波纹板的机器人自动化高速焊接装置的制作方法
1.本实用新型涉及一种机器人自动化焊接技术领域,特别涉及一种波纹板的机器人自动化高速焊接装置。
背景技术:
2.集装箱在现代物流行业中发挥了极大作用,并且集装箱的加工制造技术正在不断发展。集装箱侧板与顶板结构一般为具有等间隔凹槽的波纹板,在与上下梁焊接的过程中,由于波纹板角焊缝较多,焊缝宽度不均匀,导致焊接工作量大且难度较高。目前波纹板的焊接主要采用手工焊或者半自动焊,手工焊难以控制焊缝成形质量,易造成焊缝中有穿孔的现象,因此需要进行大量补焊工作,效率较低;半自动焊接无法实现有效焊缝跟踪调整,导致波纹板不同坡段焊缝成形质量有明显差异,难以满足焊接质量一致性要求。而现有的少数机器人自动化焊接案例中,激光跟踪传感器均固定于机器人焊枪上,导致在焊缝跟踪时焊枪无法改变姿态,无法应用于波纹板焊接。并且,集装箱波纹板焊接作业环境恶劣,噪音大,灰尘多,严重危害作业人员的身体健康。
技术实现要素:
3.本实用新型的目的在于提供一种可以有效保证焊缝成形质量及其稳定性,而且大幅提高焊接效率,实现焊接自动化的波纹板的机器人自动化高速焊接装置。
4.本实用新型的技术解决方案是:
5.一种波纹板的机器人自动化高速焊接装置,其特征是:包括设置于集装箱流水生产线两侧的多台焊接机器人,机器人与集装箱之间单独设置工作台,工作台上、机器人水平移动方向上安装直线导轨,直线导轨上装有激光焊缝跟踪传感器;焊接时,激光传感器优先于机器人运动开始扫描波纹板焊缝,在焊接过程中动态生成焊缝轨迹并传送给机器人控制器,机器人动态执行焊接作业,边扫描边焊接,直至完成该工位的焊接任务。
6.机器人焊枪上配有防碰撞装置,当焊枪发生轻微意外碰撞时,保护机器人及碰撞物不受损坏。
7.装有激光焊缝跟踪传感器的直线导轨由单台电机驱动。
8.装有激光焊缝跟踪传感器的直线导轨长度范围为0.3米~3米,直线导轨安装在一条固定于所述工作台上的工字钢上,可以防止较长的导轨发生扭曲变形,确保传感器运行路径为水平直线。
9.激光焊缝跟踪传感器的外壳加装有防护罩,可以有效避免传感器收到弧光、飞溅、粉尘的干扰。
10.本实用新型的优点主要有:
11.一、独立安装的激光焊缝识别系统,可实现激光传感器与机器人的分离独立运动,有效解决了激光器装在机焊枪部位导致焊枪无法改变姿态的关键难题,并且在焊接过程中动态生成焊缝轨迹,实现了集装箱波纹板的自动化焊接,同时保证了焊接精度和焊缝成形
质量。
12.二、可将焊接速度由人工焊的1米/分钟提升到1.5~2.5米/分钟,并且一次成形无需补焊,大幅提高了焊接效率。
13.三、采用多台焊接机器人协同作业,实现了多种箱型的集装箱全自动无人化焊接操作,降低了集装箱的生产成本和工人的劳动强度。
附图说明
14.下面结合附图和实施例对本实用新型作进一步说明。
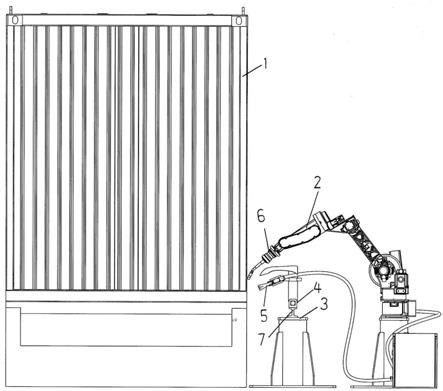
15.图1是本实用新型一个实施例的结构示意图。
具体实施方式
16.一种波纹板的机器人自动化高速焊接装置,包括设置于集装箱1流水生产线两侧的多台焊接机器人2,机器人与集装箱之间单独设置工作台3,工作台上、机器人水平移动方向上安装直线导轨4,直线导轨上装有激光焊缝跟踪传感器5;焊接时,激光传感器优先于机器人运动开始扫描波纹板焊缝,在焊接过程中动态生成焊缝轨迹并传送给机器人控制器,机器人动态执行焊接作业,边扫描边焊接,直至完成该工位的焊接任务。
17.机器人焊枪上可选配有防碰撞装置6,当焊枪发生轻微意外碰撞时,焊接机器人会立即停止运动,保护机器人及碰撞物不受损坏。
18.装有激光焊缝跟踪传感器的直线导轨由单台电机驱动,作为六轴焊接机器人的外部拓展轴第七轴,因而该机器人需具备至少七轴联动功能。
19.装有激光焊缝跟踪传感器的直线导轨长度范围为0.3米~3米,直线导轨安装在一条固定于所述工作台上的工字钢7上,可以防止较长的导轨发生扭曲变形,确保传感器运行路径为水平直线。
20.激光焊缝跟踪传感器的外壳加装有防护罩,可以有效避免传感器收到弧光、飞溅、粉尘的干扰。
技术特征:
1.一种波纹板的机器人自动化高速焊接装置,其特征是:包括设置于集装箱流水生产线两侧的多台焊接机器人,机器人与集装箱之间单独设置工作台,工作台上、机器人水平移动方向上安装直线导轨,直线导轨上装有激光焊缝跟踪传感器。2.根据权利要求1所述的波纹板的机器人自动化高速焊接装置,其特征是:机器人焊枪上配有防碰撞装置。3.根据权利要求1所述的波纹板的机器人自动化高速焊接装置,其特征是:装有激光焊缝跟踪传感器的直线导轨由单台电机驱动。4.根据权利要求1所述的波纹板的机器人自动化高速焊接装置,其特征是:装有激光焊缝跟踪传感器的直线导轨长度范围为0.3米~3米,直线导轨安装在一条固定于所述工作台上的工字钢上。5.根据权利要求1所述的波纹板的机器人自动化高速焊接装置,其特征是:激光焊缝跟踪传感器的外壳加装有防护罩。
技术总结
本实用新型公开了一种波纹板的机器人自动化高速焊接装置,包括设置于集装箱流水生产线两侧的多台焊接机器人,机器人与集装箱之间单独设置工作台,工作台上、机器人水平移动方向上安装直线导轨,直线导轨上装有激光焊缝跟踪传感器。本实用新型可以有效保证焊缝成形质量及其稳定性,而且大幅提高焊接效率,实现焊接自动化。接自动化。接自动化。
技术研发人员:顾京君 周鹏 张健 刘宗礼 童彤 李家顺 周飞翔
受保护的技术使用者:南通振康机械有限公司
技术研发日:2021.02.08
技术公布日:2021/10/23
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1