板以及将拍平滑板向定位块方向推动的拍平滑板驱动,拍平滑板上铰接有上拍板和下拍板,上拍板的一端设置在链环的上方,下拍板的一端设置在链环的下方,拍平滑板上还装有驱动上拍板和下拍板反向同步旋转的拍平驱动。
5.本方案中焊接装置用于对链条的接缝进行焊接,去毛刺装置用于对焊接后的链条进行去毛刺和焊渣的操作,送链装置通过送链驱动带动送链板将链条上需要焊接的链环的接缝推送到焊接装置中,并通过送链装置中的拨链装置拨动链条,使焊接完一个链环后,链条移动一个链环的距离,对下一个链环进行焊接,定位块的两侧各装有一个固定在送链板上的导链装置,两个导链装置分别用于对焊接前和焊接后的链条进行导向,并使链条上带有接缝的一侧设置在导链装置靠近焊接装置的一侧。
6.本方案中的拍平装置通过拍平滑板驱动推动拍平滑板向链环方向移动,使上拍板的端部和下拍板的端部位于链环上下两侧,拍平驱动带动上拍板和下拍板同步反向旋转夹紧,从而将定位台处的链环拍平,此时定位台处链环两侧的链环竖向卡在定位槽中,使需要焊接的链环保持水平。
7.作为优化,所述拍平驱动为固定在拍平滑板上的拍平气缸,上拍板的另一端铰接有上连板,下拍板的另一端铰接有下连板,上连板和下连板均与拍平气缸的伸缩轴铰接。
8.本方案中上拍板的另一端铰接有上连板,下拍板的另一端铰接有下连板,上连板和下连板均与拍平气缸的伸缩轴铰接,通过拍平气缸伸长,使上连板和上拍板的铰接点向
上运动,下拍板和下连板的铰接点上下运动,同时实现上拍板和下拍板同步反向旋转。
9.作为优化,所述去毛刺装置包括固定的底板、滑接在底板上的刮刺板以及驱动刮刺板沿链环长度方向移动的刮刺驱动,刮刺板设置在链环长度方向的一侧,刮刺板的上部铰接有上转臂和上驱动臂,上转臂的一端固接有上刮刀,另一端与上连杆的一端铰接,上连杆的另一端与上驱动臂的一端铰接,上驱动臂的另一端装有上导向轮,刮刺板的下部铰接有下转臂和下驱动臂,下转臂的一端固接有下刮刀,另一端与下连杆的一端铰接,下连杆的另一端与下驱动臂的一端铰接,下驱动臂的另一端装有下导向轮,上导向轮和下导向轮之间设有固定的导向板,导向板的上端面和下端面各开有一个沉槽,上驱动臂上装有将上导向轮向导向板方向拉动的拉簧,下驱动臂上装有将下导向轮向导向板方向拉动的拉簧,上刮刀的刀口与下刮刀的刀口围成的区域与链环的本体适配。
10.本方案中刮刺驱动驱动刮刺板向链环方向移动,上导向轮和下导向轮移动到导向板的沉槽位置时,通过拉簧带动上驱动臂和下驱动臂转动,分别通过上连杆和下连杆带动上转臂和下转臂转动,使上刮刀和下刮刀夹紧链环,刮刺板继续向链环方向移动,从而通过上刮刀和下刮刀将毛刺和焊渣清除。
11.作为优化,所述去毛刺装置还包括分别设置在链环长度方向两侧的两个夹紧块,所述夹紧块滑接在底板上,还包括驱动夹紧块沿链环长度方向移动的夹紧驱动,夹紧块端部设有与链环端部设配的凹槽。
12.本方案中的夹紧块用于去毛刺时对链环进行夹紧,防止去毛刺时链环移动。
13.作为优化,所述拨链装置包括滑接在送链板上的拨链滑板、驱动拨链滑板沿链条行进方向移动的拨链滑板驱动、铰接在拨链滑板上的拨链插板座板以及驱动拨链插板座板旋转的拨链驱动,拨链插板座板上固接有拨链插板。
14.本方案中的拨链装置通过将拨链插板插入链条中,并通过拨链滑板驱动带动拨链滑板向链条的行进方向移动,使链条行进一个链环的距离,从而对下一个链环进行焊接。
15.作为优化,所述拨链驱动为拨链气缸,拨链气缸的伸缩轴上铰接有气缸铰接板,拨链滑板上还铰接有铰接板,所述铰接板和拨链插板座板均与气缸铰接板铰接。
16.通过本方案中的拨链气缸、气缸铰接板和铰接板,来实现拨链插板座板的旋转。
17.作为优化,所述焊接装置包括底座、固接在底座上的左支架、滑接在底座上的右支架以及驱动右支架左右移动的横移油缸,左支架与底座之间装有绝缘板,左支架上固接有左固定电极,左支架上轴接有左压杆,左压杆活动端的下端面固接有位于左固定电极上方的左活动电极,右支架上固接有右固定电极,右支架上轴接有右压杆,右压杆活动端的下端面固接有位于右固定电极上方的右活动电极,还包括分别驱动左压杆和右压杆转动的左压紧油缸和右压紧油缸。
18.所述焊接装置为电阻焊,通过送链板将链环接缝两侧分别推送至左固定电极和右固定电极上,通过左活动电极将链环接缝左侧压紧在左固定电极上,通过右活动电极将链环接缝右侧压紧在右固定电极上,通过横移油缸驱动右支架向左侧移动,将链环接缝压紧,左固定电极与左活动电极连接电源正极,右活动电极和右固定电极连接电源负极,通电实现接缝的焊接。
19.作为优化,所述导链装置包括截面为三角形的下导向块和截面为倒三角形上导向块,上导向块和下导向块分别位于链条的上下两侧,下导向块固定在送链板的上端面,送链
板上还固接有位于上导向块上方的固定板,上导向块的上端面固接有竖向的导向轴,固定板上设有与导向轴适配的导向孔,上导向块与固定板之间装有弹簧。
20.本方案中上导向块的上端面固接有竖向的导向轴,固定板上设有与导向轴适配的导向孔,上导向块与固定板之间装有弹簧,因此上导向块沿上下方向滑接在固定板上,且弹簧推动上导向块向下运动,从而将链条夹紧在上导向块和下导向块之间,由于链条为十字交叉排布,因此上导向块和下导向块分别插入链条相对的两个夹角内。
21.作为优化,所述导链装置远离定位块的一侧设有安装在送链板上的导向轮。
22.本方案中的导向轮对进入导链装置的链条和从另一个导链装置中出来的链条进行导向,从而使链条的两端从导向轮处下垂,通过链条的重力使链条拉紧。
23.一种链条自动焊接设备的使用方法,包括如下步骤:a.将链条穿过两侧的导链装置,使链环开口侧设置在导链装置靠近焊接装置的一侧,并将需要焊接的链环放置在定位块的定位台处;b.通过拍平滑板驱动推动拍平滑板向链环方向移动,使上拍板的端部和下拍板的端部位于链环上下两侧,拍平驱动带动上拍板和下拍板同步夹紧,从而将定位台处的链环拍平,此时定位台处链环两侧的链环竖向卡在定位槽中,使需要焊接的链环保持水平,然后拍平装置收回;c.通过送链驱动推动送链板向焊接装置方向移动,使需要焊接的链环接缝处伸入焊接装置中;d.通过左活动电极将链环接缝左侧压紧在左固定电极上,通过右活动电极将链环接缝右侧压紧在右固定电极上,通过横移油缸驱动右支架向左侧移动,将链环接缝压紧,左固定电极与左活动电极连接电源正极,右活动电极和右固定电极连接电源负极,通电实现接缝的电阻焊;e.送链驱动驱动送链板收回原位,通过去毛刺装置的夹紧驱动驱动两个夹紧块将焊接后的链环夹紧,刮刺驱动驱动刮刺板向链环方向移动,上导向轮和下导向轮移动到导向板的沉槽位置时,通过拉簧带动上驱动臂和下驱动臂转动,分别通过上连杆和下连杆带动上转臂和下转臂转动,使上刮刀和下刮刀夹紧链环,刮刺板继续向链环方向移动,从而通过上刮刀和下刮刀将毛刺和焊渣清除,然后通过刮刺板反向运动,使上刮刀和下刮刀再进行一次刮除操作,上导向轮和下导向轮移动出沉槽位置后,上刮刀和下刮刀与链环分离,然后通过夹紧驱动驱动两个夹紧块与链环分离;f.通过拨链驱动带动拨链插板座板旋转,使拨链插板插入链条中,通过拨链滑板驱动带动拨链滑板向链条的行进方向移动,使链条行进一个链环的距离,从而对下一个链环进行焊接。
24.本发明的有益效果为:本发明的一种链条自动焊接设备,通过焊接装置对链条的接缝进行焊接,去毛刺装置用于对焊接后的链条进行去毛刺和焊渣的操作,送链装置通过送链驱动带动送链板将链条上需要焊接的链环的接缝推送到焊接装置中,并通过送链装置中的拨链装置拨动链条,使焊接完一个链环后,链条移动一个链环的距离,对下一个链环进行焊接,定位块的两侧各装有一个固定在送链板上的导链装置,两个导链装置分别用于对焊接前和焊接后的链条进行导向,并使链条上带有接缝的一侧设置在导链装置靠近焊接装置的一侧,本方案可以自动实现链条的走链、焊接以及焊接后的去毛刺操作。
附图说明
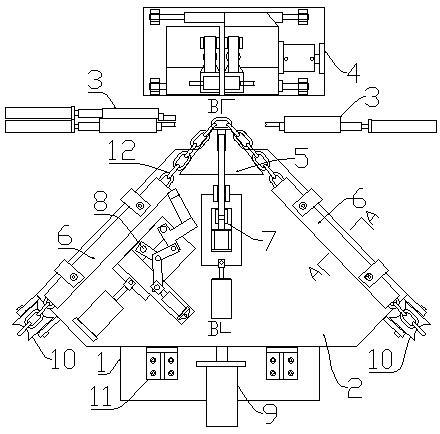
25.图1为本发明结构示意图;图2为本发明定位块结构示意图;图3为本发明定位块工作状态俯视图;图4为本发明a
‑
a面剖视图;图5为本发明拍平前b
‑
b面剖视图;图6为本发明拍平后b
‑
b面剖视图;图7为本发明拨链装置结构示意图;图8为本发明拨链装置另一状态结构示意图;图9为本发明焊接装置俯视图;图10为本发明焊接装置正视图;图11为本发明焊接装置中左压杆的安装示意图;图12为本发明去毛刺装置俯视图;图13为本发明去毛刺装置工作状态俯视图;图14为本发明去毛刺装置正视图;图15为本发明去毛刺装置工作状态正视图;图中所示:1、底座,2、送链板,3、去毛刺装置,4、焊接装置,5、定位块,6、导链装置,7、拍平装置,8、拨链装置, 9、送链驱动,10、导向轮,11、限位块,301、底板,302、夹紧块,303、夹紧导向块,304、夹紧驱动,305、刮刺板,306、刮刺驱动,307、导向板,308、上驱动臂,309、上转臂,310、上连杆,311、上刮刀,312、下驱动臂,313、下转臂,314、下连杆,315、下刮刀,316、拉簧,401、底座,402、左支架,403、右支架,404、横移油缸,405、左固定电极,406、右固定电极,407、左压杆,408、左活动电极,409、右压杆,410、右活动电极,411、左压紧油缸,412、右压紧油缸,501、定位槽,502、拍平槽,503、定位台,601、下导向块,602、上导向块,603、固定板,604、导向轴,605、弹簧,701、拍平滑板,702、拍平滑板驱动,703、上拍板,704、下拍板,705、上连板,706、下连板,707、拍平驱动,801、拨链滑板,802、拨链滑板驱动,803、拨链插板座板,804、拨链插板,805、拨链驱动,806、铰接板,807、气缸铰接板。
具体实施方式
26.为能清楚说明本方案的技术特点,下面通过具体实施方式,对本方案进行阐述。
27.如图1~15所示,本发明的一种链条自动焊接设备,包括送链装置、焊接装置4以及去毛刺装置3。
28.所述送链装置包括固定的底座1、滑接在底座上的送链板2以及将送链板向焊接装置方向推动的送链驱动9,所述送链板2为三角形,其中一个角朝向焊接装置4,送链板2通过滑轨和滑块滑接在底座1上,送链驱动9为固定在底座1上的气缸,气缸的伸缩轴安装在送链板2上,底座1上远离焊接装置4的方向还固接有两个限位块11,限位块11用来对送链板2收回时进行限位。
29.所述送链板2上朝向焊接装置4的角上固接有与焊接装置4适配的定位块5,定位块5为三角形块,其中一个角朝向焊接装置4,该角上设置有一个平面,该平面为与链环适配的
定位台503,定位台503的宽度小于链环的长度,定位台503的两侧各设有一个与链环宽度适配的定位槽501,所述定位槽501设置在与定位台503靠近的立面上,定位槽501的高度与链环的宽度相同。
30.定位块5的两侧各装有一个固定在送链板2上的导链装置6,所述送链板2上还装有设置在定位块5远离焊接装置4一侧的拍平装置7以及与链条12适配的拨链装置8。
31.所述导链装置6远离定位块5的一侧设有安装在送链板上的导向轮10,导向轮10共安装有两个且均安装在送链板2的侧面,导向轮10的转轴与链条垂直,导向轮10边缘的直径大于内部的直径,可以防止链条脱轮。
32.如图4所示,所述导链装置6的长度方向平行于对应定位槽501,使导链装置6中的链条可以沿直线进入定位槽501,两个导链装置6分别对焊接前的链条和焊接后的链条进行导向。
33.所述导链装置6包括截面为三角形的下导向块601和截面为倒三角形上导向块602,上导向块602和下导向块601分别位于链条12的上下两侧,由于链条为十字交叉排布,因此上导向块和下导向块分别插入链条相对的两个夹角内。
34.下导向块601固定在送链板2的上端面,送链板2上还固接有位于上导向块602上方的固定板603,上导向块602的上端面固接有竖向的导向轴604,导向轴604通过螺纹与上导向块602的上端面连接,固定板603上设有与导向轴604适配的导向孔,上导向块602与固定板603之间装有弹簧605,弹簧605套在导向轴604上,导向轴604的上端设置有伸出固定板603上方挡板,挡板的直径大于导向轴604的直径。
35.如图5~6所示,所述拍平装置7包括滑接在送链板2上的拍平滑板701以及将拍平滑板701向定位块5方向推动的拍平滑板驱动702,拍平滑板701通过滑轨和滑块滑接在送链板2的上端面,拍平滑板701的滑动方向与送链板2的滑动方向平行,所述拍平滑板驱动702为安装在送链板2上的气缸,气缸的伸缩轴连接在拍平滑板701上。
36.拍平滑板701上铰接有上拍板703和下拍板704,上拍板703和下拍板704铰接在与拍平滑板701焊接的立板上,上拍板703和下拍板704上下对称设置,上拍板703的一端设置在链环的上方,下拍板704的一端设置在链环的下方,定位块5上开有容上拍板703和下拍板704夹紧时所容纳的拍平槽502,拍平槽502穿过定位台503,使上拍板703和下拍板704可以在拍平槽502中对定位台503处的链环进行拍平,拍平滑板701上还装有驱动上拍板703和下拍板704反向同步旋转的拍平驱动707。
37.所述拍平驱动707为固定在拍平滑板701上的拍平气缸,上拍板703的另一端铰接有上连板705,下拍板704的另一端铰接有下连板706,上连板705和下连板706均与拍平气缸的伸缩轴铰接,上连板705和下连板706上下对称。
38.如图7、8所示,所述拨链装置8包括滑接在送链板2上的拨链滑板801、驱动拨链滑板801沿链条12行进方向移动的拨链滑板驱动802,拨链滑板801通过滑轨和滑块滑接在送链板2上,滑动方向与链条行进方向平行,拨链滑板驱动802为气缸,气缸的两端分别连接送链板2和拨链滑板801。
39.所述拨链装置8还包括铰接在拨链滑板801上的拨链插板座板803以及驱动拨链插板座板803旋转的拨链驱动805,拨链插板座板803上固接有拨链插板804,拨链插板804设置在焊接后的链条12处,且可以通过旋转插入导链装置6中的链条12中。
40.所述拨链驱动805为拨链气缸,拨链气缸与拨链滑板801铰接,拨链气缸的伸缩轴上铰接有气缸铰接板807,拨链滑板801上还铰接有铰接板806,所述铰接板806和拨链插板座板803均与气缸铰接板807铰接,使铰接板806与拨链滑板801的铰接点、拨链插板座板803与拨链滑板801的铰接点、拨链插板座板803与气缸铰接板807的铰接点、铰接板806与气缸铰接板807的铰接点共4个点形成四边形,通过拨链气缸伸缩,可以实现四边形形状的改变,从而实现拨链插板座板803的旋转,拨链气缸伸长时,拨链插板804插入链条12中。
41.如图9~11所示,所述焊接装置4包括底座401、固接在底座401上的左支架402、滑接在底座401上的右支架403以及驱动右支架403左右移动的横移油缸404,左支架402与底座401之间装有绝缘板,左支架402上固接有左固定电极405,左支架402上轴接有左压杆407,左压杆407活动端的下端面固接有位于左固定电极405上方的左活动电极408,右支架403上固接有右固定电极406,右支架403上轴接有右压杆409,右压杆409活动端的下端面固接有位于右固定电极406上方的右活动电极410,还包括分别驱动左压杆407和右压杆409转动的左压紧油缸411和右压紧油缸412。
42.如图12~15所示,所述去毛刺装置3包括固定的底板301、分别设置在链环长度方向两侧的两个夹紧块302,所述夹紧块302插入夹紧导向块303中从而滑接在底板301上,夹紧导向块303焊接在底板301上,还包括驱动夹紧块302沿链环长度方向移动的夹紧驱动304,所述夹紧驱动304为夹紧油缸,夹紧油缸的伸缩轴连接在夹紧块302上,两侧的夹紧油缸同步伸缩,从而将链环夹紧,夹紧块302端部设有与链环端部设配的凹槽,从而使夹紧时链环的端部设置在凹槽内,防止链环脱出。
43.如图12~15所示,所述去毛刺装置3还包括滑接在底板301上的刮刺板305以及驱动刮刺板305沿链环长度方向移动的刮刺驱动306,刮刺板305设置在链环长度方向的一侧,刮刺板305与其中一个夹紧块302并排设置,刮刺板305通过固定在底板301上的刮刺导向板实现滑接,所述刮刺驱动306为刮刺油缸,刮刺油缸的伸缩轴连接在刮刺板305上。
44.刮刺板305的上部铰接有上转臂309和上驱动臂308,上转臂309设置在刮刺板305靠近链环的一端,上转臂309的一端固接有上刮刀311,另一端与上连杆310的一端铰接,上连杆310的另一端与上驱动臂308的一端铰接,上驱动臂308的另一端装有上导向轮。
45.刮刺板305的下部铰接有下转臂313和下驱动臂312,下转臂313设置在刮刺板305靠近链环的一端,下转臂313的一端固接有下刮刀315,另一端与下连杆314的一端铰接,下连杆314的另一端与下驱动臂312的一端铰接,下驱动臂312的另一端装有下导向轮,下转臂313与上转臂309对称,下驱动臂312与上驱动臂308对称,下刮刀315与上刮刀311对称。
46.上导向轮和下导向轮之间设有固定的导向板307,导向板307远离链环的一端与底板301固定,导向板307的上端面和下端面各开有一个平滑的沉槽,沉槽的底部设置有一段水平段,上导向轮贴合在导向板307的上端面,下导向轮贴合在导向板307的下端面,上驱动臂308上装有将上导向轮向导向板307方向拉动的拉簧316,下驱动臂312上装有将下导向轮向导向板307方向拉动的拉簧316,上刮刀311的刀口与下刮刀315的刀口围成的区域与链环的本体适配。
47.本发明的使用方法:a.将链条12穿过两侧的导链装置6,使链环开口侧设置在导链装置6靠近焊接装置4的一侧,并将需要焊接的链环放置在定位块5的定位台503处,链条刚开始焊接时,可以在
需要焊接的链条一端安装引导链,将引导链当做焊接完成的链条,从而将第一节需要焊接的链环设置在定位台503处。
48.b.通过拍平滑板驱动702推动拍平滑板701向链环方向移动,使上拍板703的端部和下拍板704的端部位于链环上下两侧,拍平驱动707带动上拍板703和下拍板704同步夹紧,从而将定位台503处的链环拍平,此时定位台503处链环两侧的链环竖向卡在定位槽501中,使需要焊接的链环保持水平,然后拍平装置7收回。
49.c.通过送链驱动9推动送链板2向焊接装置4方向移动,使需要焊接的链环接缝处伸入焊接装置4中。
50.d.通过左活动电极408将链环接缝左侧压紧在左固定电极405上,通过右活动电极410将链环接缝右侧压紧在右固定电极406上,通过横移油缸404驱动右支架403向左侧移动,将链环接缝压紧,左固定电极405与左活动电极408连接电源正极,右活动电极410和右固定电极406连接电源负极,通电实现接缝的电阻焊;e.送链驱动9驱动送链板2收回原位,通过去毛刺装置3的夹紧驱动304驱动两个夹紧块302将焊接后的链环夹紧,刮刺驱动306驱动刮刺板305向链环方向移动,上导向轮和下导向轮移动到导向板307的沉槽位置时,通过拉簧316带动上驱动臂308和下驱动臂312转动,分别通过上连杆310和下连杆314带动上转臂309和下转臂313转动,使上刮刀311和下刮刀315夹紧链环,刮刺板305继续向链环方向移动,从而通过上刮刀311和下刮刀315将毛刺和焊渣清除,然后通过刮刺板305反向运动,使上刮刀311和下刮刀315再进行一次刮除操作,上导向轮和下导向轮移动出沉槽位置后,上刮刀311和下刮刀315与链环分离,然后通过夹紧驱动304驱动两个夹紧块302与链环分离;f.通过拨链驱动805带动拨链插板座板803旋转,使拨链插板804插入链条12中,通过拨链滑板驱动802带动拨链滑板801向链条12的行进方向移动,使链条12行进一个链环的距离,从而对下一个链环进行焊接。
51.当然,上述说明也并不仅限于上述举例,本发明未经描述的技术特征可以通过或采用现有技术实现,在此不再赘述;以上实施例及附图仅用于说明本发明的技术方案并非是对本发明的限制,参照优选的实施方式对本发明进行了详细说明,本领域的普通技术人员应当理解,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换都不脱离本发明的宗旨,也应属于本发明的权利要求保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1