双工位激光加工设备的制作方法
1.本实用新型涉及激光加工技术领域,尤其是涉及一种双工位激光加工设备。
背景技术:
2.激光加工设备已经广泛的应用于工业生产中,在激光加工设备工作过程中需要获取加工物件的厚度值,以保证激光的焦距作用在物件的表面(或想要放置的位置)。
3.一般激光加工时,为了提高激光加工的效率和提高激光器的利用率会采用多工位加工,为了确保加工的一致性,需要保证不同的载物台高度一致。传统的做法,是人工检测两个台面的高度,但是人工操作工作效率低,且不利于设备朝着自动化与智能化的趋势发展。
技术实现要素:
4.基于此,有必要提供一种可以解决上述技术问题的双工位激光加工设备。
5.一种双工位双工位激光加工设备,包括主架、第一激光加工设备、第二激光加工设备、控制模块和报警模块,所述第一激光加工设备和所述第二激光加工设备均与所述控制模块连接,所述控制模块与所述报警模块连接;
6.所述第一激光加工设备包括安装在所述主架上的第一z轴动力组件、与所述第一z轴动力组件连接的第一承载组件、与所述第一承载组件连接的第一测量组件、用于放置第一待测物的第一载物台以及用于驱动所述第一载物台沿水平方向运动的第一水平动力组件;所述第一z轴动力组件用于驱动所述第一承载组件沿竖直方向运动,从而带动所述第一测量组件一起运动;所述第一承载组件和所述第一测量组件均设置在所述第一载物台的上方,且所述第一承载组件用于承载第一激光组件;
7.所述第一测量组件用于接触到所述第一载物台时获得所述第一载物台的高度,并且将所述第一载物台的高度发送给所述控制模块;
8.所述第二激光加工设备包括安装在所述主架上的第二z轴动力组件、与所述第二z轴动力组件连接的第二承载组件、与所述第二承载组件连接的第二测量组件、用于放置第二待测物的第二载物台以及用于驱动所述第二载物台沿水平方向运动的第二水平动力组件;所述第二z轴动力组件用于驱动所述第二承载组件沿竖直方向运动,从而带动所述第二测量组件一起运动;所述第二承载组件和所述第二测量组件均设置在所述第二载物台的上方,且所述第二承载组件用于承载第二激光组件;
9.所述第二测量组件用于接触到所述第二载物台时获得所述第二载物台的高度,并且将所述第二载物台的高度发送给所述控制模块;
10.所述控制模块用于比较所述第一载物台的高度和所述第二载物台的高度,并且用于在所述第一载物台的高度和所述第二载物台的高度差超过预设值时,控制所述报警模块报警。
11.这种双工位激光加工设备通过第一测量组件获得第一载物台的高度,通过第二测
量组件获得第二载物台的高度,当第一载物台的高度和第二载物台的高度之差超过预设值时,控制模块控制报警模块报警。
12.相对于传统的做法,这种双工位激光加工设备可以自动测量第一载物台的高度和第二载物台的高度,减少了耗时的同时,提高了加工效率,且利于设备朝着自动化与智能化的趋势发展。
附图说明
13.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
14.其中:
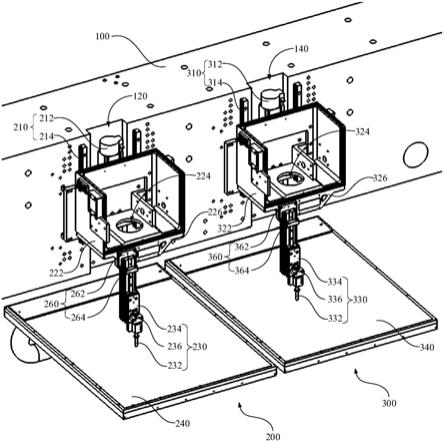
15.图1为一实施方式的双工位激光加工设备的一方向的结构示意图。
16.图2为如图1所示的双工位激光加工设备的另一方向的结构示意图。
具体实施方式
17.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
18.如图1和图2所示的一实施方式的双工位激光加工设备,包括主架100、第一激光加工设备200、第二激光加工设备300、控制模块(图中未显示)和报警模块(图中未显示),第一激光加工设备200和第二激光加工设备300均与控制模块连接,控制模块与报警模块连接。
19.第一激光加工设备200包括安装在主架100上的第一z轴动力组件210、与第一z轴动力组件210连接的第一承载组件、与第一承载组件连接的第一测量组件230、用于放置第一待测物的第一载物台240以及用于驱动第一载物台240沿水平方向运动的第一水平动力组件(图中未显示)。
20.第一z轴动力组件210用于驱动第一承载组件沿竖直方向运动,从而带动第一测量组件230一起运动。第一承载组件和第一测量组件230均设置在第一载物台240的上方,且第一承载组件用于承载第一激光组件(图中未显示)。
21.第一测量组件230用于接触到第一载物台240时获得第一载物台240的高度,并且将第一载物台240的高度发送给控制模块。
22.第二激光加工设备300包括安装在主架100上的第二z轴动力组件310、与第二z轴动力组件310连接的第二承载组件、与第二承载组件连接的第二测量组件330、用于放置第二待测物的第二载物台340以及用于驱动第二载物台340沿水平方向运动的第二水平动力组件(图中未显示)。
23.第二z轴动力组件310用于驱动第二承载组件沿竖直方向运动,从而带动第二测量组件330一起运动;第二承载组件和第二测量组件330均设置在第二载物台340的上方,且第二承载组件用于承载第二激光组件(图中未显示)。
24.第二测量组件330用于接触到第二载物台340时获得第二载物台340的高度,并且将第二载物台340的高度发送给控制模块。
25.控制模块用于比较第一载物台240的高度和第二载物台340的高度,并且用于在第一载物台240的高度和第二载物台340的高度之差超过预设值时,控制报警模块报警。
26.预设值可以按照实际需求设定,一般来说,预设值可以为激光加工允许的焦距偏移的最大值,例如,可以为0μm~150μm。
27.这种双工位激光加工设备通过第一测量组件230获得第一载物台240的高度,通过第二测量组件330获得第二载物台340的高度,当第一载物台240的高度和第二载物台340的高度之差超过预设值时,控制模块控制报警模块报警。
28.相对于传统的做法,这种双工位激光加工设备可以自动测量第一载物台240的高度和第二载物台340的高度,减少了耗时的同时,提高了加工效率,且利于设备朝着自动化与智能化的趋势发展。
29.此外,双工位激光加工设备还可以对放置在第一载物台240上的第一待测物的厚度进行测量,以及对放置在第二载物台340上的第二待测物的厚度进行测量。
30.以第一激光加工设备200测量第一待测物的厚度为例。当第一测量组件230接触到第一待测物时获得第一待测物的高度,第一载物台240的高度和第一待测物的高度之差即为第一待测物的厚度。
31.需要指出的是,当第一待测物为待加工物和治具的组合时,此时测得的第一待测物的厚度,实际上是待加工物和治具的厚度之和。
32.具体来说,第一z轴动力组件210用于驱动第一承载组件沿竖直方向运动,从而带动第一测量组件230一起运动,配合第一水平运动组件驱动第一载物台240沿水平方向运动,可以获得第一待测物的高度和第一载物台240的高度,从而获得第一待测物的厚度。
33.第一水平动力组件用于驱动第一载物台240沿水平方向运动,还可以对第一待测物实现多点测量(即在第一待测物上选择不同的测量点进行多次测量)。
34.一般来说,第一水平动力组件可以根据实际需求选择,只要能够实现驱动第一载物台240沿水平方向运动即可。
35.例如,第一水平动力组件可以为二轴运动平台。
36.同样的,第二水平动力组件也可以为二轴运动平台。
37.结合附图,第一z轴动力组件210包括安装在主架100上的第一动力件212和沿竖直方向延伸的第一轨道214,第一轨道214分别与主架100和第一承载组件连接,第一动力件212通过第一轨道214驱动第一承载组件沿竖直方向运动。
38.第二z轴动力组件310包括安装在主架100上的第二动力件312和沿竖直方向延伸的第二轨道314,第二轨道314分别与主架100和第二承载组件连接,第二动力件312通过第二轨道314驱动第二承载组件沿竖直方向运动。
39.结合附图,本实施方式中,第一动力件212he第二动力件312为步进电机。
40.步进电机精密度高,从而可以精密控制,提高厚度的测量精度。
41.结合附图,主架100上间隔设有第一安装槽120和第二安装槽140,第一动力件212设置在第一安装槽120内,第二动力件312设置在第二安装槽140内。
42.结合附图,第一承载组件包括第一承载件222,第一承载件222上设有第一激光加
工通孔224,第一激光组件设置在第一承载件222上,并且第一激光组件发出的激光通过第一激光加工通孔224射向第一载物台240。
43.第二承载组件包括第二承载件322,第二承载件322上设有第二激光加工通孔324,第二激光组件设置在第二承载件322上,并且第二激光组件发出的激光通过第二激光加工通孔324射向第二载物台340。
44.具体来说,第一承载件222包括第一底板2222、第一侧板2224、第二侧板2226和第三侧板2228,第一侧板2224、第二侧板2226和第三侧板2228依次自第一底板2222的边缘向上延伸,第一底板2222、第一侧板2224、第二侧板2226和第三侧板2228,第一侧板2224共同围成用于容纳第一激光组件的第一容纳腔,第一激光加工通孔224设置在第一底板2222上。
45.这样的设置,一方面可以对第一激光组件起到一定的保护作用,另一方面也便于第一承载件222与其他结构之间的连接。
46.第二承载件322包括第二底板3222、第四侧板3224、第五侧板3226和第六侧板3228,第四侧板3224、第五侧板3226和第六侧板3228依次自第二底板3222的边缘向上延伸,第二底板3222、第四侧板3224、第五侧板3226和第六侧板3228共同围成用于容纳第二激光组件的第二容纳腔,第二激光加工通孔324设置在第二底板3222上。
47.这样的设置,一方面可以对第二激光组件起到一定的保护作用,另一方面也便于第二承载件322与其他结构之间的连接。
48.更具体的,第一承载组件还包括与第一底板2222固定连接的第一固定件226,第一z轴动力组件210与第二侧板2226连接,第一测量组件230与第一固定件226连接。第一z轴动力组件210驱动第一承载件222沿竖直方向运动,从而带动第一固定件226和第一测量组件230一起运动。
49.更具体的,第二承载组件还包括与第二底板3222固定连接的第二固定件326,第二z轴动力组件310与第四侧板3224连接,第二测量组件330与第二固定件326连接。第二z轴动力组件310驱动第二承载件322沿竖直方向运动,从而带动第二固定件326和第二测量组件330一起运动。
50.优选的,本实施方式中,第一激光加工设备200还包括第一伸缩组件260,第一伸缩组件260包括与第一承载件222连接的第一支撑件262以及设置在第一支撑件262上的第三动力件264,第三动力件264与第一测量组件230连接,并且第三动力件264用于驱动第一测量组件230伸出或缩回。
51.第三动力件264驱动第一测量组件230伸出或缩回,这样就可以使得第一测量组件230在不需要测量时缩回,从而对第一测量组件230形成保护。
52.第二激光加工设备300还包括第二伸缩组件360,第二伸缩组件360包括与第二承载件322连接的第二支撑件362以及设置在第二支撑件362上的第四动力件364,第四动力件364与第二测量组件330连接,并且第四动力件364用于驱动第二测量组件330伸出或缩回。
53.第四动力件364驱动第二测量组件330伸出或缩回,这样就可以使得第二测量组件330在不需要测量时缩回,从而对第二测量组件330形成保护。
54.结合附图,本实施方式中,第一测量组件230包括第一探针232,第一探针232设置在第三动力件264靠近第一载物台240的一端。第三动力件264用于驱动第一探针232伸出或缩回。
55.第一探针232作为第一测量组件230中最脆弱且需要外露的元件,当不需要测量时,可以通过第三动力件264驱动第一探针232缩回,这样可以对第一探针232形成保护。
56.结合附图,本实施方式中,第二测量组件330包括第二探针332,第二探针332设置在第四动力件364靠近第二载物台340的一端。第三动力件264用于驱动第二探针332伸出或缩回。
57.第二探针332作为第二测量组件330中最脆弱且需要外露的元件,当不需要测量时,可以通过第四动力件364驱动第二探针332缩回,这样可以对第二探针332形成保护。
58.具体来说,第一测量组件230还包括第一连接件234和第一传感器236,第一连接件234与第三动力件264连接,第一探针232和第一传感器236均设置在第一连接件234上,并且第一探针232位于第一连接件234靠近第一载物台240的一端,第一传感器236设置在靠近第一探针232远离第一载物台240的一端。第三动力件264驱动第一连接件234沿竖直方向来回运动,从而带动第一探针232和第一传感器236一起运动。
59.本实施方式中,第一传感器236为ee-sx47凹槽接插式传感器。
60.第二测量组件330还包括第二连接件334和第二传感器336,第二连接件334与第四动力件364连接,第二探针332和第二传感器336均设置在第二连接件334上,并且第二探针332位于第二连接件334靠近第二载物台340的一端,第二传感器336设置在靠近第二探针332远离第二载物台340的一端。第四动力件364驱动第二连接件334沿竖直方向来回运动,从而带动第二探针332和第二传感器336一起运动。
61.本实施方式中,第二传感器336为ee-sx47凹槽接插式传感器。
62.本实施方式中,第三动力件264和第四动力件364均为气缸,第三动力件264用于驱动第一探针232相对于第一支撑件262伸出或缩回,第四动力件364用于驱动第二探针332相对于第二支撑件362伸出或缩回。
63.气缸作为第三动力件264和第四动力件364可以很好的实现驱动第一探针232和第二探针332伸缩的功能,精度高、可靠性强且节省成本。
64.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对申请专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1