一种旋挖机动臂焊接定位装置的制作方法
一种旋挖机动臂焊接定位装置
【技术领域】
1.本实用新型涉及旋挖机领域,尤其涉及一种旋挖机动臂焊接定位装置。
背景技术:
2.旋挖机又称旋挖钻机,打桩机。旋挖机是一种综合性的钻机,它可以用于多种地层,具有成孔速度快,污染少,机动性强等特点。短螺旋钻头进行干挖作业,也可以用回转钻头在泥浆护壁的情况下进行湿挖作业。旋挖机可以配合冲锤钻碎坚硬地层后进行挖孔作业。如果配合扩大头钻具,可在孔底进行扩孔作业。旋挖机采用多层伸缩式钻杆,钻进辅助时间少,劳动强度低,不需要泥浆循环排渣,节约成本,特别适合于城市建设的基础施工。
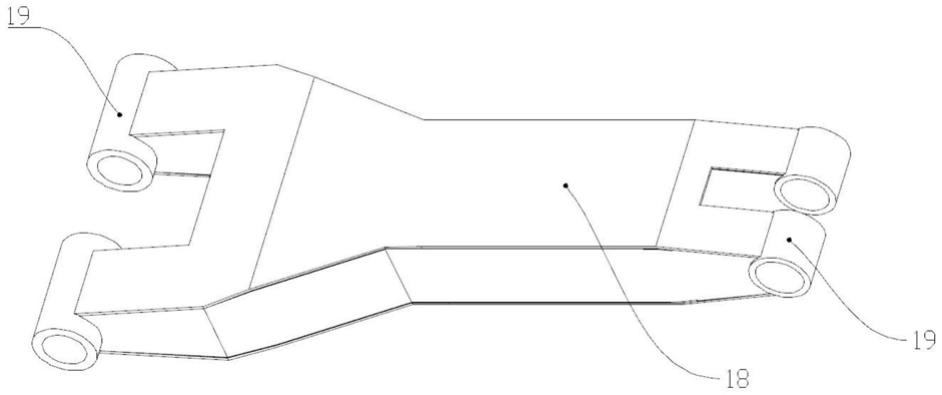
3.动臂是旋挖钻机变幅机构重要的组成部件,在旋挖钻机工作过程中,动臂承受较大的载荷力。如图1所示,现有的动臂是蜂腰状,下端宽度大于上端宽度,并且上下端是开槽式,中间是中空的,动臂18上端部和下端部两侧都焊接有套筒(19),动臂组装时,通过轴销将动臂与三角架及旋挖机连接,动臂上套筒焊接时,需要保证两个套筒的轴线在同一条直线上才能保证动臂组装后,轴销受力均匀,但是现有的焊接装置无法保证对应位置套筒在一条直线上,严重影响动臂的使用寿命。
4.本实用新型即是针对现有技术的不足而研究提出的。
技术实现要素:
5.本实用新型的目的是克服上述现有技术的缺点,提供了一种旋挖机动臂焊接定位装置。
6.本实用新型可以通过以下技术方案来实现:
7.本实用新型公开了一种旋挖机动臂焊接定位装置,包括底板,所述底板上端固定有固定环,所述固定环上设置有与固定环转动连接的支撑管,所述支撑管两侧均设置有与支撑管螺纹连接的支撑杆,所述支撑杆末端设置在支撑管内并与支撑管螺纹连接,所述支撑杆上均固定有支撑块,所述支撑管两侧的底板上均固定有定位装置,所述定位装置包含固定在底板上的定位环,所述定位环上均设置有与定位环转动连接的定位管,所述定位管上设置有与定位管螺纹连接的定位杆,所述定位杆上均固定有定位块,所述定位管、支撑管均由电机驱动转动,所述底板上端两侧还对称固定有限位环,所述底板上方还设置有限位杆,所述限位杆穿过限位环并与限位环滑动连接,所述限位杆穿过支撑杆并与支撑杆滑动连接,所述限位杆穿过定位杆并与定位杆滑动连接。根据动臂焊接后,相对位置套筒间的距离调整支撑杆在支撑管上的位置,将支撑杆调整到合适位置后,将待焊接的套筒分别放在支撑块与定位块之间,并将限位杆穿过定位杆、套筒、支撑杆和限位环,限位杆固定后,通过电机驱动支撑管和定位管转动,由于限位杆穿过定位杆和支撑杆,并且限位杆与限位环滑动连接,并且支撑杆与支撑管螺纹连接,定位杆与定位管螺纹连接,支撑管和定位管转动时,支撑杆与对应位置的定位杆相互靠近,支撑块与定位块相互靠近,对应位置的支撑块和定位块分别从套筒两侧插入到套筒内后将套筒固定,两个套筒均被固定后将两个套筒焊接
在动臂上,套筒焊接后,通过电机驱动支撑管和定位管反向转动,支撑块与定位块相互远离,定位块和支撑块与套筒分离后,取下限位杆,通过本装置可以满足将两个动臂的套筒固定,并且套筒固定后套筒的轴线在同一条直线上,并且通过调整支撑杆的初始位置可以实现调整套筒固定后两个套筒间的距离,满足不同规定的动臂套筒焊接需求。
8.优选的,所述支撑块为锥形。
9.优选的,所述定位块为锥形。
10.优选的,所述支撑管上固定有支撑齿盘,所述定位管上固定有定位齿盘,所述电机的输出端固定有转轴,所述转轴上与支撑齿盘对应位置固定有与支撑齿盘啮合的齿轮,所述转轴上与定位齿盘对应位置也固定有齿轮,所述齿轮与对应位置的定位齿盘啮合。电机驱动转轴转动可以实现支撑管和定位管同步转动。
11.优选的,所述限位杆为方形,所述限位环、支撑杆和定位杆上均设置有限位杆穿过的方形孔。
12.优选的,所述定位杆和支撑杆的轴线在同一条直线上。
13.本实用新型与现有的技术相比有如下优点:
14.通过本装置可以满足将两个动臂的套筒固定,并且套筒固定后套筒的轴线在同一条直线上,并且通过调整支撑杆的初始位置可以实现调整套筒固定后两个套筒间的距离,满足不同规定的动臂套筒焊接需求。
【附图说明】
15.下面结合附图对本实用新型的具体实施方式作进一步详细说明,其中:
16.图1为动臂结构示意图;
17.图2为本实用新型的结构示意图;
18.图3为本实用新型的俯视图;
19.图4为图3中a-a处剖视图;
20.图中:1、底板;2、固定环;3、支撑管;4、支撑齿盘;5、支撑杆;6、支撑块;7、定位装置;8、定位环;9、定位管;10、定位齿盘;11、定位块;12、限位环;13、限位杆;14、电机;15、转轴;16、齿轮;17、定位杆;18、动臂;19、套筒;
【具体实施方式】
21.下面结合附图对本实用新型的实施方式作详细说明:
22.如图1和图4所示,本实用新型公开了一种旋挖机动臂焊接定位装置,包括底板 1,底板1上端固定有固定环 2,固定环2上设置有与固定环2转动连接的支撑管3,支撑管3两侧均设置有与支撑管3螺纹连接的支撑杆5,支撑杆5末端设置在支撑管3内并与支撑管3螺纹连接,支撑杆5上均固定有支撑块6,支撑管3两侧的底板1上均固定有定位装置7,定位装置7包含固定在底板1上的定位环8,定位环8上均设置有与定位环8转动连接的定位管9,定位管9上设置有与定位管9螺纹连接的定位杆17,定位杆17上均固定有定位块11,定位管9、支撑管3均由电机14驱动转动,底板1上端两侧还对称固定有限位环 12,底板1上方还设置有限位杆 13,限位杆13穿过限位环12并与限位环12滑动连接,限位杆13穿过支撑杆5并与支撑杆5滑动连接,限位杆13穿过定位杆17并与定位杆17滑动连接。根据动臂18焊接后,相对位
置套筒19间的距离调整支撑杆5在支撑管3上的位置,将支撑杆5调整到合适位置后,将待焊接的套筒19分别放在支撑块6与定位块11之间,并将限位杆13穿过定位杆17、套筒19、支撑杆5和限位环12,限位杆13固定后,通过电机14驱动支撑管3和定位管9转动,由于限位杆13穿过定位杆17和支撑杆5,并且限位杆13与限位环12滑动连接,并且支撑杆5与支撑管3螺纹连接,定位杆17与定位管9螺纹连接,支撑管3和定位管9转动时,支撑杆5与对应位置的定位杆17相互靠近,支撑块6与定位块11相互靠近,对应位置的支撑块6和定位块11分别从套筒19两侧插入到套筒19内后将套筒19固定,两个套筒19均被固定后将两个套筒19焊接在动臂18上,套筒19焊接后,通过电机14驱动支撑管3和定位管9反向转动,支撑块6与定位块11相互远离,定位块11和支撑块6与套筒19分离后,取下限位杆13,通过本装置可以满足将两个动臂18的套筒19固定,并且套筒19固定后套筒19的轴线在同一条直线上,并且通过调整支撑杆5的初始位置可以实现调整套筒19固定后两个套筒19间的距离,满足不同规定的动臂18套筒19焊接需求。
23.其中,支撑块6为锥形。
24.其中,定位块11为锥形。
25.其中,支撑管3上固定有支撑齿盘4,定位管9上固定有定位齿盘 10,电机14的输出端固定有转轴 15,转轴15上与支撑齿盘4对应位置固定有与支撑齿盘4啮合的齿轮16,转轴15上与定位齿盘10对应位置也固定有齿轮16,齿轮16与对应位置的定位齿盘10啮合。电机14驱动转轴15转动可以实现支撑管3和定位管9同步转动。
26.其中,限位杆13为方形,限位环12、支撑杆5和定位杆17上均设置有限位杆13穿过的方形孔。
27.其中,定位杆17和支撑杆5的轴线在同一条直线上。
28.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,可以对这些实施例进行多种变化、修改、替换和变型,这些变化、修改、替换和变型,也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1