一种双机器人塔脚焊接装置的制作方法
1.本实用新型涉及一种焊接装置,具体说是一种双机器人塔脚焊接装置。
背景技术:
2.焊接机器人是塔脚焊接加工的常用设备,市场上现有同类塔脚焊接机器人种类较多,由于塔角形状相似,但是品种多,批量小,单6 轴焊接机器人焊接,编程繁琐,效率低下,焊接质量得不到保证,塔脚焊接质量要求严格,目前大部分采用人工焊接,工艺为单面焊接,反面碳弧气刨清根后焊接,工艺比较复杂,焊接效率较低,另外焊接机器人跟变位机不在同一平台,需要分别固定,占地面积大。
技术实现要素:
3.为了解决上述问题,本实用新型的目的是提供一种双机器人塔脚焊接装置。
4.为实现上述目的,本实用新型的技术方案为:一种双机器人塔脚焊接装置,包括焊接平台总成、焊接机器人总成、变位机总成和清枪器总成,焊接平台总成包括平台和设置在平台四周的竖直的支撑板,焊接机器人总成包括焊接机器人和固定在支撑平台表面的机器人底座,焊接机器人固定在机器人底座上,变位机总成包括变位机支架和旋转台,旋转台一端的支撑转轴转动支撑在其中一侧变位机支架顶部的轴承座内,旋转台的另一端支撑转轴与变位机支架另一侧顶部的旋转减速电机的动力输出轴固定连接,塔脚固定总成设置在旋转台的表面中心位置,塔脚固定总成包括塔脚固定总成包括转盘、第一转台横梁总成和第二转台横梁总成,第一转台横梁总成和第二转台横梁总成在中间部位交叉固定连接,且相互垂直,第一转台横梁总成和第二转台横梁总成的内部分别设置有通过丝杆和调节手轮驱动滑动的塔脚夹紧块,清枪器总成由清枪器和清枪器支架组成,两个机器人底座分别固定在变位机总成两端的同一侧,变位机总成两端的另外同一侧分别固定有于机器人底座相对应的清枪器支架,清枪器固定在清枪器支架上。
5.进一步地,机器人底座的下端通过多块竖直的三角连接板与平台表面固定连接。
6.进一步地,每块支撑板的下端分别固定支撑有水平的底板,每块支撑板分别拧有贯穿平台的支撑螺栓,支撑螺栓的下端与底板内端上表面紧贴。
7.进一步地,机器人底座为圆柱形,且下端设置有多个三角连接板与平台固定连接。
8.通过以上设置本实用新型具有以下优点:
9.1、采用双机器人焊接,大大的提生了焊接效率;
10.2、自动化程度高,减轻了工人大的劳动强度,可实现24小时连续生产,提高生产效率;
11.3、多个塔脚夹紧块对塔脚进行固定,不仅夹持牢固,同时便于取下塔脚,操作便捷快速降低了工人的劳动强度;
12.4、把变位机和焊接机器人集成在一个平台上,减小了占地面积。
13.5、提高和稳定焊接质量,提高产品质量的一致性。
14.6、采用机器焊接代替人工,人工参与更少,消除了工人操作的安全隐患。
附图说明
15.现结合附图对本实用新型做进一步说明。
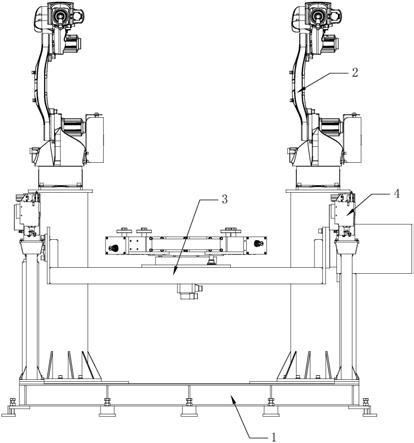
16.图1为本实用新型的主视结构示意图;
17.图2为本实用新型的侧视结构示意图;
18.图3为本实用新型的俯视结构示意图;
19.图4为本实用新型焊接平台总成的俯视结构示意图;
20.图5为本实用新型焊接平台总成的主视结构示意图;
21.图6为本实用新型变位机总成的主视结构示意图;
22.图7为本实用新型变位机总成的俯视结构示意图;
23.图8为本实用新型变位机总成的侧视结构示意图;
24.图9为本实用新型焊接机器人总成的立体结构示意图;
25.图10为本实用新型清枪器总成的立体结构示意图。
具体实施方式
26.如图1
‑
10所示,一种双机器人塔脚焊接装置,包括焊接平台总成 1、焊接机器人总成2、变位机总成3和清枪器总成4,焊接平台总成 1包括平台101和设置在平台101四周的竖直的支撑板102,焊接机器人总成2包括焊接机器人201和固定在支撑平台101表面的机器人底座202,焊接机器人201固定在机器人底座202上,变位机总成3包括变位机支架301和旋转台302,旋转台302一端的支撑转轴转动支撑在其中一侧变位机支架301顶部的轴承座303内,旋转台302的另一端支撑转轴与变位机支架301另一侧顶部的旋转减速电机304的动力输出轴固定连接,塔脚固定总成设置在旋转台302的表面中心位置,塔脚固定总成包括塔脚固定总成包括转盘305、第一转台横梁总成306 和第二转台横梁总成307,第一转台横梁总成306和第二转台横梁总成307在中间部位交叉固定连接,且相互垂直,第一转台横梁总成306 和第二转台横梁总成307的内部分别设置有通过丝杆和调节手轮308 驱动滑动的塔脚夹紧块309,清枪器总成4由清枪器401和清枪器支架402组成,两个机器人底座202分别固定在变位机总成3两端的同一侧,变位机总成3两端的另外同一侧分别固定有于机器人底座202 相对应的清枪器支架402,清枪器401固定在清枪器支架402上,焊接机器人201和清枪器401为目前常用的设备。
27.机器人底座202的下端通过多块竖直的三角连接板203与平台 101表面固定连接。
28.每块支撑板102的下端分别固定支撑有水平的底板103,每块支撑板102分别拧有贯穿平台101的支撑螺栓104,支撑螺栓104的下端与底板103内端上表面紧贴,通过调节支撑螺栓104的高低调节支撑平台101的平衡。
29.机器人底座202为圆柱形,且下端设置有多个三角连接板203与平台101固定连接。
30.本实用新型工作原理:首先固定好塔脚,固定塔脚时,转动调节手轮308带动丝杆转动,从而带动相应的塔脚夹紧块309在第一转台横梁总成306和第二转台横梁总成307上滑动,第一转台横梁总成306 和第二转台横梁总成307相互垂直,相当于移动四个塔脚夹紧块309 对塔脚进行固定,不仅夹持牢固,同时便于取下,根据塔脚大小来输入需要的参数完
成程序编写,按下启动按钮,通过变位机总成3的转动实现塔脚旋转、通过旋转减速电机304驱动旋转台302摆动,另外通过机器人姿态的变化来完成对整个塔脚焊接。
31.以上所述仅为本实用新型示意性的具体实施方式,并非用以限定本实用新型的范围。任何本领域的技术人员,在不脱离本实用新型的构思和原则的前提下所作出的等同变化与修改,均应属于本实用新型保护的范围。
技术特征:
1.一种双机器人塔脚焊接装置,其特征在于:包括焊接平台总成(1)、焊接机器人总成(2)、变位机总成(3)和清枪器总成(4),焊接平台总成(1)包括平台(101)和设置在平台(101)四周的竖直的支撑板(102),焊接机器人总成(2)包括焊接机器人(201)和固定在支撑平台(101)表面的机器人底座(202),焊接机器人(201)固定在机器人底座(202)上,变位机总成(3)包括变位机支架(301)和旋转台(302),旋转台(302)一端的支撑转轴转动支撑在其中一侧变位机支架(301)顶部的轴承座(303)内,旋转台(302)的另一端支撑转轴与变位机支架(301)另一侧顶部的旋转减速电机(304)的动力输出轴固定连接,塔脚固定总成设置在旋转台(302)的表面中心位置,塔脚固定总成包括塔脚固定总成包括转盘(305)、第一转台横梁总成(306)和第二转台横梁总成(307),第一转台横梁总成(306)和第二转台横梁总成(307)在中间部位交叉固定连接,且相互垂直,第一转台横梁总成(306)和第二转台横梁总成(307)的内部分别设置有通过丝杆和调节手轮(308)驱动滑动的塔脚夹紧块(309),清枪器总成(4)由清枪器(401)和清枪器支架(402)组成,两个机器人底座(202)分别固定在变位机总成(3)两端的同一侧,变位机总成(3)两端的另外同一侧分别固定有于机器人底座(202)相对应的清枪器支架(402),清枪器(401)固定在清枪器支架(402)上。2.如权利要求1所述的一种双机器人塔脚焊接装置,其特征在于:机器人底座(202)的下端通过多块竖直的三角连接板(203)与平台(101)表面固定连接。3.如权利要求1所述的一种双机器人塔脚焊接装置,其特征在于:每块支撑板(102)的下端分别固定支撑有水平的底板(103),每块支撑板(102)分别拧有贯穿平台(101)的支撑螺栓(104),支撑螺栓(104)的下端与底板(103)内端上表面紧贴。4.如权利要求1所述的一种双机器人塔脚焊接装置,其特征在于:机器人底座(202)为圆柱形,且下端设置有多个三角连接板(203)与平台(101)固定连接。
技术总结
本实用新型公开了一种双机器人塔脚焊接装置,包括焊接平台总成、焊接机器人总成、变位机总成和清枪器总成,焊接平台总成包括平台和设置在平台四周的竖直的支撑板,焊接机器人总成包括焊接机器人和固定在支撑平台表面的机器人底座,焊接机器人固定在机器人底座上,变位机总成包括变位机支架和旋转台,旋转台一端的支撑转轴转动支撑在其中一侧变位机支架顶部的轴承座内,旋转台的另一端支撑转轴与变位机支架另一侧顶部的旋转减速电机的动力输出轴固定连接。本实用新型采用双机器人焊接,大大的提生了焊接效率,多个塔脚夹紧块对塔脚进行固定,不仅夹持牢固,同时便于取下塔脚,操作便捷快速,降低了工人的劳动强度。降低了工人的劳动强度。降低了工人的劳动强度。
技术研发人员:徐夕玲 周永刚 张加友 王春瑜 王磊磊 赵东方 白晓锋 杨金健 蒋宝炜
受保护的技术使用者:山东省青腾机械科技有限公司
技术研发日:2021.01.29
技术公布日:2021/10/26
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1