一种沉井钢板水下焊接机器人的制作方法
1.本发明涉及沉井技术领域,尤其涉及一种沉井钢板水下焊接机器人。
背景技术:
2.沉井是水中施工常用的一种施工工艺。在桥梁基础施工中居多,有方形、圆形、椭圆形等形式,施工时提前浇筑首节,凝固后掏空下方,混凝土块开始下沉,随后继续浇筑上方,完成后再掏空,依次循环,直至开挖到基础底部,由壁、隔墙、支撑组成,沉井基础是以沉井法施工的地下结构物和深基础的一种型式。是先在地表制作成一个井筒状的结构物(沉井),然后在井壁的围护下通过从井内不断挖土,使沉井在自重作用下逐渐下沉,达到预定设计标高后,再进行封底,构筑内部结构。广泛应用于桥梁、烟囱、水塔的基础;水泵房、地下油库、水池竖井等深井构筑物和盾构或顶管的工作井;沉井在放入指定地点后,需要对其内壁处进行适当结构的焊接和对缝的焊接,现有的水下焊接大多数都是通过专业的焊接员穿上潜水服带上氧气瓶潜入水下对沉井的内壁进行焊接,需要焊接员严格按照操作要求进行操作,由于焊接员需要在水下完成焊接,很难对焊接的精度进行精确的掌控,容易导致实际焊接误差超出预定误差值,无法保证对沉井钢板的焊接质量,进而影响对沉井的焊接效率。
技术实现要素:
3.基于现有的水下焊接大多数都是通过专业的焊接员穿上潜水服带上氧气瓶潜入水下对沉井的内壁进行焊接,容易使焊接员处于危险中,还无法保证对沉井钢板的焊接质量,影响对沉井的焊接效率的技术问题,本发明提出了一种沉井钢板水下焊接机器人。
4.本发明提出的一种沉井钢板水下焊接机器人,包括沉井本体和固定块,多个所述固定块与所述沉井本体的上端表面活动卡接,所述固定块的内壁开设有第一安装腔,所述第一安装腔的内壁设置有升降装置,所述升降装置的下方设置有移动装置,所述移动装置的下方设置有焊接装置;所述升降装置由安装在第一安装腔内的第一电机、第一电机的主轴表面固定套接的卷绕辊和卷绕辊表面缠绕的牵引绳构成;所述移动装置由第一安装盘、第一安装盘的下方通过螺栓连接的第二安装盘、第一安装盘的内顶壁固定安装的第二电机和第二电机主轴表面固定连接的第一齿盘构成;所述焊接装置由第三安装盘、第三安装盘上表面固定连接的弧形连接块和第三安装盘周侧面旋转套接的操作环构成。
5.优选地,其中一个所述牵引绳的内壁包裹有连接导线,所述卷绕辊的外表面与所述第一安装腔的内壁活动套接,所述第一安装腔的一侧内壁开设有导向孔,所述牵引绳通过所述导向孔延伸至固定块的外部;通过上述技术方案,达到了通过升降装置控制第一电机带动卷绕辊进行旋转,控制对牵引绳的下放长度进行控制,进而控制移动装置下降的深度,同时,由牵引绳内部包裹
的连接导线对移动装置进行供电。
6.优选地,所述第一安装盘和第二安装盘的相对表面均设置有内凹,且多个内凹处均卡接有电动伸缩杆,所述电动伸缩杆的一端固定连接有第一齿轮,所述第一齿轮与所述第一齿盘啮合传动,所述电动伸缩杆的另一端外表面旋转套接有安装盒;通过上述技术方案,达到了通过第二电机带动第一齿盘旋转,进而带动第一齿轮进行旋转,进而带动电动伸缩杆进行旋转,电动伸缩杆的另一端带动第一锥形齿轮旋转。
7.优选地,所述电动伸缩杆的另一端表面固定连接有第一锥形齿轮,所述安装盒的内壁旋转套接有连接杆,所述连接杆的两端均固定连接有移动轮,所述连接杆的外表面固定连接有第二锥形齿轮,所述第一锥形齿轮与所述第二锥形齿轮啮合传动;通过上述技术方案,达到了电动伸缩杆的另一端带动第一锥形齿轮旋转,第一锥形齿轮带动与之啮合的第二锥形齿轮进行旋转,达到带动移动轮旋转。
8.优选地,所述移动轮的外表面固定套接有防滑环,所述防滑环的周侧面呈内凹形状,且内凹处设置有防滑纹,所述第一安装盘的上表面开设有环形连接槽,所述环形连接槽的下端贯穿并延伸至第二安装盘的下表面;通过上述技术方案,达到了移动轮表面的防滑环使得移动装置可以随着移动轮的旋转而下降,防滑纹增加防滑环与沉井本体的附着力,进而保证移动装置能够平稳的下降。
9.优选地,所述弧形连接块的外表面与所述环形连接槽的内壁活动插接,弧形连接块的上端外表面螺纹连接有限位环,所述第三安装盘的周侧面开设有环形滑槽,所述环形滑槽的横截面形状为t形形状,所述环形滑槽的内壁旋转套接有滑环,所述滑环外部的周侧面与所述操作环的内壁固定连接;通过上述技术方案,达到了通过滑环将第三安装盘与操作环之间进行连接,使得操作环可以在第三安装盘的周侧面进行旋转。
10.优选地,所述操作环的周侧面开设有伸缩口,所述伸缩口的内壁活动套接有焊把,所述焊把的一端内壁卡接有焊条,所述焊把的末端固定连接有支撑块,所述支撑块的上表面固定连接有导向柱;通过上述技术方案,达到了通过操作环旋转时,由于伸缩口对焊把的周向进行限位,并通过支撑块对导向柱进行连接。
11.优选地,所述第三安装盘的周侧面开设有活动口,所述活动口的内顶壁开设有导向槽,所述焊把的末端延伸至活动口的内部,且所述导向柱的外表面与所述导向槽的内壁滑动插接,两个所述滑环的内圈表面固定连接有啮合齿;通过上述技术方案,达到了伸缩口对焊把的周向进行限位,使得焊把只能伸缩,通过弧形的导向槽对导向柱的导向,使得焊把在操作环的旋转下,随着旋转缓慢向外部扩张。
12.优选地,所述第三安装盘的内壁开设有第二安装腔,所述第二安装腔的内顶壁固定安装有第三电机,所述第三电机的主轴表面固定套接有第二齿盘,所述第二齿盘与所述啮合齿啮合带动滑环旋转;通过上述技术方案,达到了通过第三电机带动第二齿盘进行旋转,进而带动操作环进行旋转。
13.优选地,所述第三安装盘的上表面固定安装有接电块,所述接电块的上端与第二安装盘的下表面活动套接,所述接电块的上端周侧面固定连接有电极环,所述电极环的一
侧表面固定连接有正极电极片,所述接电块的下表面固定连接有电极块,所述电极块的上表面固定连接有负极电极片,所述电极环与电极块之间通过连接导线连接;通过上述技术方案,达到了操作环旋转时,由于伸缩口对焊把的周向进行限位,使得焊把只能伸缩,通过导向槽对导向柱的导向,使得焊把在操作环的旋转下,随着旋转缓慢向外部扩张。
14.本发明中的有益效果为:1、通过设置升降装置,控制升降装置内部的第一电机启动,进而带动卷绕辊进行旋转,控制对牵引绳的下放长度进行控制,进而在移动装置下降过程中对移动装置进行基础的支撑,进而控制移动装置的下降的深度,使得移动装置可以准确的移动至需要焊接的沉井本体部位。
15.2、通过设置移动装置,控制移动装置内部的第二电机带动第一齿盘旋转,进而带动与之啮合的第一齿轮进行旋转,带动电动伸缩杆进行旋转,电动伸缩杆的另一端带动第一锥形齿轮旋转,第一锥形齿轮带动与之啮合的第二锥形齿轮进行旋转,达到带动移动轮旋转,移动轮表面的防滑环使得移动装置可以随着移动轮的旋转而下降,防滑纹增加防滑环与沉井本体的附着力,进而保证移动装置能够平稳的下降。
16.3、通过设置焊接装置,焊接装置通过接电块对焊接装置进行供电,第三电机带动第二齿盘进行旋转,进而带动操作环进行旋转,操作环旋转时,由于伸缩口对焊把的周向进行限位,使得焊把只能伸缩,通过弧形的导向槽对导向柱的导向,使得焊把在操作环的旋转下,随着旋转缓慢向外部扩张,进而完成焊条在对沉井本体焊接消耗的同时,对焊条不断的向前供应,进而完成对沉井本体的焊接。
附图说明
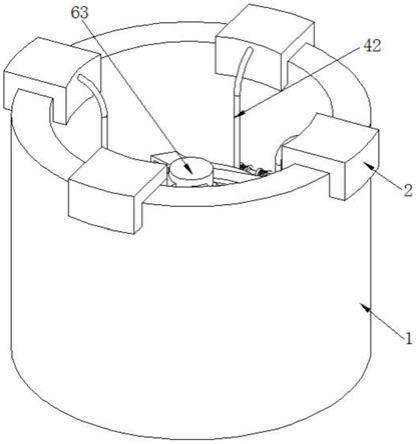
17.图1为本发明提出的一种沉井钢板水下焊接机器人的示意图;图2为本发明提出的一种沉井钢板水下焊接机器人的固定块结构剖视图;图3为本发明提出的一种沉井钢板水下焊接机器人的限位环结构立体图;图4为本发明提出的一种沉井钢板水下焊接机器人的移动装置立体图;图5为本发明提出的一种沉井钢板水下焊接机器人的第二安装盘结构剖视图;图6为本发明提出的一种沉井钢板水下焊接机器人的第一齿盘结构立体图;图7为本发明提出的一种沉井钢板水下焊接机器人的弧形连接块结构立体图;图8为本发明提出的一种沉井钢板水下焊接机器人的焊接装置爆炸图;图9为本发明提出的一种沉井钢板水下焊接机器人的第二齿盘结构剖视图;图10为本发明提出的一种沉井钢板水下焊接机器人的活动口结构立体图;图11为本发明提出的一种沉井钢板水下焊接机器人的第三安装盘结构剖视图;图12为本发明提出的一种沉井钢板水下焊接机器人的防滑环结构剖视图;图13为本发明提出的一种沉井钢板水下焊接机器人的图2中a处结构放大图。
18.图中:1、沉井本体;2、固定块;3、第一安装腔;4、第一电机;41、卷绕辊;42、牵引绳;43、导向孔;5、第一安装盘;51、第二安装盘;52、第二电机;53、第一齿盘;54、电动伸缩杆;55、第一齿轮;56、安装盒;57、第一锥形齿轮;58、连接杆;59、移动轮;510、第二锥形齿轮;511、防滑环;512、防滑纹;513、环形连接槽;6、第三安装盘;61、弧形连接块;62、操作环;63、
限位环;64、环形滑槽;65、滑环;66、伸缩口;67、焊把;68、焊条;69、支撑块;610、导向柱;611、活动口;612、导向槽;613、啮合齿;614、第二安装腔;615、第三电机;616、第二齿盘;617、接电块;618、电极环;619、正极电极片;620、电极块;621、负极电极片。
具体实施方式
19.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
20.参照图1
‑
13,一种沉井钢板水下焊接机器人,包括沉井本体1、固定块2、升降装置、移动装置和焊接装置;为了对升降装置、移动装置和焊接装置进行支撑,在沉井本体1的上端表面活动卡接多个与沉井本体1的沉井壁相贴合的凹形固定块2,设置凹形固定块2,能够很好的与沉井本体1的顶部实现插接固定,无需其他固定或紧固的结构,且对称分布的凹形固定块2,不仅容易安装,且对称设置后更能保证各部件之间受力均匀,不会出现倾倒或歪斜的问题,具有随用随装,随拆随走的特点,安装和拆卸速度快。
21.参照图1
‑
2所示,升降装置,设置在固定块2的下方,为了对卷绕辊41进行安装,在固定块2的内壁开设第一安装腔3,为了对卷绕辊41的旋转进行控制,在第一安装腔3的一侧内壁固定安装第一电机4,第一电机4的主轴与卷绕辊41进行固定套接,并在卷绕辊41上缠绕牵引绳42,并在第一安装腔3的一侧内壁开设导向孔43,牵引绳42通过导向孔43将牵引绳42的一端延伸至固定块2的外部,并使牵引绳42的末端与移动装置的上表面固定连接;牵引绳42制造技术不仅成熟,且可以承受相当大的重量还不会出现变形,相比其他上下拉升结构,容易实现,重要的是方便携带,便于运输和牵引的连接,这对于户外的沉井来说,尤为重要,沉井一般建造于水上、偏僻,土质容易出现松动的地方较多,而牵引绳42占用体积小,所以无论在受力要求方面还是运输方面,都是比较适合的。
22.控制升降装置内部的第一电机4启动,进而带动卷绕辊41进行旋转,控制对牵引绳42的下放长度进行控制,进而在移动装置下降过程中对移动装置进行基础的支撑,进而控制移动装置的下降的深度,使得移动装置可以准确的移动至需要焊接的沉井本体1部位;参照图2
‑
6和图12,移动装置,设置于升降装置的下方,为了对电动伸缩杆54进行安装,在第一安装盘5的下表面设置第二安装盘51,并通过螺栓将第一安装盘5和第二安装盘51之间进行紧密连接,在第一安装盘5与第二安装盘51的相对表面设置内凹处,两个内凹处相对,进而将电动伸缩杆54安装在第一安装盘5与第二安装盘51之间,为了驱动移动轮59能够带动移动装置向下移动,在第一安装盘5的内顶壁固定安装第二电机52,并在第二安装盘51的内底壁设置第一齿盘53,并将第一齿盘53与第二电机52的主轴表面进行套接,使得第二电机52带动第一齿盘53进行旋转;进一步地,在电动伸缩杆54靠近第一齿盘53的一端固定连接第一齿轮55,并使第一齿轮55与第一齿盘53进行啮合,进而带动电动伸缩杆54进行旋转,通过电动伸缩杆54另一端固定连接的第一锥形齿轮57与安装盒56内通过连接杆58连接的第二锥形齿轮510进行啮合,进而带动连接杆58进行旋转,同时,带动连接杆58两端外表面的移动轮59进行旋转,为了使移动轮59可以在沉井本体1内壁稳定的行走,在移动轮59的外表面固定套接周侧面呈内凹形状结构的防滑环511,并在防滑环511的内凹槽处设置防滑纹512;
控制移动装置内部的第二电机52带动第一齿盘53旋转,进而带动与之啮合的第一齿轮55进行旋转,带动电动伸缩杆54进行旋转,电动伸缩杆54的另一端带动第一锥形齿轮57旋转,第一锥形齿轮57带动与之啮合的第二锥形齿轮510进行旋转,达到带动移动轮59旋转,移动轮59表面的防滑环511使得移动装置可以随着移动轮59的旋转而下降,防滑纹512增加防滑环511与沉井本体1的附着力,进而保证移动装置能够平稳的下降。
23.参照图1
‑
3、图7
‑
11和图13,焊接装置,设置于移动装置的下方,为了对焊接装置与移动装置之间进行连接,在第三安装盘6的上表面固定连接弧形连接块61,多个弧形连接块61组合形成圆环形状,将多个弧形连接块61分别与多个环形连接槽513的内壁插接,并在上端外表面设置限位环63,在弧形连接块61的上端表面螺纹连接限位环63,通过限位环63对弧形连接块61进行固定,进而对焊接装置进行固定;为了对操作环62与第三安装盘6之间进行连接,在第三安装盘6的周侧面设置操作环62,在第三安装盘6的周侧面开设横截面形状呈t形结构的环形滑槽64,并且在环形滑槽64的内壁旋转套接滑环65,通过操作环62与第三安装盘6之间的滑环65将两者之间进行连接,在操作环62的周侧面开设伸缩口66,并将焊把67插接在伸缩口66内,在焊把67靠近第三安装盘6内部的一端固定连接支撑块69,并在支撑块69的上表面固定连接导向柱610,为了对操作环62进行驱动,在滑环65的内圈表面固定连接啮合齿613,在第三安装盘6的内壁开设第二安装腔614,并在第二安装腔614的内顶壁固定安装第三电机615,在第二安装腔614的内壁旋转套接第二齿盘616,通过第三电机615带动第二齿盘616进行旋转,并通过第二齿盘616与啮合齿613的啮合带动操作环62进行驱动;为了控制焊条68在操作环62旋转的同时缓慢向外移动,在第三安装盘6的周侧面开设活动口611,并在活动口611的内顶壁开设导向槽612,导向槽612的轨迹呈弧形向外移动,为了对焊接装置进行供电,在第三安装盘6的上表面固定安装接电块617,并通过接电块617的上端与第二安装盘51的下表面活动套接,并在接电块617的上端周侧面固定连接电极环618,在电极环618的一侧表面固定连接正极电极片619,在接电块617的下表面固定连接电极块620,并在电极块620的上表面固定连接负极电极片621,电极环618与电极块620之间通过连接导线连接,进而达到对焊接装置进行接电的效果;焊接装置通过接电块617对焊接装置进行供电,第三电机615带动第二齿盘616进行旋转,进而带动操作环62进行旋转,操作环62旋转时,由于伸缩口66对焊把67的周向进行限位,使得焊把67只能伸缩,通过弧形的导向槽612对导向柱610的导向,使得焊把67在操作环62的旋转下,随着旋转缓慢向外部扩张,进而完成焊条68在对沉井本体1焊接消耗的同时,对焊条68不断的向前供应,进而完成对沉井本体1的焊接。
24.工作原理:通过plc可编程控制器控制升降装置、移动装置和焊接装置的运行,使用时,通过升降装置控制第一电机4带动卷绕辊41进行旋转,控制对牵引绳42的下放长度进行控制,进而控制移动装置下降的深度,同时,由牵引绳42内部包裹的连接导线对移动装置进行供电,同时,移动装置通过第二电机52带动第一齿盘53旋转,进而带动第一齿轮55进行旋转,进而带动电动伸缩杆54进行旋转,电动伸缩杆54的另一端带动第一锥形齿轮57旋转,第一锥形齿轮57带动与之啮合的第二锥形齿轮510进行旋转,达到带动移动轮59旋转,通过移动轮59表面的防滑环511与沉井内部接触,进而保证移动装置能够平稳的下降,下降到指定深度后,控制焊接装置对沉井本体1进行焊接;
焊接装置通过接电块617对焊接装置进行供电,第三电机615带动第二齿盘616进行旋转,进而带动操作环62进行旋转,操作环62旋转时,由于伸缩口66对焊把67的周向进行限位,使得焊把67只能伸缩,通过导向槽612对导向柱610的导向,使得焊把67在操作环62的旋转下,随着旋转缓慢向外部扩张,进而完成对沉井本体1的焊接。
25.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1