电动铆合装置及电动铆合机的制作方法
1.本实用新型涉及铆合设备,具体涉及一种电动铆合装置,还涉及一种电动铆合机。
背景技术:
2.铆合机是一种用于两个金属零件进行自动铆合的设备,其通常包括机架及设置于机架的传输装置、零件一上料装置、零件二上料装置和铆合装置,传输装置接收零件一后将零件一传输至零件二上料装置,零件二上料装置将零件二放置于零件一上,传输装置在将零件一及零件二传输至铆合装置进行铆合,传输装置最后将铆合后的成品传输至成品收集处。
3.其中,铆合装置包括固定杆、活动顶杆及顶升机构,固定杆位于上方,活动顶杆位于下方,顶升机构驱动活动顶杆上升并靠近固定杆,挤压零件一和零件二完成铆合工序。顶升机构一般选择油缸或气缸,油缸或气缸驱动活动顶杆上升过程中,每次上升到位后高度均不一致,导致各组零件二和零件一铆合时的形变程度不同,导致成品质量不一。
技术实现要素:
4.针对现有技术存在的不足,本实用新型的目的在于提供一种保证成品质量的电动铆合装置。
5.为实现上述目的,本实用新型提供了如下技术方案:包括机架及设置于机架的固定杆、活动顶杆和顶升机构,所述的固定杆位于活动顶杆正上方,所述的顶升机构驱动活动顶杆升降,其特征在于:所述的顶升机构包括电机、驱动轮及顶升座,所述的驱动轮在电机驱动下旋转并偏心设置有偏心轴,所述的偏心轴外周套设有偏心轮,所述的顶升座沿竖向滑移于机架并设置有容纳偏心块的联动腔,所述的联动腔的高度与偏心轮一致,所述的联动腔的宽度大于偏心轮,形成供偏心轮相对联动腔横向移动的活动空间,所述的活动顶杆安装于顶升座并与顶升座同步升降。
6.通过采用上述技术方案,由电机驱动的偏心轮会带动顶升座进行升降,由于偏心轮每次上升的最高高度均为同一高度,故安装活动顶杆的顶升座每次上升的最高高度保持一致,从而使零件一和零件二所受到的压力及形变一致,从而保证铆合后的成品质量。
7.本实用新型进一步设置为:所述的偏心轮与偏心轴呈转动配合,所述的偏心轮的上下两侧分别设置有与联动腔腔壁贴合的联动平面。
8.通过采用上述技术方案,增设联动平面,提高偏心轮与联动腔的联动稳定性。
9.本实用新型进一步设置为:所述的机架沿竖向设置有升降滑槽,所述的活动顶杆下方设置有滑移于升降滑槽的上联动块,所述的顶升座上方设置有滑移于升降滑槽的下联动块,所述的上联动块下方与下联动块上方分别设置有构成两者同步移动的燕尾槽及燕尾块,所述的升降滑槽的槽口设置有将上联动块和下联动块限位于升降滑槽内的限位板。
10.通过采用上述技术方案,升降滑槽使活动顶杆的升降更为稳定、准确,上联动块配合下联动块构成活动顶杆与顶升座的升降联动配合,同时,增设限位板,保证上联动块与下
联动块的联动配合能够稳定保持。
11.本实用新型进一步设置为:所述的顶升座与下联动块之间设置有调节块,所述的调节块上方沿纵向设置有上t形槽,下方沿横向设置有下t形槽,所述的下联动块设置有沿上t形槽移动的上t形块,所述的顶升座设置有延伸至下t形槽内且端部为下t形块的调节柱。
12.通过采用上述技术方案,两组t形槽与t形块配合,形成顶升座下联动块相对顶升座的纵向及横向的相对位置调节,使下联动块与上联动块的配合更为精准、稳定。
13.本实用新型进一步设置为:所述的顶升座两侧分别沿竖向设置有导向孔,所述的机架固定设置有分别穿过各导向孔的导向杆。
14.通过采用上述技术方案,机架上的导向杆穿过顶升座的导向孔,提高顶升座的升降稳定性。
15.本实用新型还提供一种采用电动铆合装置的电动铆合机,并提供了如下技术方案:所述的机架设置有传输装置、第一上料装置及第二上料装置,传输装置接收零件一后将零件一传输至第二上料装置,第二上料装置将零件二放置于零件一上,传输装置在将零件一及零件二传输至铆合装置进行铆合,传输装置最后将铆合后的成品传输至成品收集处。
16.通过采用上述技术方案,传输装置、第一上料装置及第二上料装置相配合实现零件一和零件二的自动铆合,并在铆合之后逐个出料,提高加工效率。
17.本实用新型进一步设置为:所述的传输装置包括移位轨道、多个移位爪及移位机构,所述的移位轨道具有多个停留位置,依次为与第一上料装置对应的零件一上料位、与第二上料装置对应的零件二上料位、与铆合装置对应的铆合位置及出料位置,所述的移位机构驱动移位爪在相邻停留位置之间往复移动,所述的位移抓呈倾斜设置并随着靠近移位轨道高度逐渐降低。
18.通过采用上述技术方案,单一移位机构驱动多个移位爪同步移动,实现各个停留位置之间零件的转移,动作更为同步,结构更为精简,此外,由于零件二一般为小型的薄片构件,传统平置的移位抓难以稳定推送零件,故调整移位爪的安装角度至倾斜状,从而提高与零件侧面的接触面积,提高推送稳定性。
19.本实用新型进一步设置为:所述的移位机构包括基座、基座轨道、基座气缸及爪体气缸,所述的基座轨道与移位轨道平行设置,所述的基座气缸驱动基座往复滑移于基座轨道,所述的基座上端面作为倾斜安装爪体气缸的安装面,所述的爪体气缸与移位爪一一对应并驱动移位爪靠近或远离基座轨道。
20.通过采用上述技术方案,由基座统一带动各组爪体气缸和位移爪移动,使动作更为同步,结构更为精简。
21.本实用新型进一步设置为:所述的第一上料装置包括第一上料轨道、第一振动盘、第一直振、侧推块及侧推气缸,所述的第一上料轨道与移位轨道平行设置,一端作为第一进料端并与第一振动盘连接,另一端作为第一出料端并与移位轨道的零件一上料位相重合,所述的第一直振位于第一上料轨道下方并驱动零件一从第一进料端向第一出料端移动,所述的侧推块在侧推气缸的驱动下,将位于第一上料轨道的零件一推送至零件一上料位。
22.通过采用上述技术方案,第一振动盘排列的零件一逐个沿第一上料轨道移动,直至达到第一出料端,由侧推块推动至移位轨道实现自动逐个上料功能,使移位爪与零件一
能够准确一一对应。
23.本实用新型进一步设置为:所述的第二上料装置包括第二上料轨道包括第二上料轨道、第二振动盘、第二直振、吸附件及吸附位移机构,所述的第二上料轨道一端作为第二进料端并与第二振动盘连接,另一端作为第二出料端并延伸至与零件二上料位相近的位置,所述的吸附位移机构驱动吸附件,将位于第二出料端的零件二转移至位于零件二上料位的零件一上。
24.通过采用上述技术方案,第二振动盘排列的零件二逐个沿第二上料轨道移动,直至达到第二出料端,由吸附件转移至移位轨道实现自动逐个上料功能,同时还能完成零件二与零件一的自动堆叠。
25.本实用新型进一步设置为:所述的机架位于出料位置设置有与出料位置衔接的出料坡道和位于出料位置上方的检测传感器,所述的机架设置有驱动出料坡道侧移的侧移气缸,使出料坡道具有与移位轨道相对的合格品传输位置和与移位轨道相错的不合格品传输位置。
26.通过采用上述技术方案,根据检测传感器的检测结果,出料坡道将合格盘引导至成品收集处,而不合格品则会落于出料坡道正下方的不合格品收集处,出料的同时完成分拣。
附图说明
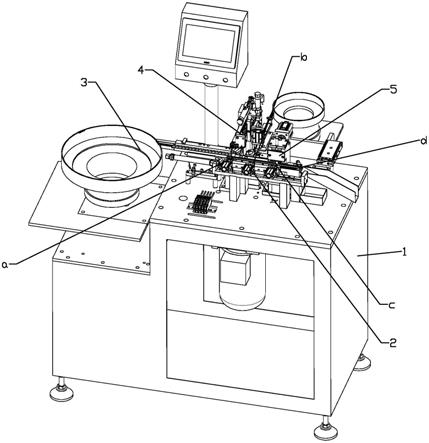
27.图1为本实用新型具体实施方式的立体图;
28.图2为本实用新型具体实施方式中铆合装置的立体图;
29.图3为实用新型具体实施方式中电机和偏心轮的配合立体图;
30.图4为实用新型具体实施方式中偏心轮和提升座的配合立体图;
31.图5为实用新型具体实施方式中传输装置的立体图;
32.图6为实用新型具体实施方式中第一上料装置的立体图;
33.图7为实用新型具体实施方式中第二上料装置的立体图;
34.图8为实用新型具体实施方式中出料坡道的立体图。
具体实施方式
[0035] 下面将结合附图对本发明的技术方案进行清楚、完整地描述, 显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。 基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0036]
在本发明的描述中,需要说明的是,术语“中心”、“上
”ꢀ
、“下
”ꢀ
、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系, 仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语
ꢀ“
第一”、“第二”、“第三
”ꢀ
仅用于描述目的,而不能理解为指示或暗示相对重要性。
[0037]
如图1所示,本实用新型公开了一种电动铆合机,包括机架1及设置于机架1的传输装置2、第一上料装置3、第二上料装置4及铆合装置5,传输装置2接收零件一后将零件一传
输至第二上料装置4,第二上料装置4将零件二放置于零件一上,传输装置2在将零件一及零件二传输至铆合装置5进行铆合,传输装置2最后将铆合后的成品传输至成品收集处。传输装置2、第一上料装置3、第二上料装置4及铆合装置5相配合实现零件一和零件二的自动铆合,并在铆合之后逐个出料,提高加工效率。
[0038]
如图2至4所示,铆合装置5包括固定杆51、活动顶杆52和顶升机构,固定杆51位于活动顶杆52正上方,顶升机构驱动活动顶杆52升降,顶升机构包括电机53、驱动轮56及顶升座55,驱动轮56在电机53驱动下旋转并偏心设置有偏心轴561,偏心轴561外周套设有偏心轮54,顶升座55沿竖向滑移于机架1并设置有容纳偏心轮54的联动腔551,联动腔551的高度与偏心轮54一致,联动腔551的宽度大于偏心轮54,形成供偏心轮54相对联动腔551横向移动的活动空间552,活动顶杆52安装于顶升座55并与顶升座55同步升降,电机53为提高扭矩,一般与减速器531配合工作。
[0039]
偏心轮54与偏心轴561呈转动配合,偏心轮54的上下两侧分别设置有与联动腔551腔壁贴合的联动平面541,增设联动平面541,提高偏心轮54与联动腔551的联动稳定性。
[0040]
机架1沿竖向设置有升降滑槽11,活动顶杆52下方设置有滑移于升降滑槽11的上联动块521,顶升座55上方设置有滑移于升降滑槽11的下联动块551,上联动块521下方与下联动块551上方分别设置有构成两者同步移动的燕尾槽522及燕尾块552,升降滑槽11的槽口设置有将上联动块521和下联动块551限位于升降滑槽11内的限位板111,升降滑槽11使活动顶杆52的升降更为稳定、准确,上联动块521配合下联动块551构成活动顶杆52与顶升座55的升降联动配合,同时,增设限位板111,保证上联动块521与下联动块551的联动配合能够稳定保持。
[0041]
顶升座55与下联动块551之间设置有调节块554,调节块554上方沿纵向设置有上t形槽5541,下方沿横向设置有下t形槽5542,下联动块551设置有沿上t形槽5541移动的上t形块5511,顶升座55设置有延伸至下t形槽5542内且端部为下t形块5551的调节柱555,两组t形槽与t形块配合,形成顶升座下联动块相对顶升座的纵向及横向的相对位置调节,使下联动块与上联动块的配合更为精准、稳定。
[0042]
顶升座55两侧分别沿竖向设置有导向孔553,机架1固定设置有分别穿过各导向孔553的导向杆12,机架1上的导向杆12穿过顶升座55的导向孔553,提高顶升座55的升降稳定性。、
[0043]
如图5所示,传输装置2包括移位轨道21、多个移位爪22及移位机构,移位轨道21具有多个停留位置,依次为与第一上料装置3对应的零件一上料位a、与第二上料装置4对应的零件二上料位b、与铆合装置5对应的铆合位置c及出料位置d,移位机构驱动移位爪22在相邻停留位置之间往复移动,位移抓呈倾斜设置并随着靠近移位轨道21高度逐渐降低,单一移位机构驱动多个移位爪22同步移动,实现各个停留位置之间零件的转移,动作更为同步,结构更为精简,此外,由于零件二一般为小型的薄片构件,传统平置的移位抓难以稳定推送零件,故调整移位爪22的安装角度至倾斜状,从而提高与零件侧面的接触面积,提高推送稳定性。
[0044]
移位机构包括基座23、基座轨道13、基座气缸131及爪体气缸231,基座轨道13与移位轨道21平行设置,基座气缸131驱动基座23往复滑移于基座轨道13,基座23上端面作为倾斜安装爪体气缸231的安装面232,爪体气缸231与移位爪22一一对应并驱动移位爪22靠近
或远离基座轨道13,由基座23统一带动各组爪体气缸231和移位爪22移动,使动作更为同步,结构更为精简,还可将基座轨道13倾斜固定实现移位爪22的倾斜安装。
[0045]
如图6所示,第一上料装置3包括第一上料轨道31、第一振动盘32、第一直振33、侧推块34及侧推气缸35,第一上料轨道31与移位轨道21平行设置,一端作为第一进料端311并与第一振动盘32连接,另一端作为第一出料端312并与移位轨道21的零件一上料位相重合,第一直振33位于第一上料轨道31下方并驱动零件一从第一进料端311向第一出料端312移动,侧推块34在侧推气缸35的驱动下,将位于第一上料轨道31的零件一推送至零件一上料位,第一振动盘32排列的零件一逐个沿第一上料轨道31移动,直至达到第一出料端312,由侧推块34推动至移位轨道21实现自动逐个上料功能,使移位爪22与零件一能够准确一一对应。
[0046]
如图7所示,第二上料装置4包括第二上料轨道包括第二上料轨道41、第二振动盘42、第二直振43、吸附件44及吸附位移机构45,第二上料轨道41一端作为第二进料端411并与第二振动盘42连接,另一端作为第二出料端412并延伸至与零件二上料位相近的位置,吸附位移机构45驱动吸附件44,将位于第二出料端的零件二转移至位于零件二上料位的零件一上,第二振动盘42排列的零件二逐个沿第二上料轨道41移动,直至达到第二出料端,由吸附件44转移至移位轨道21实现自动逐个上料功能,同时还能完成零件二与零件一的自动堆叠,此外,吸附位移机构45为现有的xyz轴位移机构,吸附件44可通过磁力或气体负压实现,第二上料轨道41的第二出料端412设置有接收零件二并使零件二错位的错位座46,错位座46由错位气缸461驱动,便于吸附件44逐个吸附。
[0047]
如图8所示,机架1位于出料位置设置有与出料位置衔接的出料坡道14和位于出料位置上方的检测传感器15,机架1设置有驱动出料坡道14侧移的侧移气缸141,使出料坡道14具有与移位轨道21相对的合格品传输位置和与移位轨道21相错的不合格品传输位置,根据检测传感器15的检测结果,出料坡道14将合格盘引导至成品收集处(一般为成品框或传输带),而不合格品则会落于出料坡道14正下方的不合格品收集处(即图中的收集盒142),出料的同时完成分拣。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1