一种集装箱生产的可移动冲料手臂的制作方法
1.本实用新型涉及集装箱生产加工辅助设备领域,尤其涉及一种集装箱生产的可移动冲料手臂。
背景技术:
2.集装箱行业现有的顶板加工工艺一般是由预处理好的钢板由人工压型和四边修剪两条工艺路线组成的。此两条路线是相互独立的,通过运转工序相互连接,从预处理好的钢板到压机人工压型堆垛,通过车间运输小车转运至修剪工序;这样的加工工序,在人工上料、堆垛、吊运、卸料等过程,生劳动强度大、生产效率低、人力成本较高。
技术实现要素:
3.本实用新型目的是在于提供一种可移动式,自动化运行,无人工操作的冲压压型的设备
4.一种集装箱生产的可移动冲料手臂,底架组件、安装架板、机械臂组件、前端组件、辅助夹头、驱动组件、限位组件和工控主机;
5.所述底架组件包括平行架体、滑动轨和驱动齿;所述平行架体安装在地面,滑动轨对应安装在平行架体上,所述驱动齿固定安装在其中一个滑动轨内侧;所述安装架板通过滑块滑动嵌套在滑动轨上,所述驱动组件设置在安装架板末端,并且输出端与驱动齿啮合配合;所述机械臂组件设置在安装架板上,所述前端组件安装在机械臂组件的末端,所述辅助夹头装配在前端组件上;所述限位组件安装在平行架体之间,用于限制安装架板的滑动距离;所述工控主机设置在安装架板上,并位于机械臂组件侧边;
6.所述机械臂组件、前端组件、驱动组件和限位组件均与工控主机信号连接;
7.进一步的,所述驱动组件包括驱动电机和输出轮;所述驱动电机固定在安装架板上,其输出端连接输出轮,所述输出轮为双层轮体,其轮体之间设有若干连接柱;所述连接柱与驱动齿的对应啮合;
8.进一步的,所述机械臂组件为三轴机械臂,包括转动底座以及用于驱动转动的转向电机、伸缩臂以及用于驱动伸缩的伸缩电机、作业臂以及控制作业角度的调整电机;所述转动底座、伸缩臂和作业臂依次通过相应减速器转动连接;所述作业臂的末端安装有前端组件;所述转向电机、伸缩电机和调整电机均与工控主机信号连接;
9.进一步的,所述前端组件包括微调电机和连接架;所述连接架转动安装在作业臂端头,所述连接架用于连接辅助夹头;所述微调电机与工控主机信号连接;
10.进一步的,所述辅助夹头包括辅助横板、调整连杆和辅助吸头;所述辅助横板固定在连接架上,所述调整连杆通过螺栓螺接在辅助横板两侧;所述辅助吸头分布在辅助横板和调整连杆的下端面;
11.进一步的,所述限位组件包括限位电缸和限位档条;所述限位电缸水平放置,其输出端用于推动限位档条的转动;
12.本实用新型的有益效果是:
13.采用本实用新型,整体构造简单,整体自动化控制驱动用各个电机,实现精准的工位快速切换移动和空间内多点定位作业;丰富的拓展性,可适用多种尺寸与型号的集装箱板材的生产与加工,提供过稳定的运行性能与无人化的自动化操作,提高整体的生产效率,减少人工与时间成本。
附图说明
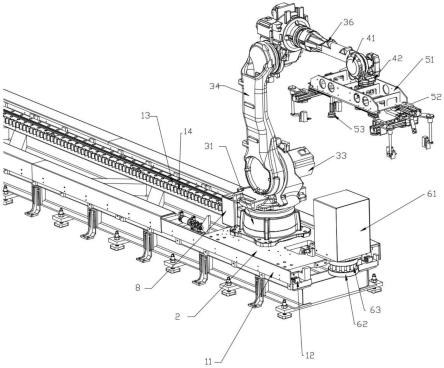
14.图1是本实用新型的整体结构示意图;
15.图2是本实用新型的斜后侧示意图。
具体实施方式
16.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
17.参考图1-2所示,一种集装箱生产的可移动冲料手臂,底架组件1、安装架板2、机械臂组件3、前端组件4、辅助夹头5、驱动组件6、限位组件7和工控主机8;
18.所述底架组件1包括平行架体11、滑动轨12和驱动齿13;所述平行架体11安装在地面,滑动轨12对应安装在平行架体11上,所述驱动齿13固定安装在其中一个滑动轨12内侧;所述安装架板2通过滑块滑动嵌套在滑动轨12上,所述驱动组件6设置在安装架板2末端,并且输出端与驱动齿13啮合配合;所述机械臂组件3设置在安装架板2上,所述前端组件4安装在机械臂组件3的末端,所述辅助夹头5装配在前端组件4上;所述限位组件7安装在平行架体11之间,用于限制安装架板2的滑动距离;所述工控主机8设置在安装架板2上,并位于机械臂组件3侧边;
19.所述机械臂组件3、前端组件4、驱动组件6和限位组件7均与工控主机8信号连接;
20.进一步的,所述驱动组件6包括驱动电机61和输出轮62;所述驱动电机61固定在安装架板2上,其输出端连接输出轮62,所述输出轮62为双层轮体,其轮体之间设有若干连接柱63;所述连接柱63与驱动齿13的对应啮合;
21.本实施例中,驱动电机61进行转动输出,通过输出轮62的啮合驱动,使得安装架板2整体在驱动齿13的行程内可实现灵活的运动,搭配滑动轨12可实现稳定顺畅的工位切换,实现多工位可移动的冲压辅助。
22.进一步的,所述机械臂组件3为三轴机械臂,包括转动底座31以及用于驱动转动的转向电机32、伸缩臂34以及用于驱动伸缩的伸缩电机33、作业臂36以及控制作业角度的调整电机35;所述转动底座31、伸缩臂34和作业臂36依次通过相应减速器转动连接;所述作业臂36的末端安装有前端组件4;所述转向电机32、伸缩电机33和调整电机35均与工控主机8信号连接;
23.本实施例中,三轴式机械臂组件3可以应对底架组件1两端的多工位拓展,通过转向电机32、伸缩电机33和调整电机35的自动化控制,可实现机械臂行程内的多点定位工作;有效完成冲压压边作业的辅助工作;
24.进一步的,所述前端组件4包括微调电机41和连接架42;所述连接架42转动安装在
作业臂36端头,所述连接架42用于连接辅助夹头5;所述微调电机41与工控主机8信号连接;
25.本实施例证,前端组件4中通过微调电机41可以调整连接架42的朝向角度,进一步提高机械臂组件3前段的工作精度,扩大整体的工作范围,提高生产工作效率。
26.进一步的,所述辅助夹头5包括辅助横板51、调整连杆52和辅助吸头53;所述辅助横板51固定在连接架42上,所述调整连杆52通过螺栓螺接在辅助横板51两侧;所述辅助吸头53分布在辅助横板51和调整连杆52的下端面;
27.本实施例中,因为集装箱的生产中,顶板往往较长,对应不同尺寸和型号的板材,冲压压型作业中对机械臂的夹持和搬运能力都不一样,因此采用可调整间距的调整连杆52可以应对不同的尺寸和型号;并且通过辅助吸头53可以进一步的保证对各个型号的集装箱板材的适应。
28.进一步的,所述限位组件7包括限位电缸71和限位档条72;所述限位电缸71水平放置,其输出端用于推动限位档条72的转动;
29.本实施例中,限位组件7中,通过对限位电缸71的控制,可以灵活控制限位档条72的升降,并且根据不同生产安装工艺,可以进行若干限位组件7的多组式设置。
30.采用本实用新型,整体构造简单,整体自动化控制驱动用各个电机,实现精准的工位快速切换移动和空间内多点定位作业;丰富的拓展性,可适用多种尺寸与型号的集装箱板材的生产与加工,提供过稳定的运行性能与无人化的自动化操作,提高整体的生产效率,减少人工与时间成本。
31.本文中所描述的具体实施例仅仅是对本实用新型精神作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的精神所定义的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1