一种钢丝导开控制方法以及钢丝导开装置与流程
1.本发明涉及一种钢丝导开控制方法以及钢丝导开装置,属于轮胎生产机械设备技术领域。
背景技术:
2.轮胎轮辋扣合的钢丝圈主要目的是增强轮胎根部的刚性,通常钢丝圈采用细钢丝通过钢丝圈缠绕生产线缠绕成规则六边型形状生产完成。以往的钢丝圈缠绕生产线导开装置采用的是无动力被动拉取方式,即钢丝盘设置于导开装置上,钢丝在钢丝盘上引出经导向轮导向后进入后续工位,后续工位的机械设备在作业时会对钢丝进行拖拽,从而拉动钢丝盘旋转导开钢丝。但这种被动拉取方式会造成钢丝受到的拉力过大,在设备高速运行的情况下突然停车也会造成导开装置上的钢丝松散脱落甚至断裂。
技术实现要素:
3.因此,本发明的目的在于提供一种钢丝导开控制方法以及钢丝导开装置,通过电机驱动钢丝盘转动主动导开钢丝,从而减小钢丝张力,提高在高速停车过程中的稳定性。
4.为了实现上述目的,本发明的一种钢丝导开控制方法,包括:以电源频率f驱动变频电机带动钢丝盘旋转;电源频率;其中,v为已知的在后续工位中对钢丝拖拽的线速度,c为钢丝盘上最外圈钢丝的周长,f为已知的变频电机的额定频率,n为已知的变频电机的额定转速,a为导开速度系数;所述导开速度系数a通过以下公式获得:;其中,为摆动臂角位移实际模拟量,为摆动臂角位移模拟量最大值,为摆动臂角位移模拟量最小值;钢丝在钢丝盘上引出后绕过位于摆动臂上的摆动轮,通过角位移传感器实时获取摆动臂角位移实际模拟量,摆动臂角位移模拟量最大值为摆动臂最大摆角时的预设值,摆动臂角位移模拟量最小值为摆动臂最小摆角时的预设值。
5.钢丝盘上最外圈钢丝的周长c通过以下公式获得:;其中,为钢丝盘上最外圈钢丝位置的实际模拟量,为最外圈钢丝位置模拟量最大值,为最外圈钢丝位置模拟量最小值,为已知的超声波测距传感器距离钢丝盘轴线的距离,为已知的超声波测距传感器距离空卷钢丝盘的距离,为已知的超声波测距传感器距离满卷钢丝盘的距离;通过超声波测
距传感器实时获取钢丝盘上最外圈钢丝位置的实际模拟量,最外圈钢丝位置模拟量最大值为与超声波测距传感器距离空卷钢丝盘的距离相对应的预设值,最外圈钢丝位置模拟量最小值为与超声波测距传感器距离满卷钢丝盘的距离相对应的预设值。
6.所述钢丝导开控制方法还包括获取钢丝盘上钢丝剩余量的步骤,钢丝剩余量通过以下公式获得:。
7.所述钢丝导开控制方法还包括余量报警的步骤,即当钢丝剩余量小于预设值后进行报警。
8.本发明还提供一种钢丝导开装置,用于实现如前所述的钢丝导开控制方法,包括变频电机、连接于所述变频电机动力输出端的钢丝盘安装轴、摆动臂、角位移传感器以及超声波测距传感器,所述钢丝盘安装轴上设置有用于固定安装钢丝盘的安装工位,所述超声波测距传感器设置于与安装工位正对的位置用于采集超声波测距传感器到钢丝盘的距离;所述角位移传感器设置于摆动臂上用于采集摆动臂的角位移。
9.所述钢丝导开装置还包括固定臂,在所述固定臂上设置有导开轮,钢丝在钢丝盘上引出后绕过所述导开轮,再经摆动臂上的摆动轮导向后接入后续工位。
10.采用上述技术方案,本发明的钢丝导开控制方法以及钢丝导开装置,通过自动计算导开跟随速度,即驱动变频电机转动的电源频率f,则能够自动实时调整钢丝盘的转动速度,减小了人工的计算和调试时间,有效减小了钢丝张力,提高钢丝导开作业的稳定性。
附图说明
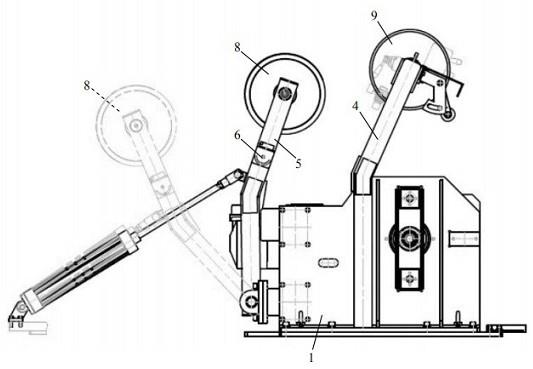
11.图1为本发明中钢丝导开装置的结构示意图。
12.图2为本发明中钢丝导开装置的侧视图。
具体实施方式
13.以下通过附图和具体实施方式对本发明作进一步的详细说明。
14.如图1、2所示,本发明提供一种钢丝导开装置,包括框架总成1、设置于框架总成1上的变频电机2、连接于所述变频电机2动力输出端的钢丝盘安装轴3、固定臂4、摆动臂5、角位移传感器6以及超声波测距传感器7。
15.所述钢丝盘安装轴3上设置有用于固定安装钢丝盘的安装工位,所述超声波测距传感器7设置于与安装工位正对的位置用于采集超声波测距传感器7到钢丝盘的距离。超声波测距传感器7距离钢丝盘轴线的距离为已知值。对于规格相同的钢丝盘,可以预先采集超声波测距传感器7距离满卷钢丝盘的距离以及超声波测距传感器7距离空卷钢丝盘的距离。预设与超声波测距传感器7距离空卷钢丝盘的距离相对应的最外圈钢丝位置模拟量最大值,以及与超声波测距传感器7距离满卷钢丝盘的距离相对应的最外圈钢丝位置模拟量最小值。
16.在所述固定臂4上设置有导开轮9,在所述摆动臂5上设置有摆动轮8,钢丝在钢丝盘上引出后绕过所述导开轮9,再经摆动臂5上的摆动轮8导向后接入后续工位。在后续工位
的设备会对钢丝施加牵引力,并且对钢丝拖拽的线速度v为已知值。
17.在钢丝的作用下使得摆动臂5形成一定摆角,当牵引力较大时,摆动臂5的摆角较大,牵引力较小时,摆动臂5的摆角较小。所述角位移传感器6设置于摆动臂5上用于采集摆动臂5的角位移。
18.预设当摆动臂5的摆角最大时的摆动臂5角位移模拟量最大值为,以及当摆动臂5的摆角最小时的摆动臂5角位移模拟量最小值为,通过角位移传感器6实时获取摆动臂5角位移实际模拟量。
19.通过上述钢丝导开装置,可以实现以下钢丝导开控制方法,即:以电源频率f驱动变频电机2带动钢丝盘旋转;电源频率f通过以下公式获得:;其中, c为钢丝盘上最外圈钢丝的周长,f为已知的变频电机2的额定频率,n为已知的变频电机2的额定转速,a为导开速度系数。
20.具体而言,钢丝盘上最外圈钢丝的周长c为:,其中r为钢丝盘上实时的最外圈钢丝的半径,通过以下公式获得:;其中为已经消耗的钢丝在钢丝盘径向上的厚度,通过以下公式获得:。
21.由此可见,钢丝盘上最外圈钢丝的周长c通过以下公式获得:。
22.作为优选的实施方式,所述导开速度系数a为:。
23.除此之外,所述钢丝导开控制方法还包括获取钢丝盘上钢丝剩余量的步骤,钢丝剩余量通过以下公式获得:。
24.所述钢丝导开控制方法还包括余量报警的步骤,即当钢丝剩余量小于预设值后进行报警。
25.采用上述技术方案,本发明的钢丝导开控制方法以及钢丝导开装置,通过自动计算导开跟随速度,即驱动变频电机2转动的电源频率f,则能够自动实时调整钢丝盘的转动速度,减小了人工的计算和调试时间,有效减小了钢丝张力,提高钢丝导开作业的稳定性。
26.显然,上述实施例仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变
动仍处于本发明创造的保护范围之中。
技术特征:
1.一种钢丝导开控制方法,其特征在于,包括:以电源频率f驱动变频电机带动钢丝盘旋转;电源频率;其中,v为已知的在后续工位中对钢丝拖拽的线速度,c为钢丝盘上最外圈钢丝的周长,f为已知的变频电机的额定频率,n为已知的变频电机的额定转速,a为导开速度系数。2.如权利要求1所述的钢丝导开控制方法,其特征在于,所述导开速度系数a通过以下公式获得:;其中,为摆动臂角位移实际模拟量,为摆动臂角位移模拟量最大值,为摆动臂角位移模拟量最小值;钢丝在钢丝盘上引出后绕过位于摆动臂上的摆动轮,通过角位移传感器实时获取摆动臂角位移实际模拟量,摆动臂角位移模拟量最大值为摆动臂最大摆角时的预设值,摆动臂角位移模拟量最小值为摆动臂最小摆角时的预设值。3.如权利要求1所述的钢丝导开控制方法,其特征在于,钢丝盘上最外圈钢丝的周长c通过以下公式获得:;其中,为钢丝盘上最外圈钢丝位置的实际模拟量,为最外圈钢丝位置模拟量最大值,为最外圈钢丝位置模拟量最小值,为已知的超声波测距传感器距离钢丝盘轴线的距离,为已知的超声波测距传感器距离空卷钢丝盘的距离,为已知的超声波测距传感器距离满卷钢丝盘的距离;通过超声波测距传感器实时获取钢丝盘上最外圈钢丝位置的实际模拟量,最外圈钢丝位置模拟量最大值为与超声波测距传感器距离空卷钢丝盘的距离相对应的预设值,最外圈钢丝位置模拟量最小值为与超声波测距传感器距离满卷钢丝盘的距离相对应的预设值。4.如权利要求3所述的钢丝导开控制方法,其特征在于,所述钢丝导开控制方法还包括获取钢丝盘上钢丝剩余量的步骤,钢丝剩余量通过以下公式获得:。5.如权利要求4所述的钢丝导开控制方法,其特征在于,所述钢丝导开控制方法还包括余量报警的步骤,即当钢丝剩余量小于预设值后进行报警。6.一种钢丝导开装置,其特征在于:用于实现如权利要求1
‑
5任一项所述的钢丝导开控制方法,包括变频电机、连接于所述变频电机动力输出端的钢丝盘安装轴、摆动臂、角位移传感器以及超声波测距传感器,所述钢丝盘安装轴上设置有用于固定安装钢丝盘的安装工位,所述超声波测距传感器设置于与安装工位正对的位置用于采集超声波测距传感器到钢丝盘的距离;所述角位移传感器设置于摆动臂上用于采集摆动臂的角位移。7.如权利要求6所述的钢丝导开装置,其特征在于:所述钢丝导开装置还包括固定臂,在所述固定臂上设置有导开轮,钢丝在钢丝盘上引出后绕过所述导开轮,再经摆动臂上的
摆动轮导向后接入后续工位。
技术总结
本发明公开了一种钢丝导开装置,包括变频电机、连接于所述变频电机动力输出端的钢丝盘安装轴、摆动臂、角位移传感器以及超声波测距传感器,所述钢丝盘安装轴上设置有用于固定安装钢丝盘的安装工位,所述超声波测距传感器设置于与安装工位正对的位置用于采集超声波测距传感器到钢丝盘的距离;所述角位移传感器设置于摆动臂上用于采集摆动臂的角位移。本发明还提供一种钢丝导开控制方法,通过所述钢丝导开装置实现。采用上述技术方案,能够自动实时调整钢丝盘的转动速度,减小了人工的计算和调试时间,有效减小了钢丝张力,提高钢丝导开作业的稳定性。业的稳定性。业的稳定性。
技术研发人员:马松 张晓辰
受保护的技术使用者:天津赛象科技股份有限公司
技术研发日:2021.09.29
技术公布日:2021/11/2
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1