一种自动激光刻印机的制作方法
1.本实用新型属于激光刻印领域,具体涉及一种自动激光刻印机。
背景技术:
2.随着科技的进步和人们生活水平的提高,激光刻印机的使用已渗入各行各业。激光刻印机,顾名思义,既是利用激光对需要雕刻的材料进行雕刻的一种先进设备。激光刻印机不同于机械雕刻机和其他传统的手工雕刻方式,机械雕刻机是使用机械手段,比如金刚石等硬度极高的材料来雕刻其他东西。
3.而激光刻印机则是使用激光的热能对材料进行雕刻,激光刻印机内的激光器是其核心所在。一般来说,激光刻印机的使用范围更加广泛,而且雕刻精度更高,雕刻速度也更加快捷。而且相对于传统的手工雕刻方式,激光雕刻也可以将雕刻效果做到很细腻,丝毫不亚于手工雕刻的工艺水平。正是因为激光刻印机有着如此多的优越性,所以现在激光刻印机的应用已经逐渐取代了传统的雕刻设备和方式。成为主要的雕刻设备。激光刻印机可是在各种材料表面进行标记的设备,其原理是利用激光束产生的高温使材料表面发生不同程度的烧蚀,达到留下印记的目的;激光刻印机可在各种材料上标记各种复杂的图形、文字、条码等。标记速度快具有永久性。是标记产品提升产品档次的首选。
4.但是,现有激光刻印机不能实现自动对焦,需要人工安装调整坐标,手动对焦,操作复杂,刻印效率底。
技术实现要素:
5.为了解决现有技术存在的上述问题,本实用新型目的在于提供一种自动激光刻印机。
6.本实用新型所采用的技术方案为:
7.一种自动激光刻印机,包括安装座、支撑架、升降机构、激光刻印机、激光位移传感器和坐标指示盘,安装座上安装有支撑架,支撑架上安装有升降机构,升降机构带动激光刻印机沿支撑架上下移动,激光刻印机和升降机构均与激光位移传感器电性连接,坐标指示盘安装在安装座的一侧,坐标指示盘上等间距设置有若干坐标指示点,激光位移传感器用于识别坐标指示点并将识别位置信息发送给激光刻印机和升降机构。
8.进一步地,若干坐标指示点纵横等间距排布满整个坐标指示盘。
9.进一步地,支撑架包括有两根支架滑轨,支架滑轨上安装有滑块,激光刻印机安装有在滑块上,升降机构与滑块连接,且升降机构带动滑块沿支架滑轨上下移动。
10.进一步地,升降机构包括升降气缸,升降气缸安装在支撑架的顶面,且升降气缸的升降轴穿过支撑架的顶壁与滑块连接。
11.进一步地,支撑架顶部设有第一限位件,第一限位件顶面与支撑架顶面齐平,第一限位件用于限制滑块继续向上位移。
12.进一步地,支撑滑轨底部均设有第二限位件,第二限位件用于限制滑块继续向下
位移。
13.进一步地,滑块内部还设置有旋转机构,旋转机构与激光刻印机连接并带动激光刻印机旋转。
14.进一步地,激光刻印机选用jq型号的激光刻印机。
15.进一步地,激光位移传感器选用ft0 rla
‑
0系列。
16.本实用新型的有益效果为:
17.本实用新型提供了一种自动激光刻印机,通过设置有激光位移感应器和位移指示盘,坐标指示盘上等间距设置有若干坐标指示点,激光位移感应器可以感应位移指示盘上的点,且激光位移感应器连接有激光刻印机和升降机构,激光位移感应器能将识别到的位置信息发送至升降机构,升降机构带动激光刻印机到位之后,激光刻印机开始刻印,且在刻印过程中激光位移感应器可以实时识别雕刻状态,并将实时位置信息反馈给升降机构以及激光刻印机,进而可以实先自动对焦,提高雕刻效率。
附图说明
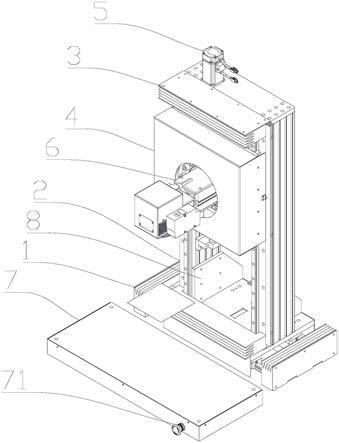
18.图1是本实用新型的结构示意图;
19.图2是本实用新型的正视示意图;
20.图3是本实用新型的侧视示意图;
21.图4是本实用新型的俯视示意图;
22.图中:1
‑
安装座,2
‑
支撑架,3
‑
第一限位件,4
‑
滑块,5
‑
升降机构,6
‑
激光刻印机,61
‑
激光位移感应器;7
‑
位移指示盘,71
‑
坐标指示点,8
‑
第二限位件。
具体实施方式
23.实施例一:
24.在本实施例中,如图1~4所示,一种自动激光刻印机,包括安装座1、支撑架2、升降机构5、激光刻印机6、激光位移传感器61和位移指示盘7,安装座1上安装有支撑架2,支撑架2上安装有升降机构5,升降机构5带动激光刻印机6沿支撑架2上下移动,激光刻印机6和升降机构5均与激光位移传感器61电性连接,位移指示盘7安装在安装座1的一侧,位移指示盘7上等间距设置有若干坐标指示点72,激光位移传感器61用于识别坐标指示点72并将识别位置信息发送给激光刻印机6和升降机构5。
25.在本实施例中,通过设置有激光位移感应器61和位移指示盘7,位移指示盘7上等间距设置有若干坐标指示点71,激光位移感应器61可以感应位移指示盘7上的坐标指示点71,且激光位移感应器61连接有激光刻印机6和升降机构5,激光位移感应器61能将识别到的位置信息发送至升降机构5,升降机构5带动激光刻印机6到位之后,激光刻印机6开始刻印,且在刻印过程中激光位移感应器61可以实时识别雕刻状态,并将实时位置信息反馈给升降机构5以及激光刻印机6,进而可以实先自动对焦,提高雕刻效率。
26.在本实施例中,安装座1用于安装并固定整个激光刻印机的位置,支撑架2安装在安装座1的中间位置,支撑架2采用铝型材,且支撑架2整体呈门字型。
27.在本实施中,激光刻印机6、激光位移感应器61以及升降机构5连接至同一plc控制器(图中未示出),通过plc控制器对激光位移感应器61识别的信号进行处理,别发送动作指
令给激光刻印机6和升降机构5,进而可以实现自动刻印。
28.在本实施例中,如图1~4所示,若干坐标指示点72纵横等间距排布满整个位移指示盘7,坐标指示点71用于显示待刻印的工件在位移指示盘7上的位置,其位置信息能被激光位移传感器61识别。
29.在本实施例中,如图1~4所示,支撑架2包括有两根支架滑轨,两根支架滑轨分别设置在支撑架2的两侧,支架滑轨上安装有滑块4,激光刻印机6安装有在滑块4上,升降机构5与滑块4连接,且升降机构5带动滑块4沿支架滑轨上下移动。
30.在本实施例中,如图1~4所示,升降机构5包括升降气缸,升降气缸安装在支撑架2的顶面,且升降气缸的升降轴穿过支撑架2的顶壁与滑块4连接,升降气缸用于带动滑块4上下移动。
31.在本实施例中,如图1~4所示,支撑架2顶部设有第一限位件3,第一限位件3顶面与支撑架2顶面齐平,第一限位件3用于限制滑块4继续向上位移,具体的,第一限位件3为限位块,在升降气缸行程出现异常时,限位块可用于与滑块4碰撞防止滑块过度位移从而对其它元器件造成损坏。
32.在本实施例中,如图1~4所示,支撑滑轨底部均设有第二限位件8,第二限位件8用于限制滑块4继续向下位移,第二限位件8为设置在支撑架2底部两侧的限位板,在升降气缸行程出现异常时,第二限位件8可用于与滑块4碰撞来限制滑块4继续运动,从而可以防止滑块4过度位移下方的位移指示盘7造成损坏。
33.在本实施例中,滑块4内部还设置有旋转机构(图中未示出),旋转机构与激光刻印机6连接并带动激光刻印机6旋转,作为优选的,旋转机构选用旋转气缸,旋转气缸与plc控制器电连接,从而可以实现多角度对位移指示盘7上的待刻印物件进行刻印。
34.在本实施例中,具体的,激光刻印机6选用jq1412型号的激光刻印机。
35.在本实施例中,具体的,激光位移传感器61选用ft50 rla
‑
20系列。
36.实施例二:
37.在本实施例中,如图1~4所示,一种自动激光刻印机,包括安装座1、支撑架2、升降机构5、激光刻印机6、激光位移传感器61和位移指示盘7,安装座1上安装有支撑架2,支撑架2上安装有升降机构5,升降机构5带动激光刻印机6沿支撑架2上下移动,激光刻印机6和升降机构5均与激光位移传感器61电性连接,位移指示盘7安装在安装座1的一侧,位移指示盘7上等间距设置有若干坐标指示点72,激光位移传感器61用于识别坐标指示点72并将识别位置信息发送给激光刻印机6和升降机构5。
38.在本实施例中,通过设置有激光位移感应器61和位移指示盘7,位移指示盘7上等间距设置有若干坐标指示点71,激光位移感应器61可以感应位移指示盘7上的坐标指示点71,且激光位移感应器61连接有激光刻印机6和升降机构5,激光位移感应器61能将识别到的位置信息发送至升降机构5,升降机构5带动激光刻印机6到位之后,激光刻印机6开始刻印,且在刻印过程中激光位移感应器61可以实时识别雕刻状态,并将实时位置信息反馈给升降机构5以及激光刻印机6,进而可以实先自动对焦,提高雕刻效率。
39.在本实施中,激光刻印机6、激光位移感应器61以及升降机构5连接至同一plc控制器(图中未示出),通过plc控制器对激光位移感应器61识别的信号进行处理,别发送动作指令给激光刻印机6和升降机构5,进而可以实现自动刻印。
40.在本实施例中,如图1~4所示,支撑架2包括有两根支架滑轨,两根支架滑轨分别设置在支撑架2的两侧,支架滑轨上安装有滑块4,激光刻印机6安装有在滑块4上,升降机构5与滑块4连接,且升降机构5带动滑块4沿支架滑轨上下移动。
41.在本实施例中,如图1~4所示,升降机构5包括升降气缸,升降气缸安装在支撑架2的顶面,且升降气缸的升降轴穿过支撑架2的顶壁与滑块4连接,升降气缸用于带动滑块4上下移动。
42.在本实施例中,滑块4内部还设置有旋转机构(图中未示出),旋转机构与激光刻印机6连接并带动激光刻印机6旋转,作为优选的,旋转机构选用旋转气缸,旋转气缸与plc控制器电连接,从而可以实现多角度对位移指示盘7上的待刻印物件进行刻印。
43.本实施例与实施例一的区别在于,在本实施例中,安装座1用于安装并固定整个激光刻印机的位置,支撑架2采用铝型材,且支撑架2整体呈门字型;同时,安装座1上设置有滑动模组,支撑架2安装在滑动模组上,滑动模组可带动支撑架2在水平方向位移,具体的,滑动模组可带动支撑架2以及安装在支撑架2上的设备从安装座1的方向到位移指示盘7的方向来回运动,且滑动模组与plc控制器连接,进而可以实现对激光刻印机6水平方向上自动控制。
44.在本实施例中,其余未涉及的技术方案均与实施例一保持一致。
45.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
46.尽管上面已经示出和描述了本实用新型的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本实用新型的限制,本领域的普通技术人员在本实用新型的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1