一种机器人焊接站用变位机的制作方法
1.本实用新型属于焊接变位机技术领域,具体涉及一种机器人焊接站用变位机。
背景技术:
2.机器人焊接站是一种用于机械工程的智能工作站,通过机器人进行智能焊接,在机器人焊接站中,通常会用到焊机变位机,焊接变位机是一种用来拖动待焊工件,使待焊工件焊缝运动至理想位置进行施焊的设备。
3.座式变位机是焊接变位机的其中一种,通常适用于轴类、盘类、筒体等回转工件的焊接,其主要包括机架、圆形回转平台、回转机构、翻转机构和若干夹紧机构,回转机构用于带动圆形回转平台转动,翻转机构用于带动圆形回转平台翻转,从而将待焊接的回转件运动至不同的位置进行焊接,通常在焊接前,人们在圆形回转平台上多个方向分别安装夹紧机构,通过各个方向上的夹紧机构将回转件夹紧固定,这样的夹紧方式需要人们分多次调节各个夹紧机构进行夹紧,同时由于各个夹紧机构向回转件伸出夹紧的过程是分开不同步的,因此,在夹紧回转件时,还需要对各个夹紧机构的伸出量进行微调,使人们在夹紧回转件时需要耗费大量的时间。
技术实现要素:
4.本实用新型的目的是:旨在提供一种机器人焊接站用变位机,以解决现有的座式变位机在使用夹紧机构夹紧回转件时,不仅需要人们分多次调节各个夹紧机构进行夹紧,而且由于各个夹紧机构向回转件伸出夹紧的过程是分开不同步的,还需要对各个夹紧机构的伸出量进行微调,使人们在夹紧回转件时需要耗费大量的时间的问题。
5.为实现上述技术目的,本实用新型采用的技术方案如下:
6.一种机器人焊接站用变位机,包括机架、回转机构和翻转机构,所述回转机构包括有机箱、第一伺服电机以及圆形回转平台,所述翻转机构包括有第二伺服电机、半圆齿盘、齿轮和设置于机架的转轴,所述圆形回转平台上表面设有若干圆周阵列分布的t形滑槽,各个所述t形滑槽均由圆形回转平台的边缘向圆心延伸,各个所述t形滑槽均滑动连接有t形滑块,所述t形滑块上端设有圆杆,所述圆形回转平台上方还设有转台,所述转台中部设有通槽,所述转台侧面转动连接有若干第一安装块,所述圆形回转平台固定连接有若干第二安装块,所述第一安装块与第二安装块之间通过螺栓连接,所述转台上表面设有若干与t形滑槽位置相对应的条形槽,各个所述条形槽均由圆形回转平台的边缘向圆心延伸,所述条形槽与其所对应的t形滑槽之间形成锐角夹角,所述圆杆上端贯穿条形槽螺栓连接有夹紧块,所述夹紧块向着圆形回转平台圆心延伸,其中一个所述第一安装块与转台之间设有转动定位组件。
7.人们先通过螺栓将转台的第一安装块和圆形回转平台的第二安装块安装固定,然后人们即可将待焊接的回转件穿过通槽放置于圆形回转平台上,此时,人们即可推动转台相对于第一安装块和圆形回转平台转动,通过条形槽的导向,能够使圆杆带动t形滑块在t
形滑槽中,从圆形回转平台边缘向着圆心滑动靠拢,从而将夹紧块向着通槽汇聚靠拢,直至夹紧块夹紧回转件后,人们即可使用转动定位组件,将第一安装块与转台之间固定,避免转台转动使夹紧块松动,由于第一安装块与圆形回转平台之间固定,同时第一安装块与转台之间固定,因此第一安装块、转台以及圆形回转平台之间固定为一个整体,通过回转机构即可带动待焊接的回转件发生转动,通过翻转机构即可带动待焊接的回转件发生翻转。
8.所述机架设有安装座,所述机架设置于安装座两侧,所述安装座底部边角处均设有装配槽,各个所述装配槽均装配有弹簧,所述弹簧共同固定连接有减震底座。通过在安装座下侧设置弹簧和减震底座,能够减缓第一伺服电机和第二伺服电机在工作过程中产生的晃动,从而使回转件在圆形回转平台中更加稳定。
9.所述减震底座还设有若干分别套设于各个弹簧内侧的定位杆,所述安装座设有与定位杆相匹配的定位通孔,所述定位杆上端设有限位块。定位杆和定位通孔能够将减震底座与安装座之间定位,避免减震底座与安装座之间位置偏移,同时限位块能够避免定位杆往下运动脱离定位通孔。
10.所述第一安装块设有t形转块,所述转台侧面设有与t形转块相匹配的t形环槽。转台与第一安装块的转动连接结构简单,加工方便,第一安装块通过t形转块能够在转台侧面的t形环槽中转动。
11.所述转动定位组件包括有设置于第一安装块的安装板、若干设置于转台的定位孔以及一个设置于转台的转柄,所述安装板装配有与定位孔相匹配的蝶形螺栓。人们操作转柄转动转台,通过条形槽的导向,使圆杆带动t形滑块和夹紧块向圆形回转平台的圆心运动,将回转件卡紧,此时,人们即可通过蝶形螺栓将安装板与相应的定位孔之间定位,从而使转台和第一安装块之间得到固定,将回转件夹紧,避免松动。
12.所述条形槽与其所对应的t形滑槽之间夹角大小为30
°‑
50
°
的任意值。
13.所述夹紧块端部设有若干橡胶凸块,所述橡胶凸块竖向设置。橡胶凸块的摩擦系数较大,能够增大夹紧块与回转件之间的摩擦力,提升夹紧效果。
14.通过推动转台即可将各个夹紧块同步向圆形回转平台的圆心处聚拢,从而将待焊接的回转件夹紧固定,避免人们需要分多次调节各个夹紧机构进行夹紧的繁琐,同时各个夹紧块向圆形回转平台的圆心处聚拢运动是同步的,因此也无需人们对各个夹紧机构的伸出量进行微调,节约了时间;设置减震底座和弹簧,能够有效地减缓第一伺服电机和第二伺服电机在工作过程中产生的晃动,从而使回转件在圆形回转平台中更加稳定。
附图说明
15.本实用新型可以通过附图给出的非限定性实施例进一步说明;
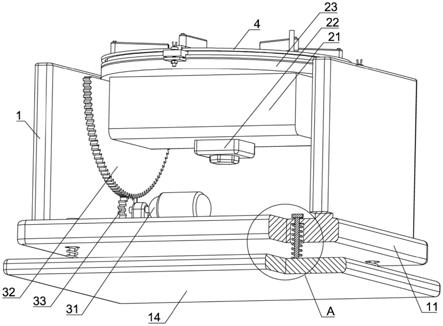
16.图1为本实用新型一种机器人焊接站用变位机实施例的局部剖面结构示意图;
17.图2为图1的a处结构放大示意图;
18.图3为本实用新型一种机器人焊接站用变位机实施例的上视结构示意图;
19.图4为图3的b处结构放大示意图;
20.图5为本实用新型一种机器人焊接站用变位机实施例的转台结构示意图;
21.图6为本实用新型一种机器人焊接站用变位机实施例的圆形回转平台结构示意图;
22.主要元件符号说明如下:
23.机架1、安装座11、装配槽12、弹簧13、减震底座14、定位杆141、限位块142、机箱21、第一伺服电机22、圆形回转平台23、t形滑槽231、t形滑块24、圆杆241、第二伺服电机31、半圆齿盘32、齿轮33、转轴34、转台4、通槽41、第一安装块42、t形转块421、第二安装块43、条形槽44、夹紧块45、橡胶凸块451、t形环槽46、安装板51、蝶形螺栓511、定位孔52、转柄53。
具体实施方式
24.为了使本领域的技术人员可以更好地理解本实用新型,下面结合附图和实施例对本实用新型技术方案进一步说明。
25.如图1
‑
图6所示,本实用新型的一种机器人焊接站用变位机,包括机架1、回转机构和翻转机构,回转机构包括有机箱21、第一伺服电机22以及圆形回转平台23,第一伺服电机22设置于机箱21中且第一伺服电机22的输出轴与圆形回转平台23固定连接,从而通过第一伺服电机22的输出轴转动能够带动圆形回转平台23转动;翻转机构包括有第二伺服电机31、半圆齿盘32、齿轮33和设置于机架1的转轴34,半圆齿盘23设置于机箱21一侧,第二伺服电机31的输出轴与齿轮33固定连接,齿轮33与半圆齿盘23相啮合,第二伺服电机31的输出轴正反转动时,通过齿轮33与半圆齿盘23的传动,从而使圆形回转平台23发生顺时针以及逆时针偏转;
26.圆形回转平台23上表面设有若干圆周阵列分布的t形滑槽231,各个t形滑槽231均由圆形回转平台23的边缘向圆心延伸,各个t形滑槽231均滑动连接有t形滑块24,t形滑块24上端设有圆杆241,t形滑块24能够在t形滑槽231中,使圆杆241从圆形回转平台23边缘向着圆心滑动靠拢;圆形回转平台23上方还设有转台4,转台4中部设有通槽41,回转件能够穿过通槽41放置于圆形回转平台23上;转台4侧面转动连接有若干第一安装块42,圆形回转平台23固定连接有若干第二安装块43,第一安装块42与第二安装块43之间通过螺栓连接,第一安装块42和第二安装块43之间通过螺栓方便固定,从而使转台4能够相对于圆形回转平台23发生转动;转台4上表面设有若干与t形滑槽231位置相对应的条形槽44,各个条形槽44均由圆形回转平台23的边缘向圆心延伸,条形槽44与其所对应的t形滑槽231之间形成锐角夹角,圆杆241上端贯穿条形槽44螺栓连接有夹紧块45,夹紧块45向着圆形回转平台23圆心延伸,当转台4转动时,由于条形槽44与其所对应的t形滑槽231之间呈锐角夹角,因此通过条形槽44的导向,能够使各个圆杆241同步向着圆心滑动靠拢,从而将夹紧块45同步向着通槽41汇聚靠拢,进而夹紧回转件,其中一个第一安装块43与转台4之间设有转动定位组件,通过转动定位组件,即可将第一安装块43与转台4之间固定,避免转台4转动使夹紧块45松动。
27.人们先通过螺栓将转台4的第一安装块42和圆形回转平台23的第二安装块43安装固定,同时将各个圆杆241分别贯穿各个条形槽44,然后人们将夹紧块45与各个圆杆241螺栓固定,再将待焊接的回转件穿过通槽41放置于圆形回转平台23上,此时,人们即可推动转台4相对于第一安装块42和圆形回转平台23转动,通过条形槽44的导向,能够使圆杆241带动t形滑块24在t形滑槽231中,从圆形回转平台23边缘同步向着圆心滑动靠拢,从而将夹紧块45同步向着通槽41汇聚靠拢,直至夹紧块45夹紧回转件后,人们即可使用转动定位组件,将第一安装块43与转台4之间固定,避免转台4转动使夹紧块45松动,由于第一安装块43与
圆形回转平台23之间固定,同时第一安装块43与转台4之间固定,因此第一安装块43、转台4以及圆形回转平台23之间固定为一个整体,通过回转机构即可带动待焊接的回转件发生转动,通过翻转机构即可带动待焊接的回转件发生翻转。
28.机架1设有安装座11,机架1设置于安装座11两侧,安装座11底部边角处均设有装配槽12,各个装配槽12均装配有弹簧13,弹簧13共同固定连接有减震底座14。通过在安装座11下侧设置弹簧13和减震底座14,能够减缓第一伺服电机22和第二伺服电机31在工作过程中产生的晃动,从而使回转件在圆形回转平台23中更加稳定。实际上,也可根据情况考虑使用其他的减震措施,使回转件在圆形回转平台23中更加稳定。
29.减震底座14还设有若干分别套设于各个弹簧13内侧的定位杆141,安装座11设有与定位杆141相匹配的定位通孔,定位杆141上端设有限位块142。定位杆141和定位通孔能够将减震底座14与安装座11之间定位,避免减震底座14与安装座11之间位置偏移,同时限位块142能够避免定位杆141往下运动脱离定位通孔。实际上,也可根据情况考虑使用其他结构,能够将减震底座14与安装座11之间定位。
30.第一安装块42设有t形转块421,转台4侧面设有与t形转块421相匹配的t形环槽46。转台4与第一安装块42的转动连接结构简单,加工方便,第一安装块42通过t形转块421能够在转台4侧面的t形环槽46中转动。实际上,也可根据情况考虑在转台4与第一安装块42之间使用其他结构简单的转动连接方式。
31.转动定位组件包括有设置于第一安装块43的安装板51、若干设置于转台4的定位孔52以及一个设置于转台4的转柄53,安装板51装配有与定位孔52相匹配的蝶形螺栓511。人们操作转柄53转动转台4,通过条形槽44的导向,使圆杆241带动t形滑块24和夹紧块45向圆形回转平台23的圆心运动,将回转件卡紧,此时,人们即可通过蝶形螺栓511将安装板51与相应的定位孔52之间定位,从而使转台4和第一安装块43之间得到固定,将回转件夹紧,避免松动。实际上,也可根据情况考虑使用其他结构,使转台4和第一安装块43之间得到固定,将回转件夹紧,避免松动。
32.条形槽44与其所对应的t形滑槽231之间夹角大小为30
°‑
50
°
的任意值。
33.夹紧块45端部设有若干橡胶凸块451,橡胶凸块451竖向设置。橡胶凸块451的摩擦系数较大,能够增大夹紧块45与回转件之间的摩擦力,提升夹紧效果。实际上,也可根据情况考虑使用其他结构,能够提升夹紧块45夹紧回转件的效果。
34.本实用新型解决了现有的座式变位机在使用夹紧机构夹紧回转件时,不仅需要人们分多次调节各个夹紧机构进行夹紧,而且由于各个夹紧机构向回转件伸出夹紧的过程是分开不同步的,还需要对各个夹紧机构的伸出量进行微调,使人们在夹紧回转件时需要耗费大量的时间的问题。
35.上述实施例仅示例性说明本实用新型的原理及其功效,而非用于限制本实用新型。任何熟悉此技术的人士皆可在不违背本实用新型的精神及范畴下,对上述实施例进行修饰或改变。因此,凡所属技术领域中具有通常知识者在未脱离本实用新型所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本实用新型的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1